También podría gustarte
- Ade Matemáticas I, Examen 2020, ADocumento2 páginasAde Matemáticas I, Examen 2020, AAna María R. Rogles100% (1)
- Taller Algebra LinealDocumento11 páginasTaller Algebra LinealWullfredo Javier Barco GodoyAún no hay calificaciones
- Microeconomia y Conducta (5ta Edición) PDFDocumento29 páginasMicroeconomia y Conducta (5ta Edición) PDFCharo XfsAún no hay calificaciones
- ECONOMIA I Frank-Microeconomía y Conducta PDFDocumento571 páginasECONOMIA I Frank-Microeconomía y Conducta PDFMamaní Adolfo79% (48)
- ECONOMIA I Frank-Microeconomía y Conducta PDFDocumento571 páginasECONOMIA I Frank-Microeconomía y Conducta PDFMamaní Adolfo79% (48)
- 3ero y 4to - Carpeta de Recuperacion MatematicaDocumento29 páginas3ero y 4to - Carpeta de Recuperacion MatematicaAnonymous bDl76usdva0% (1)
- Sistema de ecuaciones lineales compatible determinadoDocumento6 páginasSistema de ecuaciones lineales compatible determinadoAlexeyAún no hay calificaciones
- UAH - DEPARTAMENTO DE ECONOMÍA - MATEMÁTICAS EMPRESARIALES IIDocumento2 páginasUAH - DEPARTAMENTO DE ECONOMÍA - MATEMÁTICAS EMPRESARIALES IIJorge HuertaAún no hay calificaciones
- Listado3 Algebra2 2023 IDocumento4 páginasListado3 Algebra2 2023 IcontactoAún no hay calificaciones
- Examen Matemáticas I ADE UNED TIPO ADocumento2 páginasExamen Matemáticas I ADE UNED TIPO AVanessa100% (1)
- Septiembre 2016Documento3 páginasSeptiembre 2016martak1207Aún no hay calificaciones
- Guía #7 Sistemas de Ecuaciones e Inecuaciones de Primer GradoDocumento14 páginasGuía #7 Sistemas de Ecuaciones e Inecuaciones de Primer GradoMaría José GómezAún no hay calificaciones
- Tarea ResueltaDocumento3 páginasTarea ResueltaCesarGerardoGuzmanLopezAún no hay calificaciones
- Mesa de Estudio 1Documento3 páginasMesa de Estudio 1Jerson CapuñayAún no hay calificaciones
- Ade Matemáticas I, Examen 2020, BDocumento2 páginasAde Matemáticas I, Examen 2020, BAna María R. Rogles0% (1)
- Practica Matrices Siste DeterDocumento33 páginasPractica Matrices Siste DeterRafael Molina SalazarAún no hay calificaciones
- Sistemas de ecuaciones lineales y determinantesDocumento1 páginaSistemas de ecuaciones lineales y determinantesluisAún no hay calificaciones
- Practica I Parcial - Ma 1022 - I Ciclo 2019Documento4 páginasPractica I Parcial - Ma 1022 - I Ciclo 2019Hector Sánchez CamposAún no hay calificaciones
- TADocumento11 páginasTAsaAún no hay calificaciones
- Sistema de EcuacionesDocumento6 páginasSistema de EcuacionesClaudia RodasAún no hay calificaciones
- Sisitema de Ecuaciones PedroDocumento7 páginasSisitema de Ecuaciones PedroPedro Cuyate100% (2)
- Algebra Febrero17A1Documento2 páginasAlgebra Febrero17A1jonathan41110Aún no hay calificaciones
- Sistemas LinealesDocumento2 páginasSistemas LinealesClaudio AlmarzaAún no hay calificaciones
- Álgebra Examen ResueltosDocumento6 páginasÁlgebra Examen ResueltosPeterAún no hay calificaciones
- Sistemas de ecuaciones lineales con dos incógnitasDocumento9 páginasSistemas de ecuaciones lineales con dos incógnitasRenata Opazo ValdebenitoAún no hay calificaciones
- Eliminación Gaussiana PDFDocumento2 páginasEliminación Gaussiana PDFPedro Manuel Negrete PetroAún no hay calificaciones
- Método - Gradiente ConjugadoDocumento23 páginasMétodo - Gradiente ConjugadoElda TorresAún no hay calificaciones
- Unidad 4 Repasa La Unidad - 2673715Documento1 páginaUnidad 4 Repasa La Unidad - 2673715itziargracia14Aún no hay calificaciones
