También podría gustarte
- Aritmetica 2Documento48 páginasAritmetica 2Fabrizzio CayllahuaAún no hay calificaciones
- Guía de Sistema de AcrílicoDocumento12 páginasGuía de Sistema de AcrílicoSebastian ChávezAún no hay calificaciones
- Pme 2019Documento42 páginasPme 2019enidfuentealba966650% (2)
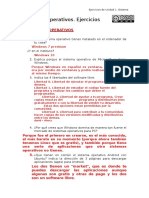
- Ejercicios Sistemas OperativosDocumento7 páginasEjercicios Sistemas OperativosJuan Antonio Muñoz Platero100% (1)
- Barry Long Haciendo El AmorDocumento34 páginasBarry Long Haciendo El Amorfiz1432100% (3)
- Triptico Reciclar Papel - Ariana Diaz C.Documento2 páginasTriptico Reciclar Papel - Ariana Diaz C.Ariana Francesca Diaz CabrejosAún no hay calificaciones
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Hoja de Trabajo - 9 - Espacios Vectoriales-NUEVODocumento2 páginasHoja de Trabajo - 9 - Espacios Vectoriales-NUEVOÁngel Rubén Infante VAún no hay calificaciones
- Sesión 7 - Planos en El Espacio TridimensionalDocumento19 páginasSesión 7 - Planos en El Espacio TridimensionalDiana Estrada ChavezAún no hay calificaciones
- Sesión 7 - Planos en El Espacio TridimensionalDocumento19 páginasSesión 7 - Planos en El Espacio TridimensionalDiana Estrada ChavezAún no hay calificaciones
- Hoja de Trabajo 2 - Sistema de CoordenadasDocumento2 páginasHoja de Trabajo 2 - Sistema de CoordenadasDiana Estrada ChavezAún no hay calificaciones
- Coord y Gráficos de Ec. PolaresDocumento26 páginasCoord y Gráficos de Ec. PolaresDiana Estrada ChavezAún no hay calificaciones
- Sesión 9 - Espacio Vectorial y Sus AplicacionesDocumento24 páginasSesión 9 - Espacio Vectorial y Sus AplicacionesDiana Estrada ChavezAún no hay calificaciones
- Sem 11 - HT - Bases - Cambio de BaseDocumento22 páginasSem 11 - HT - Bases - Cambio de BaseJackeline AlvaradoAún no hay calificaciones
- Hoja de Trabajo 3. Sist. CoordDocumento1 páginaHoja de Trabajo 3. Sist. CoordDiana Estrada ChavezAún no hay calificaciones
- 03.04. Teoriía-Acotación-01Documento12 páginas03.04. Teoriía-Acotación-01Diana Estrada ChavezAún no hay calificaciones
- Hoja Trabajo 11 - Cambio de BaseDocumento2 páginasHoja Trabajo 11 - Cambio de BaseDiana Estrada ChavezAún no hay calificaciones
- Sesión10 - Combinación Lineal - BasesDocumento23 páginasSesión10 - Combinación Lineal - BasesDiana Estrada ChavezAún no hay calificaciones
- Hoja de Trabajo - 10 - Combinaciones Lineales PDFDocumento2 páginasHoja de Trabajo - 10 - Combinaciones Lineales PDFDiana Estrada ChavezAún no hay calificaciones
- Hoja de Trabajo - 14 - Diag - Matrices-T.Cayley HamiltonDocumento1 páginaHoja de Trabajo - 14 - Diag - Matrices-T.Cayley HamiltonDiana Estrada ChavezAún no hay calificaciones
- Sesión14 - Diagonalizacion de MatricesDocumento21 páginasSesión14 - Diagonalizacion de MatricesDiana Estrada ChavezAún no hay calificaciones
- Sesión 3-Sistemas Cilindricas y EsfericasDocumento25 páginasSesión 3-Sistemas Cilindricas y EsfericasCESAR PAREDESAún no hay calificaciones
- Semana 2Documento10 páginasSemana 2JoelAún no hay calificaciones
- AutoCAD 2013-MORENO-Pag.1-37Documento42 páginasAutoCAD 2013-MORENO-Pag.1-37Diana Estrada ChavezAún no hay calificaciones
- 03.04. Teoriía-Acotación-01Documento12 páginas03.04. Teoriía-Acotación-01Diana Estrada ChavezAún no hay calificaciones
- NormasDocumento19 páginasNormasItzaRamirezCarbajalAún no hay calificaciones
- HP Semana 01 Calculo 2 PDFDocumento1 páginaHP Semana 01 Calculo 2 PDFRenatoMalpicaAún no hay calificaciones
- 03.04. Ejercicios-Autocad-Semana 3 PDFDocumento22 páginas03.04. Ejercicios-Autocad-Semana 3 PDFDiana Estrada ChavezAún no hay calificaciones
