También podría gustarte
- Ruby on rails: Aprende a crear aplicaciones web desde ceroDe EverandRuby on rails: Aprende a crear aplicaciones web desde ceroAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Pieza#20Documento1 páginaPieza#20RAFAEL ARTURO SALAZAR MADRIGALAún no hay calificaciones
- 10 1fer2Documento1 página10 1fer2fernandoAún no hay calificaciones
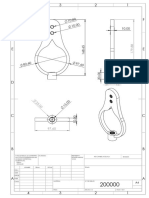
- 200000Documento1 página200000Anyelo Galarza silvaAún no hay calificaciones
- Placa RotoresDocumento1 páginaPlaca RotoresRoberto MagañaAún no hay calificaciones
- Ejercicio 17 UN3Documento1 páginaEjercicio 17 UN3Giovanni HernandezAún no hay calificaciones
- Pieza#12Documento1 páginaPieza#12Rafael SMAún no hay calificaciones
- Rod CapDocumento1 páginaRod CapJARET PINEDA PEREZAún no hay calificaciones
- Práctica12 LuisRomeroDocumento1 páginaPráctica12 LuisRomeroLuis Enrique Romero GarciaAún no hay calificaciones
- Plano 17 ParabrisasDocumento1 páginaPlano 17 ParabrisasLuis Enrique Benitez MunguiaAún no hay calificaciones
- Pieza#8 ConexionDocumento1 páginaPieza#8 ConexionRafael SMAún no hay calificaciones
- Semana 1 - Presentacion Tecno. Mat. 2019 Ii PDFDocumento64 páginasSemana 1 - Presentacion Tecno. Mat. 2019 Ii PDFPablo Arones GonzalesAún no hay calificaciones
- Formato Orden de Compra Usa AmbientalDocumento3 páginasFormato Orden de Compra Usa AmbientalLiz Gisela ZabalaAún no hay calificaciones
- Jaimes Cruz EverardoDocumento1 páginaJaimes Cruz EverardoEVERARDO JAIMES CRUZAún no hay calificaciones
- Planos 3.0Documento22 páginasPlanos 3.0DavidOlivaAún no hay calificaciones
- APU ME Linea 60kV LaViña - Motupe - PampaPañalaDocumento27 páginasAPU ME Linea 60kV LaViña - Motupe - PampaPañalaYupan Illan AhuryAún no hay calificaciones
- Cotizacion La VictoriaDocumento1 páginaCotizacion La VictoriaJesús René Canchala CárdenasAún no hay calificaciones
- BombereteDocumento1 páginaBombereteFabián Agustín Hernández EstradaAún no hay calificaciones
- Concepto 2.4Documento3 páginasConcepto 2.4jiade.dc.dcAún no hay calificaciones
- Copia de Tarea 5.1Documento10 páginasCopia de Tarea 5.1María Belén Sequeira MatamorosAún no hay calificaciones
- Pieza #1 Caja 3DDocumento1 páginaPieza #1 Caja 3DRAFAEL ARTURO SALAZAR MADRIGALAún no hay calificaciones
- Pieza 3 Daniel ReyesDocumento1 páginaPieza 3 Daniel ReyesBy darcAún no hay calificaciones
- Cuadro de Metrado Formal para ClasesDocumento10 páginasCuadro de Metrado Formal para ClasesJ HMAún no hay calificaciones
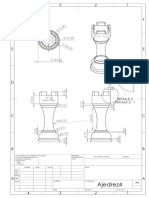
- Ajedrez 4Documento1 páginaAjedrez 4a.aguilar.melchor38Aún no hay calificaciones
- LegisComex. Sistema de Inteligencia Comercial - Estados FinancierosDocumento1 páginaLegisComex. Sistema de Inteligencia Comercial - Estados FinancierosjazminAún no hay calificaciones
- Rueda ParcialDocumento1 páginaRueda ParcialJulian BahamonAún no hay calificaciones
- Concepto 1.1Documento3 páginasConcepto 1.1jiade.dc.dcAún no hay calificaciones
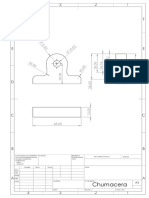
- Chuma CeraDocumento1 páginaChuma CeraPaulAún no hay calificaciones
- PISTÓNDocumento1 páginaPISTÓNLuis CeronAún no hay calificaciones
- Financiero A07 de JunioDocumento4 páginasFinanciero A07 de Juniodivision catastro urbanoAún no hay calificaciones
- Concepto 1.10Documento3 páginasConcepto 1.10jiade.dc.dcAún no hay calificaciones
- BN, M, ÑDocumento1 páginaBN, M, ÑBoneth BerriosAún no hay calificaciones
- Planilla de Conformidad - CertificadoDocumento1 páginaPlanilla de Conformidad - CertificadoJose Alex Bravo ZapataAún no hay calificaciones
