También podría gustarte
- Medidas de Tendencia CentralDocumento8 páginasMedidas de Tendencia CentralRobinsonGermánIndalecioAún no hay calificaciones
- Pasos para Elaborar El Círculo de MohrDocumento8 páginasPasos para Elaborar El Círculo de Mohritzael vegaAún no hay calificaciones
- Cap 5 Total PDFDocumento135 páginasCap 5 Total PDFCarlos Pulache OrdoñezAún no hay calificaciones
- Taller 13-11-20Documento1 páginaTaller 13-11-20itpAún no hay calificaciones
- Taller Circulo de MohrDocumento4 páginasTaller Circulo de MohrJuan Aristizabal100% (1)
- Estática Examen Práctica 1 - ResueltoDocumento6 páginasEstática Examen Práctica 1 - Resueltorene100% (2)
- TorsionDocumento32 páginasTorsionAlexAún no hay calificaciones
- Práctica Dirigida de Torsión N°2Documento7 páginasPráctica Dirigida de Torsión N°2david castillo riveraAún no hay calificaciones
- Solucionario Del Examen ParcialDocumento27 páginasSolucionario Del Examen Parcialkilder kenio Mallqui AguilarAún no hay calificaciones
- Problema N°3: B A D y x ω =0.3rad/sDocumento2 páginasProblema N°3: B A D y x ω =0.3rad/sJose Carlos Valdivia GonzalesAún no hay calificaciones
- EJERCICIO 5y6Documento3 páginasEJERCICIO 5y6paul caicayAún no hay calificaciones
- Ejercicios Exposicion HibblerDocumento1 páginaEjercicios Exposicion HibblerBryan ChavezAún no hay calificaciones
- Esfuerzos en VigasDocumento10 páginasEsfuerzos en VigasALCIDES LUIS FABIAN BRA�EZAún no hay calificaciones
- Problema #11Documento3 páginasProblema #11PruteenAún no hay calificaciones
- Trabajo Encargado de Dinamica Linial y CircularDocumento11 páginasTrabajo Encargado de Dinamica Linial y CircularAlexander Mamani BernabeAún no hay calificaciones
- Cap 3 TotalDocumento55 páginasCap 3 TotalCarlos Pulache OrdoñezAún no hay calificaciones
- Tensiones Geoestáticas - TeoriaDocumento23 páginasTensiones Geoestáticas - TeoriaJoel ManriqueAún no hay calificaciones
- Ejercicio Meriam 3ra Ed 1.115Documento7 páginasEjercicio Meriam 3ra Ed 1.115CristianAndresAún no hay calificaciones
- PD4Documento4 páginasPD4Elton Martinez50% (2)
- Tensiones Combinadas+columnasDocumento40 páginasTensiones Combinadas+columnasJose AñazcoAún no hay calificaciones
- Informe de Lectura 1.1. Estado General de Esfuerzos Planos y Estado de Esfuerzos PrincipalesDocumento4 páginasInforme de Lectura 1.1. Estado General de Esfuerzos Planos y Estado de Esfuerzos Principalesmiguel907gtrAún no hay calificaciones
- Ejercicio 4.112 - Nathali Castro AriasDocumento9 páginasEjercicio 4.112 - Nathali Castro AriasNathali Castro AriasAún no hay calificaciones
- Ejercicios de M.fluidosDocumento5 páginasEjercicios de M.fluidosRoyer David Llanos MarinAún no hay calificaciones
- Exposición Ejercicio de Aplicación Cargas de Impacto Exposición PDFDocumento6 páginasExposición Ejercicio de Aplicación Cargas de Impacto Exposición PDFjorge_capri_97Aún no hay calificaciones
- Trabajo de Fluidos 2Documento2 páginasTrabajo de Fluidos 2Monica Taipe UrribarriAún no hay calificaciones
- EJERCICO01Documento2 páginasEJERCICO01WILDER CHINCHAY CRUZAún no hay calificaciones
- Estabilidad de Taludes en Suelos Geot Vial 14 Parte 2Documento47 páginasEstabilidad de Taludes en Suelos Geot Vial 14 Parte 2John Paul Farfan ChavezAún no hay calificaciones
- TrabajoDocumento2 páginasTrabajoGiancarlo Enciso CarpioAún no hay calificaciones
- Preparadores FyQ Curso 20-21 Clase 25 MAS y Ondas IDocumento4 páginasPreparadores FyQ Curso 20-21 Clase 25 MAS y Ondas IJosse BPAún no hay calificaciones
- Cálculo de Empujes y Muro MensulaDocumento17 páginasCálculo de Empujes y Muro MensulaindeagroAún no hay calificaciones
- Trabajo Autonomo 1 2020-D1Documento1 páginaTrabajo Autonomo 1 2020-D1Luis Miguel León PeraltaAún no hay calificaciones