- Autoevaluación de Estructuras AlgebraicasDocumento7 páginasAutoevaluación de Estructuras Algebraicasinesmorales100% (4)
- Algebra Elemental - ExtractoDocumento20 páginasAlgebra Elemental - ExtractoCésar GarcíaAún no hay calificaciones
- Clase - 10 - PAES M1Documento3 páginasClase - 10 - PAES M1camila1v1squez-1Aún no hay calificaciones
- 1 SistemasDocumento14 páginas1 Sistemascomercialcomercial10 comercialcomercial10Aún no hay calificaciones
- Sol Clase - 10 - PAES M1 - 220901 - 115004Documento3 páginasSol Clase - 10 - PAES M1 - 220901 - 115004camila1v1squez-1Aún no hay calificaciones
- PARCIAL AlgebraDocumento1 páginaPARCIAL AlgebraYenifer QuintanaAún no hay calificaciones
- ÁLGEBRA LINEAL Libro de Trabajs y Guía Didáctica Del Docente 10Documento1 páginaÁLGEBRA LINEAL Libro de Trabajs y Guía Didáctica Del Docente 10mmejia_lothAún no hay calificaciones
- 2018 GAP EneroDocumento5 páginas2018 GAP EneroLeo EgidoAún no hay calificaciones
- Ay2 PautaDocumento5 páginasAy2 PautaMartin Alejandro Ayala QueipulAún no hay calificaciones
- 251 Pdfsam Matematicas-I TodoDocumento50 páginas251 Pdfsam Matematicas-I TodoRony Montejo SolisAún no hay calificaciones
- Listado7 525020Documento3 páginasListado7 525020leandro bravoAún no hay calificaciones
- PrimerParcialAlgebra2020-2021 - SolucionesDocumento3 páginasPrimerParcialAlgebra2020-2021 - SolucionesLuis Moreno PérezAún no hay calificaciones
- Algebra 0.2Documento10 páginasAlgebra 0.2RubenAún no hay calificaciones
- Teoría - Unidad 6-2c-2020Documento7 páginasTeoría - Unidad 6-2c-2020フランク.Aún no hay calificaciones
- La Rioja Matematicas-2018 SolcDocumento9 páginasLa Rioja Matematicas-2018 SolcRebeca lanauAún no hay calificaciones
- Sistema lineal homogéneo dimensión ceroDocumento5 páginasSistema lineal homogéneo dimensión ceroOrochi SuarezAún no hay calificaciones
- Ejercicios Semana 1 (Solo 3)Documento3 páginasEjercicios Semana 1 (Solo 3)Dayana GomezAún no hay calificaciones
- Problemas Tema 1 2324-1Documento4 páginasProblemas Tema 1 2324-1Tatiana Barros MihovichAún no hay calificaciones
- Septiembre 23Documento6 páginasSeptiembre 23Alexandra RodriguezAún no hay calificaciones
- Tarea III - Algebra Lineal II: Presentado Al ProfesorDocumento7 páginasTarea III - Algebra Lineal II: Presentado Al ProfesorBart MaxAún no hay calificaciones
- Sistema ecuaciones linealesDocumento3 páginasSistema ecuaciones linealescarlos ruizAún no hay calificaciones
- 3 Sistemas SolDocumento11 páginas3 Sistemas Solsc5fjj46q5Aún no hay calificaciones
- 2020 Junio Examen y Solucion 1Documento5 páginas2020 Junio Examen y Solucion 1PeterAún no hay calificaciones
- Sistemas de ecuaciones linealesDocumento6 páginasSistemas de ecuaciones linealesJorgeAún no hay calificaciones
- Solucionario Del Examen de Simulación COLBACH v. 5 (Matemáticas y Ciencias Experimentales)Documento23 páginasSolucionario Del Examen de Simulación COLBACH v. 5 (Matemáticas y Ciencias Experimentales)Alembert VasquezAún no hay calificaciones
- AM1-ECEN-2020-Practica1 (Complementaria)Documento1 páginaAM1-ECEN-2020-Practica1 (Complementaria)erikAún no hay calificaciones
- Paper Analisis Lazo CerradoDocumento19 páginasPaper Analisis Lazo CerradoYuarth HernándezAún no hay calificaciones
- Examen Segundo Ciclo Uam-1Documento8 páginasExamen Segundo Ciclo Uam-1marcos christian lupa cabreraAún no hay calificaciones