- Sesion 10Documento19 páginasSesion 10Tulio Guillén SheenAún no hay calificaciones
- Sesion 11Documento15 páginasSesion 11Diana Estrada ChavezAún no hay calificaciones
- 03.04. Ejercicios-Autocad-Semana 3 PDFDocumento22 páginas03.04. Ejercicios-Autocad-Semana 3 PDFDiana Estrada ChavezAún no hay calificaciones
- Sesion 15 PDFDocumento7 páginasSesion 15 PDFDiana Estrada ChavezAún no hay calificaciones
- Sesion 14 PDFDocumento11 páginasSesion 14 PDFDiana Estrada ChavezAún no hay calificaciones
- WEB Plantas Medicinales de Uchucmarca OK PDFDocumento109 páginasWEB Plantas Medicinales de Uchucmarca OK PDFDiana Estrada ChavezAún no hay calificaciones
- Caracteristicas Del Sistema de Tren de Rodaje Rodriguez AldairDocumento2 páginasCaracteristicas Del Sistema de Tren de Rodaje Rodriguez AldairAldair RodriguezAún no hay calificaciones
- P-COR-SIB-03.01-F03 IPERC ContinuoDocumento7 páginasP-COR-SIB-03.01-F03 IPERC ContinuoJuan David BenaventeAún no hay calificaciones
- Sesión Cuatro - TLC - Perú ChinaDocumento93 páginasSesión Cuatro - TLC - Perú ChinaSindy PradoAún no hay calificaciones
- Teorias AdministrativasDocumento15 páginasTeorias AdministrativasSERGIOAún no hay calificaciones
- Perfil de GrupoDocumento42 páginasPerfil de GrupoLiliana Reyes ZamoraAún no hay calificaciones
- Sistema de Inventario de Varios PeríodosDocumento23 páginasSistema de Inventario de Varios PeríodosJulieth Merino50% (2)
- Excel Básico Intermedio y AvanzadoDocumento2 páginasExcel Básico Intermedio y Avanzadomario floresAún no hay calificaciones
- Teoria Poquera JiskapaDocumento72 páginasTeoria Poquera Jiskapaangel chaconAún no hay calificaciones
- Acido Acetico en VinagreDocumento3 páginasAcido Acetico en VinagreJuanse VasquezAún no hay calificaciones
- Hds AcetilenoDocumento6 páginasHds Acetilenonancy toro toroAún no hay calificaciones
- Venezuela EstadosDocumento3 páginasVenezuela EstadossmallviviAún no hay calificaciones
- El Uso de Plaguicidas en Nuestro CultivoDocumento2 páginasEl Uso de Plaguicidas en Nuestro CultivoALEJANDRO WILIAM CCENTE ANTONIOAún no hay calificaciones
- Comunicación ESCRITA UAMDocumento38 páginasComunicación ESCRITA UAMEliEs TralalíAún no hay calificaciones
- Acilos de AncianosDocumento4 páginasAcilos de AncianosLenin GonzalezAún no hay calificaciones
- Representaciones Simbólicas y Algoritmos.: Módulo 3Documento38 páginasRepresentaciones Simbólicas y Algoritmos.: Módulo 3Germarijorie angellique Zi camaraAún no hay calificaciones
- Poesía y Poetica de Leopoldo MarechalDocumento13 páginasPoesía y Poetica de Leopoldo MarechalLuciaAún no hay calificaciones
- Keto Rola CoDocumento5 páginasKeto Rola CoMaricarmen Martínez100% (1)
- Semana 15 - PDF - Formato de Sílabo para El Plan de CapacitaciónDocumento3 páginasSemana 15 - PDF - Formato de Sílabo para El Plan de CapacitaciónFrank SubileteAún no hay calificaciones
- Guias Octavo Segundo Periodo PDocumento7 páginasGuias Octavo Segundo Periodo PDiana Katherine MARTINEZ PAEZAún no hay calificaciones
- Proyecto de Feria de CienciasDocumento16 páginasProyecto de Feria de CienciasJeicko Edgar Aliaga Rojas100% (1)
- Elogio A La Ociosidad y Otros EnsayosDocumento9 páginasElogio A La Ociosidad y Otros Ensayosleo1492Aún no hay calificaciones
- Ultimo IBDocumento55 páginasUltimo IBAdrian Zegarra ConfortiAún no hay calificaciones
- Medicina Basada en EvidenciaDocumento3 páginasMedicina Basada en EvidenciaTania Guadalupe Ramirez NolascoAún no hay calificaciones
- Calculo Hidraulico de Reservorio 13.5 m3Documento4 páginasCalculo Hidraulico de Reservorio 13.5 m3José Eduardo Cruz GómezAún no hay calificaciones