- PRINTDocumento1 páginaPRINTElias moreno cAún no hay calificaciones
- Cuadro de MetradosDocumento11 páginasCuadro de Metradoszumi valverde arandaAún no hay calificaciones
- Acu Acometidas CajamarcaDocumento20 páginasAcu Acometidas CajamarcaJavier Ramirez VeraAún no hay calificaciones
- Plano 1 Semana 7Documento1 páginaPlano 1 Semana 7Camilo Andres Arango MartinezAún no hay calificaciones
- COTIZACION 2018090051 - 2018090052 (22405) EquiposDocumento8 páginasCOTIZACION 2018090051 - 2018090052 (22405) EquiposCAOZAún no hay calificaciones
- Pieza#5Documento1 páginaPieza#5RAFAEL ARTURO SALAZAR MADRIGALAún no hay calificaciones
- Anexo N°4 Itemizado Detallado de PartidasDocumento45 páginasAnexo N°4 Itemizado Detallado de PartidascesarAún no hay calificaciones
- Planilla de Conformidad - ParcialDocumento1 páginaPlanilla de Conformidad - ParcialJose Alex Bravo ZapataAún no hay calificaciones
- Cotizacion Municipalidad de BaguaDocumento2 páginasCotizacion Municipalidad de BaguaMi MundoAún no hay calificaciones
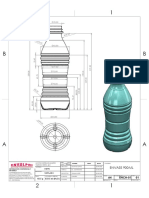
- Plano GeneralDocumento1 páginaPlano GeneralEnvalpri EnvasesAún no hay calificaciones
- Plano Uñas Montacarga PDFDocumento1 páginaPlano Uñas Montacarga PDFHelverAún no hay calificaciones
- Practica 1 Jean Paul Muñoz MuñozDocumento1 páginaPractica 1 Jean Paul Muñoz MuñozJEAN PAUL MUÑOZ MUÑOZAún no hay calificaciones
- Plano EjercicioDocumento1 páginaPlano EjercicioSebastian ChacónAún no hay calificaciones
- 496b-Factura-Proforma - VepicaDocumento2 páginas496b-Factura-Proforma - VepicaDave VegasAún no hay calificaciones
- Actividad 5Documento4 páginasActividad 5Albert Atrati CordeAún no hay calificaciones
- Nota de Entrega FALUCDocumento3 páginasNota de Entrega FALUCgcalderaAún no hay calificaciones
- Vista 4Documento1 páginaVista 4Benitez ValentinaAún no hay calificaciones
- Plano Maquina Trituradoratolva#2Documento1 páginaPlano Maquina Trituradoratolva#2erick josue velasquez litardoAún no hay calificaciones
- Arandela Biselada-Combinado 1Documento6 páginasArandela Biselada-Combinado 1Mario Nicolás EspinosaAún no hay calificaciones
- Modelo de Albarán en ExcelDocumento3 páginasModelo de Albarán en ExcelAmber CdmAún no hay calificaciones
- Ilovepdf MergedDocumento16 páginasIlovepdf Mergedandres delgadoAún no hay calificaciones
- Eslabon EfectorDocumento1 páginaEslabon Efectorreyes herreraAún no hay calificaciones
- VLT2MC047Documento1 páginaVLT2MC047JOSEAún no hay calificaciones
- Apu CerramientoDocumento2 páginasApu CerramientoDiego Fernando100% (1)
- Eje EstaticoDocumento1 páginaEje EstaticoAleajndro Ozaeta EidelmanAún no hay calificaciones
- Cotizacion Ferreteria EuropeaDocumento1 páginaCotizacion Ferreteria EuropeaEeServicios GeneralesAún no hay calificaciones
- Vibraciones en Una SeguetaDocumento4 páginasVibraciones en Una SeguetaAlonsoLopezAún no hay calificaciones
- Métodos de DefusificaciónDocumento4 páginasMétodos de DefusificaciónAlonsoLopezAún no hay calificaciones
- Alan Mathison TuringDocumento1 páginaAlan Mathison TuringAlonsoLopezAún no hay calificaciones
- Análisis Dimensional y ModeladoDocumento7 páginasAnálisis Dimensional y ModeladoAlonsoLopezAún no hay calificaciones
- Relación Funcional de Un PotenciómetroDocumento5 páginasRelación Funcional de Un PotenciómetroAlonsoLopezAún no hay calificaciones
- Que Son Los Equipos de RadiocomunicaciónDocumento4 páginasQue Son Los Equipos de RadiocomunicaciónDaniel Martinez50% (2)
- A - Intensificación en Automática y Electrónica V2Documento8 páginasA - Intensificación en Automática y Electrónica V2Juan MoleraAún no hay calificaciones
