También podría gustarte
- Pareto (2951)Documento8 páginasPareto (2951)Stalin NarvaezAún no hay calificaciones
- 5to Principio deDocumento4 páginas5to Principio deStalin NarvaezAún no hay calificaciones
- Deber Normas IsoDocumento2 páginasDeber Normas IsoStalin NarvaezAún no hay calificaciones
- Herramientas de La Calidad (2941)Documento10 páginasHerramientas de La Calidad (2941)Stalin NarvaezAún no hay calificaciones
- Las Herramientas de La CaliadadDocumento10 páginasLas Herramientas de La CaliadadStalin NarvaezAún no hay calificaciones
- Constitucion de Maquinas Eléctricas PDFDocumento20 páginasConstitucion de Maquinas Eléctricas PDFPierina100% (1)
- Deber2 MicroprocesadoresDocumento6 páginasDeber2 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- Deber6 MicroprocesadoresDocumento8 páginasDeber6 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- Acuerdo Medios Electronicos (Calderon Merino Paola Jacqueline) PDFDocumento3 páginasAcuerdo Medios Electronicos (Calderon Merino Paola Jacqueline) PDFPao CalderónAún no hay calificaciones
- Hoja de Datos - gr9Documento6 páginasHoja de Datos - gr9Stalin NarvaezAún no hay calificaciones
- Deber2 MicroprocesadoresDocumento6 páginasDeber2 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- Deber5 MicroprocesadoresDocumento10 páginasDeber5 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- Deber9 MicroprocesadoresDocumento5 páginasDeber9 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- Deber3 MicroprocesadoresDocumento2 páginasDeber3 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- Deber4 NarvaezDocumento2 páginasDeber4 NarvaezStalin NarvaezAún no hay calificaciones
- Deber2 MicroprocesadoresDocumento6 páginasDeber2 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- Fundamentos de Calidad Total PDFDocumento276 páginasFundamentos de Calidad Total PDFAlberto Alberto Felix TiradoAún no hay calificaciones
- Deber3 MicroprocesadoresDocumento2 páginasDeber3 MicroprocesadoresStalin NarvaezAún no hay calificaciones
- FodaDocumento6 páginasFodaStalin NarvaezAún no hay calificaciones
- Preparatorio 1Documento6 páginasPreparatorio 1Stalin NarvaezAún no hay calificaciones
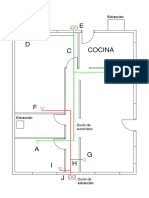
- Diagrama Unifilar PDFDocumento1 páginaDiagrama Unifilar PDFStalin NarvaezAún no hay calificaciones
- INFORME 6 Maquinas ElectricasDocumento4 páginasINFORME 6 Maquinas ElectricasStalin NarvaezAún no hay calificaciones
- Deber3 Narvaez Stalin PDFDocumento1 páginaDeber3 Narvaez Stalin PDFStalin NarvaezAún no hay calificaciones
- Calidad TotalDocumento10 páginasCalidad TotalStalin NarvaezAún no hay calificaciones
- Informe#2Documento8 páginasInforme#2Stalin NarvaezAún no hay calificaciones
- Informe 4 Maquinas ElectricasDocumento7 páginasInforme 4 Maquinas ElectricasStalin NarvaezAún no hay calificaciones
- Informe Maquinas EléctricasDocumento4 páginasInforme Maquinas EléctricasStalin NarvaezAún no hay calificaciones
- Informe Maquinas EléctricasDocumento4 páginasInforme Maquinas EléctricasStalin NarvaezAún no hay calificaciones
- Analisis de Riesgos Proyecto VeneciaDocumento27 páginasAnalisis de Riesgos Proyecto VeneciaWincy PaezAún no hay calificaciones
- Guia 2 Experimentacion Fisica, UnivalleDocumento5 páginasGuia 2 Experimentacion Fisica, UnivalleDaniel LopezAún no hay calificaciones
- Variacion Linguistica en El Español de CubaDocumento206 páginasVariacion Linguistica en El Español de CubaDavid MitraniAún no hay calificaciones