- Ejercicios Preparatorios Quiz 1Documento2 páginasEjercicios Preparatorios Quiz 1thoroidAún no hay calificaciones
- Algebra Septiembre18ADocumento3 páginasAlgebra Septiembre18AHaritz Adrián ServeraAún no hay calificaciones
- T1alg2020Documento12 páginasT1alg2020Felipe Chaves DelgadilloAún no hay calificaciones
- Guia 3 Medio PDFDocumento8 páginasGuia 3 Medio PDFMiguel BustosAún no hay calificaciones
- 3° Medio PDFDocumento8 páginas3° Medio PDFMiguel BustosAún no hay calificaciones
- Algebra y Geometría Analítica Examen Final Problemas y Conceptos ClaveDocumento1 páginaAlgebra y Geometría Analítica Examen Final Problemas y Conceptos ClaveSara GuzmannAún no hay calificaciones
- Glosario Tema 1Documento2 páginasGlosario Tema 1Antonio OteroAún no hay calificaciones
- Examen DDocumento2 páginasExamen DCharo XfsAún no hay calificaciones
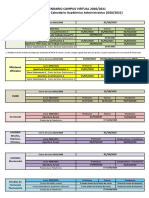
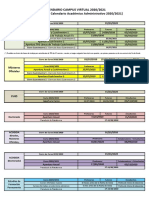
- 2020 Calendario Campus Virtual 2020 2021Documento1 página2020 Calendario Campus Virtual 2020 2021david ballesterosAún no hay calificaciones
- Guia Apoyo Emocional PDFDocumento20 páginasGuia Apoyo Emocional PDFCharo XfsAún no hay calificaciones
- CalendarioCampusVirtual2020 2021Documento1 páginaCalendarioCampusVirtual2020 2021Charo XfsAún no hay calificaciones
- Ley de Función Pública de Galicia PDFDocumento96 páginasLey de Función Pública de Galicia PDFCharo XfsAún no hay calificaciones
- Web Racef Ses Minsk m43 16 0 PDFDocumento170 páginasWeb Racef Ses Minsk m43 16 0 PDFCharo XfsAún no hay calificaciones
- Materiales básicos para cursos de acuarelaDocumento1 páginaMateriales básicos para cursos de acuarelaCharo XfsAún no hay calificaciones
- Tamaño Mínimo EspeciesDocumento7 páginasTamaño Mínimo EspeciesCharo XfsAún no hay calificaciones
- Id Asignatura 65902015Documento8 páginasId Asignatura 65902015Alejandro Valverde SacristánAún no hay calificaciones
- Ladylike: by DROPS DesignDocumento4 páginasLadylike: by DROPS DesignCharo XfsAún no hay calificaciones
- OBJETIVOS Tema2 - DEMANDADocumento1 páginaOBJETIVOS Tema2 - DEMANDACharo XfsAún no hay calificaciones
- 31448017-Erratas+libro+ej++2016-17 9 1 17Documento1 página31448017-Erratas+libro+ej++2016-17 9 1 17Charo XfsAún no hay calificaciones
- Giddens El Capitalismo y La Moderna Teoria SocialDocumento11 páginasGiddens El Capitalismo y La Moderna Teoria SocialCharo XfsAún no hay calificaciones
- Giddens El Capitalismo y La Moderna Teoria SocialDocumento247 páginasGiddens El Capitalismo y La Moderna Teoria SocialJose Maria JoseAún no hay calificaciones
- Rinconete y Cortadillo EbookDocumento43 páginasRinconete y Cortadillo EbookCharo XfsAún no hay calificaciones
- Barthes - Existe Una Escritura Poética PDFDocumento7 páginasBarthes - Existe Una Escritura Poética PDFCharo XfsAún no hay calificaciones
- Comentario Estilistico de Un Soneto de QuevedoPDF PDFDocumento16 páginasComentario Estilistico de Un Soneto de QuevedoPDF PDFCharo XfsAún no hay calificaciones
- Lengua JeDocumento16 páginasLengua JeSantiago FongAún no hay calificaciones
- Guia Del Curso 2008-09Documento118 páginasGuia Del Curso 2008-09Charo XfsAún no hay calificaciones
- Manual de Estilo-UnedDocumento154 páginasManual de Estilo-UnedTomás Pavón Rubio100% (5)
- Sistemas Lineales Métodos ComputacionalesDocumento3 páginasSistemas Lineales Métodos ComputacionalesAndres RaggiAún no hay calificaciones