- Radwin 5000 PDFDocumento2 páginasRadwin 5000 PDFAnita FelixAún no hay calificaciones
- Apple Iphone 12 Pro Max, 256GB, Azul (Reacondicionado) Amazon - Com.mx ElectrónicosDocumento1 páginaApple Iphone 12 Pro Max, 256GB, Azul (Reacondicionado) Amazon - Com.mx Electrónicostonygrza2Aún no hay calificaciones
- Catalogo de OsciloscopiosDocumento32 páginasCatalogo de OsciloscopiosAlexis Cristian GonAún no hay calificaciones
- Laboratorio 2 Electronica 1Documento8 páginasLaboratorio 2 Electronica 1DIEGOVARGASHOLGUINAún no hay calificaciones
- Circuitos Lógicos y Su Importancia DigitalDocumento2 páginasCircuitos Lógicos y Su Importancia DigitalAnonymous TAvVwXAún no hay calificaciones
- Julio Del Blanco Carbajo - Actividad 6. Redes de OrdenadoresDocumento7 páginasJulio Del Blanco Carbajo - Actividad 6. Redes de OrdenadoresjulblanAún no hay calificaciones
- Diodo ZenerDocumento3 páginasDiodo ZenerABeel GarciaAún no hay calificaciones
- Marco Teorico AntenasDocumento6 páginasMarco Teorico AntenasManuelAún no hay calificaciones
- 13.2 Amplificadores Operacionales Sumador, Restador y en CascadaDocumento23 páginas13.2 Amplificadores Operacionales Sumador, Restador y en CascadaSara Mendieta100% (1)
- Actividad Semana 5 ElectronicaDocumento4 páginasActividad Semana 5 Electronicaalejandro michelAún no hay calificaciones
- Guia de Laboratorio EE442!1!2 y 3Documento20 páginasGuia de Laboratorio EE442!1!2 y 3Anghelo Tineo CordovaAún no hay calificaciones
- DecibelioDocumento10 páginasDecibelioOscar Flores RamirezAún no hay calificaciones
- Manual Instrucciones Dire UsietoDocumento140 páginasManual Instrucciones Dire Usietosalamaquinasf5Aún no hay calificaciones
- Cómo Configurar Un Roland TD-12 Con Addictive Drums - Ehow en Español PDFDocumento1 páginaCómo Configurar Un Roland TD-12 Con Addictive Drums - Ehow en Español PDFpanchoconceAún no hay calificaciones
- Condiciones Ambientales CPEDocumento15 páginasCondiciones Ambientales CPEFundación PINARDIAún no hay calificaciones
- Elementos y Herramientas Puesto trabajo-ACTIVIDAD EN GRUPODocumento12 páginasElementos y Herramientas Puesto trabajo-ACTIVIDAD EN GRUPOLuz Damaris MorenoAún no hay calificaciones
- Lmds y MmdsDocumento21 páginasLmds y MmdsMarco ArandaAún no hay calificaciones
- Sensores de Desplazamiento, Localización o Posición.Documento10 páginasSensores de Desplazamiento, Localización o Posición.Cony MarAún no hay calificaciones
- Ejercicio - en - Clase - CostoMOD - para ParcialDocumento3 páginasEjercicio - en - Clase - CostoMOD - para ParcialMoris RoarAún no hay calificaciones
- Termostatos Carel PDFDocumento44 páginasTermostatos Carel PDFJose Luis Hernandez MorenoAún no hay calificaciones
- Nodos SensoresDocumento8 páginasNodos SensoresDJ Rossa100% (1)
- Informe PLLDocumento10 páginasInforme PLLRubenCalleSanchezAún no hay calificaciones
- Ficha Técnica Inversor Cargador MultiPlus IIDocumento2 páginasFicha Técnica Inversor Cargador MultiPlus IIEduardo E. Cedeño OjedaAún no hay calificaciones
- Tecnología de La InformaciónDocumento3 páginasTecnología de La InformaciónNelson MataAún no hay calificaciones
- Resumen Capitulo 10 Libro HP-CiscoDocumento25 páginasResumen Capitulo 10 Libro HP-Cisconetfreaks4Aún no hay calificaciones
- Manual de Goldwave en EspañolDocumento3 páginasManual de Goldwave en EspañolFernando100% (1)
- Proyecto Individual - Parcial - v2Documento3 páginasProyecto Individual - Parcial - v2Jose perezAún no hay calificaciones
- Casa InteligenteDocumento51 páginasCasa InteligenteTutorias Cardona100% (2)