- Problemas Resueltos Grupo 1Documento7 páginasProblemas Resueltos Grupo 1Shantal QuispeAún no hay calificaciones
- Deflexion de Vigas 2Documento6 páginasDeflexion de Vigas 2Agustin Machado0% (1)
- Tarea de Solidos 1 (Oct2014-Febr2015)Documento6 páginasTarea de Solidos 1 (Oct2014-Febr2015)Darwin Rafael0% (2)
- Flexion 2021Documento36 páginasFlexion 2021Rafael QuevedoAún no hay calificaciones
- Excel Por Pendiente DeflexionDocumento24 páginasExcel Por Pendiente DeflexionAlexander ApAún no hay calificaciones
- Ejercicio 1 y 3Documento6 páginasEjercicio 1 y 3Doko BitoAún no hay calificaciones
- Ae1 2018 - Ii Clase Tema 05 A1 - B1 - B2Documento2 páginasAe1 2018 - Ii Clase Tema 05 A1 - B1 - B2MARCOS JOSUE RUPAY VARGAS0% (1)
- Actividad #6 R1GSDocumento1 páginaActividad #6 R1GSJuan Sebastian SalinasAún no hay calificaciones
- Portafolio Segunda Unidad DinamicaDocumento10 páginasPortafolio Segunda Unidad DinamicaAlexandra Reyes VasquezAún no hay calificaciones
- Problemas de ImpactoDocumento3 páginasProblemas de ImpactoNator17Aún no hay calificaciones
- Ejercicios Propuestos Sesión N° 2Documento13 páginasEjercicios Propuestos Sesión N° 2Julio JpAún no hay calificaciones
- Taller 03-U1 - Tipo ADocumento2 páginasTaller 03-U1 - Tipo ABrunno Bernaola riveraAún no hay calificaciones
- Resistencia de Materiales 1 UNFV Pc1 2018-1Documento6 páginasResistencia de Materiales 1 UNFV Pc1 2018-1Evy Alvarado100% (1)
- Trabajo de MateDocumento13 páginasTrabajo de MateGonzalo Chauca AguirreAún no hay calificaciones
- Prob 3.21 Cortante Max RevDocumento1 páginaProb 3.21 Cortante Max RevSamuel DelgadoAún no hay calificaciones
- Práctica S03 DinámicaDocumento8 páginasPráctica S03 DinámicaJuan Diego Castro ArévaloAún no hay calificaciones
- Ejemplo 1: Determinar Los Diagramas de Fuerza Normal, Fuerza Cortante y Momento Flector para El Siguiente PórticoDocumento40 páginasEjemplo 1: Determinar Los Diagramas de Fuerza Normal, Fuerza Cortante y Momento Flector para El Siguiente PórticoAngie Araceli Zavala SalinasAún no hay calificaciones
- Mec - Fluidos - Clase3.3Documento29 páginasMec - Fluidos - Clase3.3brunella rhAún no hay calificaciones
- Solucionario Del Segundo Examen de Rm1Documento7 páginasSolucionario Del Segundo Examen de Rm1Wilfredo BizarroAún no hay calificaciones
- Viscosidad FluidosDocumento25 páginasViscosidad FluidosLauroArandaMacedoAún no hay calificaciones
- Tecnologia de MaterialesDocumento14 páginasTecnologia de MaterialesWILLY ALVARO RODRIGUEZ CHAVEZAún no hay calificaciones
- Ejercicios DinamicaDocumento10 páginasEjercicios DinamicaEleonaiAún no hay calificaciones
- ENSAYO DE TRACCIÓN - Secc. D, Grupo 05Documento12 páginasENSAYO DE TRACCIÓN - Secc. D, Grupo 05Veroniek PaAún no hay calificaciones
- Formulas Curso Resistencia de MaterialesDocumento2 páginasFormulas Curso Resistencia de Materialesjuan camilo100% (1)
- ENVIO 2021 - InicialDocumento5 páginasENVIO 2021 - InicialKIESER DE LA PEÑA GASPARAún no hay calificaciones
- 11 ExcentricidadesDocumento40 páginas11 ExcentricidadesLEIDY VIVIANA GUTIERREZ GALINDOAún no hay calificaciones
- 75Documento9 páginas75GA EynerAún no hay calificaciones
- Diseño Sismico Basado en Desplazamientos - DBDDocumento301 páginasDiseño Sismico Basado en Desplazamientos - DBDValentina RamirezAún no hay calificaciones
- 3 PosterDocumento1 página3 PosterValentina RamirezAún no hay calificaciones
- Resumen Tabla para Técnicas de IntegraciónDocumento2 páginasResumen Tabla para Técnicas de IntegraciónValentina RamirezAún no hay calificaciones
- Ej2 - ValentinaRamirez-2 PDFDocumento1 páginaEj2 - ValentinaRamirez-2 PDFValentina RamirezAún no hay calificaciones
- Resumen Tabla para Técnicas de Integración PDFDocumento2 páginasResumen Tabla para Técnicas de Integración PDFValentina RamirezAún no hay calificaciones
