También podría gustarte
- Protocolos de Prueba de Megado SDPDocumento96 páginasProtocolos de Prueba de Megado SDPJuanpio Chambi50% (4)
- Presupuesto de Redes ElectricasDocumento14 páginasPresupuesto de Redes Electricascarlos bruno100% (1)
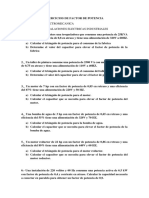
- Ejercicios de Factor de PotenciaDocumento3 páginasEjercicios de Factor de PotenciaAlexander VelezAún no hay calificaciones
- Código de Colores de Los Cables Eléctricos NormalizadosDocumento15 páginasCódigo de Colores de Los Cables Eléctricos NormalizadosGerardo RAMOS BERNALAún no hay calificaciones
- Leyes de KirchhoffDocumento6 páginasLeyes de KirchhoffStefany Lastra100% (2)
- Arrancadores ElectrónicosDocumento18 páginasArrancadores ElectrónicosCarlos FernandezAún no hay calificaciones
- Electricidad y Electronica Industrial. - Electronica Indusrial BasicaDocumento39 páginasElectricidad y Electronica Industrial. - Electronica Indusrial BasicaNizayet Jacinto Cruz83% (12)
- Plan Lector-Vii Ciclo-Ciencia y TecnologíaDocumento2 páginasPlan Lector-Vii Ciclo-Ciencia y TecnologíaRichard100% (3)
- Practica 6 FluidosDocumento6 páginasPractica 6 FluidosLeoAún no hay calificaciones
- Dialnet InvestigacionesCualitativasEnCienciaYTecnologia201 718933 PDFDocumento490 páginasDialnet InvestigacionesCualitativasEnCienciaYTecnologia201 718933 PDFRey David Castillo VegaAún no hay calificaciones
- Reglamento Los Chicos Que LloranDocumento2 páginasReglamento Los Chicos Que LloranOmar EduardoAún no hay calificaciones
- Hacia La Declaración de Los Derechos de La Naturaleza - Alberto AcostaDocumento16 páginasHacia La Declaración de Los Derechos de La Naturaleza - Alberto AcostaOscar E Villanueva LAún no hay calificaciones
- Protocolo Actividades Presenciales-12octubre 2021Documento25 páginasProtocolo Actividades Presenciales-12octubre 2021Omar EduardoAún no hay calificaciones
- Dialnet ResolucionDeEcuacionesNoLinealesConExcel 6010315Documento19 páginasDialnet ResolucionDeEcuacionesNoLinealesConExcel 6010315Ilmer SoriaAún no hay calificaciones
- WallonDocumento3 páginasWallonOmar EduardoAún no hay calificaciones
- Nom 064 Scfi 2000Documento21 páginasNom 064 Scfi 2000Omar EduardoAún no hay calificaciones
- Dependencia: Expediente: Asunto: A Quien CorrespondaDocumento1 páginaDependencia: Expediente: Asunto: A Quien CorrespondaOmar EduardoAún no hay calificaciones
- Aplicación de Un Método Grafico para La Sintonización Del Control PID Utilizando MatlabDocumento5 páginasAplicación de Un Método Grafico para La Sintonización Del Control PID Utilizando MatlabOmar EduardoAún no hay calificaciones
- Diseño SecuencialDocumento36 páginasDiseño SecuencialOmar EduardoAún no hay calificaciones
- HuellaDocumento28 páginasHuellaRené Alberto Martínez MagdalenoAún no hay calificaciones
- PDF - Práctica 6Documento30 páginasPDF - Práctica 6Omar EduardoAún no hay calificaciones
- Practica de LaboratorioDocumento13 páginasPractica de LaboratorioOmar EduardoAún no hay calificaciones
- PDF - Práctica 3 1 PDFDocumento19 páginasPDF - Práctica 3 1 PDFOmar EduardoAún no hay calificaciones
- Dependencia: Expediente: Asunto: A Quien CorrespondaDocumento1 páginaDependencia: Expediente: Asunto: A Quien CorrespondaOmar EduardoAún no hay calificaciones
- 12 ContadoresDocumento7 páginas12 ContadoresOmar EduardoAún no hay calificaciones
- Lazo Abierto 2°ordenDocumento2 páginasLazo Abierto 2°ordenOmar EduardoAún no hay calificaciones
- Integrador-Diferenciador y Controladores P-PI-PD-PIDDocumento5 páginasIntegrador-Diferenciador y Controladores P-PI-PD-PIDOmar EduardoAún no hay calificaciones
- Examen de sistemas de iluminación: preguntas sobre IRC, CCT, eficiencia de luminariasDocumento2 páginasExamen de sistemas de iluminación: preguntas sobre IRC, CCT, eficiencia de luminariasOmar EduardoAún no hay calificaciones