- Riñón 3Documento26 páginasRiñón 3Rodrigo S. AvilésAún no hay calificaciones
- Solicitud de Acciones de Edificacion FRENTE Y REVERSO 02-2016Documento2 páginasSolicitud de Acciones de Edificacion FRENTE Y REVERSO 02-2016Jose Garcia100% (1)
- Taller Matemáticas - ULTIMODocumento7 páginasTaller Matemáticas - ULTIMONataly EspinelAún no hay calificaciones
- Encuentro CPHS ACHS 2019Documento54 páginasEncuentro CPHS ACHS 2019marioAún no hay calificaciones
- Conducción de Calor en Estado EstacionarioDocumento5 páginasConducción de Calor en Estado EstacionarioCruz Rojas CristinaAún no hay calificaciones
- Intercambio Con Un Ingles PDFDocumento24 páginasIntercambio Con Un Ingles PDFEugenia Quintero0% (2)
- Geopolitica Samuel Marquez SectorEDocumento33 páginasGeopolitica Samuel Marquez SectorESamuel MarquezAún no hay calificaciones
- 05 Legajo Medico - Luis ValdiviaDocumento27 páginas05 Legajo Medico - Luis ValdiviaAlex Huaman AyalaAún no hay calificaciones
- 01 - EETT - Obras Provisionales y Preliminares - Rev 0Documento18 páginas01 - EETT - Obras Provisionales y Preliminares - Rev 0Çs LeonelAún no hay calificaciones
- AlfalfasDocumento3 páginasAlfalfasYSAIASAún no hay calificaciones
- ProrrateoDocumento3 páginasProrrateoJoselyn KuffoAún no hay calificaciones
- Thalia MamografiaExiste Cuando Las Actitudes de Una Persona Hacia La Comida y El PesoDocumento19 páginasThalia MamografiaExiste Cuando Las Actitudes de Una Persona Hacia La Comida y El PesoJeanpier Vera JaureguiAún no hay calificaciones
- Biblia de He Man Michael Halperin 1982Documento24 páginasBiblia de He Man Michael Halperin 1982Mark BonsAún no hay calificaciones
- Revista Trafico y Seguridad Vial Numero 210 CompletaDocumento68 páginasRevista Trafico y Seguridad Vial Numero 210 Completaenzo7259Aún no hay calificaciones
- Cancer PancreasDocumento9 páginasCancer Pancreassheccid100% (2)
- Ficha CCNN Fuerzas Que Actuan Sobre Objetos EstaticosDocumento3 páginasFicha CCNN Fuerzas Que Actuan Sobre Objetos EstaticosJordy Toala100% (1)
- Contribución Al Sencico - Beneficios - Carreras y EmpleabilidadDocumento83 páginasContribución Al Sencico - Beneficios - Carreras y EmpleabilidadPLANILLASAún no hay calificaciones
- El ExistencialismoDocumento2 páginasEl ExistencialismoRebeca GarciaAún no hay calificaciones
- Plan La Barra (Vers Preliminar)Documento113 páginasPlan La Barra (Vers Preliminar)Jimmy Montaño CarabaliAún no hay calificaciones
- 15.herramientas ManualesDocumento2 páginas15.herramientas ManualesAsterixAún no hay calificaciones
- Investigación CinematicaDocumento13 páginasInvestigación CinematicaRODRÍGUEZ ARCIGA DIEGOAún no hay calificaciones
- Doce Cuentos Peregrinos - Control de Lectura - Fila C 2018Documento4 páginasDoce Cuentos Peregrinos - Control de Lectura - Fila C 2018Volatile SlothAún no hay calificaciones
- Memoria 21 2021Documento52 páginasMemoria 21 2021Raúl Huerta FernándezAún no hay calificaciones
- Crema de Calabaza - Receta Fácil y RápidaDocumento9 páginasCrema de Calabaza - Receta Fácil y Rápidasergio calfuAún no hay calificaciones
- Taller Alcanos Ramificados y Cíclicos Ciclo ViDocumento3 páginasTaller Alcanos Ramificados y Cíclicos Ciclo Vi30022186840% (1)
- Estudio de Los Componentes Bioquimicos de La BrevaDocumento18 páginasEstudio de Los Componentes Bioquimicos de La BrevaAlfonso Jordan JaramilloAún no hay calificaciones
- Presentacion - Revenue ManagementDocumento12 páginasPresentacion - Revenue ManagementwebinarAún no hay calificaciones