También podría gustarte
- Curso Common Rail Sistemas BoschDocumento57 páginasCurso Common Rail Sistemas BoschJunior BerrioAún no hay calificaciones
- 01-Que Es La TrinidadDocumento9 páginas01-Que Es La TrinidadCarlosAndresBayonaVillarrealAún no hay calificaciones
- Procedimiento de Mantenimiento de Equipos y MáquinasDocumento6 páginasProcedimiento de Mantenimiento de Equipos y MáquinasDaniela G100% (1)
- Etapas de La ParejaDocumento5 páginasEtapas de La ParejaMariana FigueroaAún no hay calificaciones
- Tipos de Sociedades Mercantiles en MéxicoDocumento3 páginasTipos de Sociedades Mercantiles en MéxicoRodrigo de la Cruz100% (2)
- Español, Cartilla 1, Cuarto PDFDocumento96 páginasEspañol, Cartilla 1, Cuarto PDFCamila Rincón PlazasAún no hay calificaciones
- Ligotti Thomas - La Torre RojaDocumento11 páginasLigotti Thomas - La Torre RojaMidnight_12100% (1)
- Autorizacion de Extraccion de Materiales Acarreo 2013Documento31 páginasAutorizacion de Extraccion de Materiales Acarreo 2013Álvaro Vargas RodríguezAún no hay calificaciones
- La Historia de La EternidadDocumento3 páginasLa Historia de La EternidadJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Evaluacion 22-07-20Documento2 páginasEvaluacion 22-07-20Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Informe de Calor Especifico DocxDocumento10 páginasInforme de Calor Especifico DocxVICTORIA EUGENIA MENA RUIZAún no hay calificaciones
- Problema 06Documento2 páginasProblema 06Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Problema 05 PDFDocumento3 páginasProblema 05 PDFJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Problema 07 PDFDocumento4 páginasProblema 07 PDFJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Cuestionario y Ejersicios Soriano Gonzalez Jorge E.Documento24 páginasCuestionario y Ejersicios Soriano Gonzalez Jorge E.Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Notas 08 PDFDocumento4 páginasNotas 08 PDFJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Notas 12Documento14 páginasNotas 12Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- ExamenDocumento1 páginaExamenJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Notas 10Documento3 páginasNotas 10Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Notas 10Documento3 páginasNotas 10Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- FísicaDocumento28 páginasFísicaOmsa OmsaAún no hay calificaciones
- Notas 11Documento5 páginasNotas 11Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Notas 11Documento5 páginasNotas 11Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- RodriguezMujer 1Documento5 páginasRodriguezMujer 1MathiasAltinaAún no hay calificaciones
- Notas 08 PDFDocumento4 páginasNotas 08 PDFJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Notas 07Documento4 páginasNotas 07Jorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Act 1 MetodosDocumento22 páginasAct 1 MetodosLeo HarrisAún no hay calificaciones
- Dra. Rosario Ortega RuizDocumento1 páginaDra. Rosario Ortega RuizJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- C2SegundaLeyDeNewton2014 04 09Documento6 páginasC2SegundaLeyDeNewton2014 04 09Luis Carlos AndradeAún no hay calificaciones
- Dra. Rosario Ortega RuizDocumento1 páginaDra. Rosario Ortega RuizJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Ceros Prob EnunDocumento6 páginasCeros Prob EnunMarco Antonio Alanoca ChoqueAún no hay calificaciones