- Controladores PI Con Acción de Reset PDFDocumento74 páginasControladores PI Con Acción de Reset PDFSin NombreAún no hay calificaciones
- PDF - Práctica 6Documento30 páginasPDF - Práctica 6Omar EduardoAún no hay calificaciones
- 2009 - Los Resúmenes para Artículos de InvestigaciónDocumento9 páginas2009 - Los Resúmenes para Artículos de InvestigaciónInés Aurora Alvarado AlvarezAún no hay calificaciones
- MetNum2 0 PDFDocumento18 páginasMetNum2 0 PDFEdwardFireAún no hay calificaciones
- Calculo Numerico Us PDFDocumento189 páginasCalculo Numerico Us PDFKriss SketyAún no hay calificaciones
- Catálogo Universidad 2018 - WebDocumento50 páginasCatálogo Universidad 2018 - WebManuel Galocha CuevasAún no hay calificaciones
- Punto FijoDocumento4 páginasPunto FijoCristian Camilo GonzalezAún no hay calificaciones
- 2008 8artes Educan tcm30-163667Documento8 páginas2008 8artes Educan tcm30-163667Omar EduardoAún no hay calificaciones
- Actividad 3. Inst. Elec. Ind. Práctica 2Documento2 páginasActividad 3. Inst. Elec. Ind. Práctica 2Omar EduardoAún no hay calificaciones
- Reporte Equipos MecanicosDocumento13 páginasReporte Equipos MecanicosOmar EduardoAún no hay calificaciones
- Mapa ConceptualDocumento1 páginaMapa ConceptualMadelineAlexandraReynosoGómez80% (5)
- Ejercicios Propuestos Mov CircularDocumento3 páginasEjercicios Propuestos Mov CircularDome Obando70% (10)
- Física I - Trabajo y Energía - Primera Parte - UccDocumento12 páginasFísica I - Trabajo y Energía - Primera Parte - UccBulaAún no hay calificaciones
- Electrodinámica: corriente eléctrica y ley de OhmDocumento13 páginasElectrodinámica: corriente eléctrica y ley de OhmDarienj DueñesAún no hay calificaciones
- Modelos de Ingeniería EléctricaDocumento10 páginasModelos de Ingeniería EléctricaRenatoAún no hay calificaciones
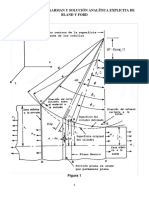
- Ecuación de Von Karman y Solución Analítica Explicita de Bland y FordDocumento14 páginasEcuación de Von Karman y Solución Analítica Explicita de Bland y FordJose EAún no hay calificaciones
- Aceleración de dos cuerpos unidos por cuerda: estudio experimentalDocumento3 páginasAceleración de dos cuerpos unidos por cuerda: estudio experimentalMateo RiveraAún no hay calificaciones
- Sistemas de Control de Respuesta Sísmica en EdificacionesDocumento18 páginasSistemas de Control de Respuesta Sísmica en EdificacionesBrian Machicado MirandaAún no hay calificaciones
- PDN 2016 Junio CIE 4 AptusDocumento14 páginasPDN 2016 Junio CIE 4 AptusAndrea Osorio LatorreAún no hay calificaciones
- TemariioDocumento16 páginasTemariioNoemi Morales HernandezAún no hay calificaciones
- Examen Fisica 1Documento3 páginasExamen Fisica 1Yanina GonzalezAún no hay calificaciones
- Analisis de NodosDocumento5 páginasAnalisis de NodosNelson GonzalezAún no hay calificaciones
- Corriente de FoucaultDocumento6 páginasCorriente de FoucaultDiana TamayoAún no hay calificaciones
- Cargas Eléctricas y Cuerpos ElectrizadosDocumento9 páginasCargas Eléctricas y Cuerpos ElectrizadosLuis Miguel Sulca HuamaniAún no hay calificaciones
- Laboratorio2 Grupo1 PDFDocumento10 páginasLaboratorio2 Grupo1 PDFJefferson OcsaAún no hay calificaciones
- Motores asíncronos INACAP ValparaisoDocumento34 páginasMotores asíncronos INACAP ValparaisoDaniel CollaoAún no hay calificaciones
- Trabajo de Capa LimiteDocumento11 páginasTrabajo de Capa LimiteAlonso FarfanAún no hay calificaciones
- Informe Nº4 - Lab Fis 1200 BDocumento8 páginasInforme Nº4 - Lab Fis 1200 BKevin LizarazuAún no hay calificaciones
- Análisis Estructural TeoriaDocumento26 páginasAnálisis Estructural TeoriaJesus MonaguilloAún no hay calificaciones
- Medición de voltaje en circuitos con voltímetroDocumento10 páginasMedición de voltaje en circuitos con voltímetroNUMBASDAún no hay calificaciones
- Sensores Digitales y AnalogicosDocumento8 páginasSensores Digitales y AnalogicosDavid VillamarinAún no hay calificaciones