- TABLA DE DERIVADAS E INTEGRALES (Stewart)Documento2 páginasTABLA DE DERIVADAS E INTEGRALES (Stewart)Valentina Ramirez100% (1)
- Unefa Diseno de Mezclas ConcretoDocumento22 páginasUnefa Diseno de Mezclas ConcretopiangereAún no hay calificaciones
- Guía para Visitar Un Museo ECA Proyecto 5 Semana 3Documento9 páginasGuía para Visitar Un Museo ECA Proyecto 5 Semana 3Henry VillamarAún no hay calificaciones
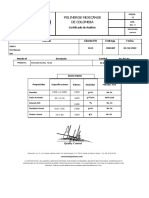
- Certicado de Calidad de Materia PrimaDocumento3 páginasCerticado de Calidad de Materia PrimaEDUAR ENRIQUE RIOS VEGAAún no hay calificaciones
- Concepto y Funciones Del Área de Recursos HumanosDocumento3 páginasConcepto y Funciones Del Área de Recursos Humanosjohn_722Aún no hay calificaciones
- Quiz Oferta y DemandaDocumento26 páginasQuiz Oferta y DemandaJUAN JOSE SALAZAR GRISALESAún no hay calificaciones
- ETSIAE RMyE 1516 RM P19-P30Documento8 páginasETSIAE RMyE 1516 RM P19-P30ShalafichgAún no hay calificaciones
- Caso Erin Brockovich Una Mujer AudazDocumento3 páginasCaso Erin Brockovich Una Mujer AudazLuciano Gallardo SócolaAún no hay calificaciones
- Arquitectura Educacional y Hospitalaria en MexicoDocumento4 páginasArquitectura Educacional y Hospitalaria en MexicoJOSUE OSWALDO RIOS CRUZAún no hay calificaciones
- Ejercicios N3Documento2 páginasEjercicios N3Anthony PerezAún no hay calificaciones
- Perfil Cargo - PresidenteDocumento1 páginaPerfil Cargo - PresidenteAsesorias PsicoFile33% (3)
- Libro Tecn. Concreto IDocumento68 páginasLibro Tecn. Concreto IEDGAR TOCTO FLORESAún no hay calificaciones
- Foro Virtual Mitos, Malentendidos Supervisión TécnicaDocumento30 páginasForo Virtual Mitos, Malentendidos Supervisión TécnicaDavid RamirezAún no hay calificaciones
- Proyecto Modular Derecho Mercantil IDocumento14 páginasProyecto Modular Derecho Mercantil IGABRIELAún no hay calificaciones
- Trabajo Patricia Canelón 2019Documento109 páginasTrabajo Patricia Canelón 2019Ludovina PantojasAún no hay calificaciones
- Primera Parte de La TesisDocumento7 páginasPrimera Parte de La TesisMilton Antonio Cruz DávilaAún no hay calificaciones
- Taller de Tesis Gina SolorzanoDocumento40 páginasTaller de Tesis Gina SolorzanoGINA GRISELY SOLORZANO BURGOSAún no hay calificaciones
- Clase 06 ESTDocumento23 páginasClase 06 ESTMartin50% (2)
- Rolando CcamaDocumento13 páginasRolando CcamaRolo CcAún no hay calificaciones
- Aca 1 - Contabilidad GubernamentalDocumento5 páginasAca 1 - Contabilidad GubernamentalWilliam Alexander HernandezAún no hay calificaciones
- Embarazo y EpilepsiaDocumento12 páginasEmbarazo y EpilepsiaJose CornejoAún no hay calificaciones
- Taller 8 Congruencia TriangulosDocumento6 páginasTaller 8 Congruencia TriangulosAdrian Camilo Mora LopezAún no hay calificaciones
- Mina Media LunaDocumento26 páginasMina Media Lunalemofo9898Aún no hay calificaciones
- Ciudad UtopicaDocumento2 páginasCiudad UtopicaYuriAún no hay calificaciones
- Parada - Calabacito - 2020Documento1 páginaParada - Calabacito - 2020INGCESA PANAMAAún no hay calificaciones
- Cómo Desmontar Compaq Presario M2000 PortátilDocumento19 páginasCómo Desmontar Compaq Presario M2000 Portátilburdiles100% (1)
- Clase 4.4 - Función LinealDocumento30 páginasClase 4.4 - Función LinealCourse hero1Aún no hay calificaciones
- Trabajo Unidad 1 Cadenas de SuministroDocumento27 páginasTrabajo Unidad 1 Cadenas de SuministroJose Rodrigo Ramires SanchezAún no hay calificaciones
- 1 Convocatoria Estudiantes Prope 2-2021Documento1 página1 Convocatoria Estudiantes Prope 2-2021Anónimo LatinoamericaAún no hay calificaciones
- Inversiones S&LDocumento7 páginasInversiones S&Ldel valleAún no hay calificaciones
- Bases Limpieza 2023 Integradas 20230719 174831 559Documento110 páginasBases Limpieza 2023 Integradas 20230719 174831 559Yorwi Eder Yanez FernandezAún no hay calificaciones