- Primer Reporte de LecturaDocumento5 páginasPrimer Reporte de LecturaJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- Documento Sin TítuloDocumento3 páginasDocumento Sin TítuloJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- C2SegundaLeyDeNewton2014 04 09Documento6 páginasC2SegundaLeyDeNewton2014 04 09Luis Carlos AndradeAún no hay calificaciones
- Secante Rodrigo PDFDocumento2 páginasSecante Rodrigo PDFNicolás Morales MaureiraAún no hay calificaciones
- EDs Lineales No Homogéneas Con Coeficientes ConstantesDocumento1 páginaEDs Lineales No Homogéneas Con Coeficientes ConstantesJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
- MPunto FijoDocumento4 páginasMPunto FijoJorge ̶S̶o̶r̶i̶a̶n̶o̶Aún no hay calificaciones
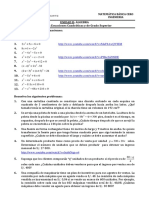
- Hoja de Trabajo Ecuaciones Cuadráticas y PolinómicasDocumento2 páginasHoja de Trabajo Ecuaciones Cuadráticas y PolinómicasManuel Rodrigo Chuquilín QuispeAún no hay calificaciones
- Fundamento de Mercados 2Documento7 páginasFundamento de Mercados 2Waldir JimenezAún no hay calificaciones
- Actividad 4 Empresa JL Suelas SasDocumento14 páginasActividad 4 Empresa JL Suelas SasMiguel Angel MARIN GUTIERREZAún no hay calificaciones
- Introduccion A La BibliaDocumento25 páginasIntroduccion A La BibliaVictor Tirado100% (1)
- Clasificacion de Las RocasDocumento13 páginasClasificacion de Las RocasAmilcar ChaparroAún no hay calificaciones
- 03673-2013-Aa Sentencia Caso CongaDocumento5 páginas03673-2013-Aa Sentencia Caso CongaAula VeintiunoAún no hay calificaciones
- Aportes A La Educacion de Sócrates Platón y PDFDocumento2 páginasAportes A La Educacion de Sócrates Platón y PDFRicardo Pineda Rios88% (8)
- Virtudes de MaríaDocumento4 páginasVirtudes de MaríaBryan EsparzaAún no hay calificaciones
- Jerarquización de Las NormasDocumento3 páginasJerarquización de Las NormasMarleny Marín Ocampo100% (1)
- Definicion e Importancia de Un Plan de Gestion AmbientalDocumento6 páginasDefinicion e Importancia de Un Plan de Gestion Ambientalnv2vrg2fqjAún no hay calificaciones
- TA 1 Competijuegos FINALDocumento14 páginasTA 1 Competijuegos FINALAlonso LopezAún no hay calificaciones
- CuadroDocumento2 páginasCuadroKelvisAún no hay calificaciones
- La Polaridad en Los Signos Del Zodíaco (III) : El Eje Géminis - SagitarioDocumento9 páginasLa Polaridad en Los Signos Del Zodíaco (III) : El Eje Géminis - SagitariofukukashiniAún no hay calificaciones
- REVISIÓN SANCIÓN OMISIÓN Inscripciones Articulo 688Documento24 páginasREVISIÓN SANCIÓN OMISIÓN Inscripciones Articulo 688Roberto Azula VerdugoAún no hay calificaciones
- Psicoanalisis Vincular, Familias Revista de La Asociacion Argentina de Psicologia y Psicoterapia de GrupoDocumento249 páginasPsicoanalisis Vincular, Familias Revista de La Asociacion Argentina de Psicologia y Psicoterapia de GrupoNatitesis RojoAún no hay calificaciones
- Almendrita CuentoDocumento10 páginasAlmendrita CuentoR LM LMAún no hay calificaciones
- El Modelo de Salud Colectiva ANGGI MONTERROSADocumento3 páginasEl Modelo de Salud Colectiva ANGGI MONTERROSAMarcela MonterrosaAún no hay calificaciones
- Inen 622Documento5 páginasInen 622Ana Mercedes Cadena SalazarAún no hay calificaciones
- EcologíaDocumento3 páginasEcologíaRafael VidesAún no hay calificaciones
- Tarea 1 de Educ. para La DiversidadDocumento7 páginasTarea 1 de Educ. para La DiversidadYaneli PaulinoAún no hay calificaciones
- Cultura Tiahuanaco Resumen para Cuarto GradoDocumento3 páginasCultura Tiahuanaco Resumen para Cuarto GradoFreddie Aguirre0% (2)