- Actividad ColaborativaDocumento34 páginasActividad ColaborativaTatiana LlanosAún no hay calificaciones
- Algebra Lineal CuadernilloDocumento42 páginasAlgebra Lineal CuadernilloLuis Garcia PuenteAún no hay calificaciones
- Examen Parcial 2011-IiDocumento2 páginasExamen Parcial 2011-IiGabriel Andrés PLAún no hay calificaciones
- Sistemas de ecuaciones linealesDocumento23 páginasSistemas de ecuaciones linealesoscar yepesAún no hay calificaciones
- PDC 4TO DE SEC 2021 CBBB LUIS TORRES Ok DirectoraDocumento28 páginasPDC 4TO DE SEC 2021 CBBB LUIS TORRES Ok DirectoraMATABIDON BUENOAún no hay calificaciones
- Algebra 2Documento26 páginasAlgebra 2Camila HermosillaAún no hay calificaciones
- Práctica 4 MNDocumento3 páginasPráctica 4 MNAdrian HernandezAún no hay calificaciones
- Control DigitalDocumento17 páginasControl DigitalAlejandro A MejiasAún no hay calificaciones
- Tarea 2 - Grupo 112Documento37 páginasTarea 2 - Grupo 112Kt SanTamaríaAún no hay calificaciones
- Tarea 3Documento2 páginasTarea 3JEIMY DANIELA SEGUNDO BUSTOSAún no hay calificaciones
- 1.2 Determinantes e Inversa Por AdjuntaDocumento10 páginas1.2 Determinantes e Inversa Por Adjuntachuy juarezAún no hay calificaciones
- Ecuaciones Diferenciales II - Sistemas LinealesDocumento4 páginasEcuaciones Diferenciales II - Sistemas LinealesjantomoralesAún no hay calificaciones
- 3 MatricesDocumento32 páginas3 MatricesSergio BarbozaAún no hay calificaciones
- 100000A07D MatematicaParaLosNegociosIDocumento6 páginas100000A07D MatematicaParaLosNegociosIAlx JessyAún no hay calificaciones
- Resuelve sistemas ecuaciones 2x2 métodos eliminación y determinantesDocumento6 páginasResuelve sistemas ecuaciones 2x2 métodos eliminación y determinantesHENRRY ESPINELAún no hay calificaciones
- Simulacro 2008Documento3 páginasSimulacro 2008Clases ParticularesAún no hay calificaciones
- SISTEMA DE ECUACIONES LINEALES (Recuperado) v3Documento12 páginasSISTEMA DE ECUACIONES LINEALES (Recuperado) v3Juan GarcíaAún no hay calificaciones
- 10.1 Ejercicios 1-37 Cecilio Alcivar CamposDocumento34 páginas10.1 Ejercicios 1-37 Cecilio Alcivar CamposKevin MazziniAún no hay calificaciones
- Inecuaciones IIDocumento26 páginasInecuaciones IILuis Angel Valencia LunaAún no hay calificaciones
- Manual de AlgebraDocumento136 páginasManual de AlgebraSoledad EleftheriouAún no hay calificaciones
- Clase N°10Documento8 páginasClase N°10RuizCesarAún no hay calificaciones
- UTN TP N°3 ResoluciónDocumento5 páginasUTN TP N°3 ResoluciónCamila MuñozAún no hay calificaciones
- Soluciones Selectividad. Estudio de Sistemas Con Parametros CCDocumento66 páginasSoluciones Selectividad. Estudio de Sistemas Con Parametros CCmadenive6054Aún no hay calificaciones
- Método Algebraico de DeterminantesDocumento3 páginasMétodo Algebraico de DeterminantesJefferson Paul Tarapues CandoAún no hay calificaciones
- 2-Ejercicios Sistemas Lineales-SolucionesDocumento5 páginas2-Ejercicios Sistemas Lineales-SolucionesJose Mario100% (2)
- Tarea 5 AlgebraDocumento11 páginasTarea 5 AlgebraJuan HurtadoAún no hay calificaciones
- 06 Enunciados SELSoluciones3x3Documento11 páginas06 Enunciados SELSoluciones3x3Camilo Andres BayonaAún no hay calificaciones
- Unidad 3 Respuesta DinamicaDocumento17 páginasUnidad 3 Respuesta DinamicaJose AmbrocioAún no hay calificaciones