Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Capitulo 2 Espacios y Subespacios Vectoriales
Cargado por
Daniel UscangaTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Capitulo 2 Espacios y Subespacios Vectoriales
Cargado por
Daniel UscangaCopyright:
Formatos disponibles
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
CAPITULO Nº 2 LOS ESPACIOS Y SUBESPACIOS VECTORIALES (20 Horas)
2.1 ESPACIOS VECTORIALES
En este capítulo, el de más alto nivel, en lugar de ver a las columnas individuales, se ven
a los “espacios” de los vectores. No se entiende nada acerca de A x b , sin ver a los
espacios vectoriales y en especial a sus subespacios.
Se empieza con los más importantes espacios vectoriales. Ellos se indican por
medio de 1 , 2 , 3 , 4 , . Cada espacio n consiste de todos los vectores con
n componentes. Por decir, 5 tiene a todos los vectores columna que tienen cinco
componentes. Este es llamado el “espacio de 5dimensiones”.
Definición 2.1: El Espacio Vectorial
El espacio n consiste de todos los vectores columna v con n componentes.
Donde los componentes de v son números reales, que es la razón de la letra .
Un vector cuyos n componentes son números complejos, yacen en el espacio
vectorial C n .
El espacio monodimensional 1 se expresa por una línea (como el eje x ). Cada
vector v en 1 tiene un componente.
El espacio 2 se representa por medio del plano xy . Cada vector v en 2 tiene
dos componentes. La palabra “espacio”, hace pensar en todos aquellos vectores,
que pertenecen al plano. Cada vector proporciona las coordenadas x y y de un
punto en el plano.
Los vectores en 3 contiene a los puntos ( x, y, z ) del espacio tridimensional.
Cada vector v en 3 tiene tres componentes. Los vectores se escriben como una
columna entre corchetes o una fila usando comas y entre paréntesis, por decir,
4
0 Está en 3 , 1 i
1, 1, 0, 1, 1 está en 5 , está en C
2
1 i
1
Lo importante del algebra lineal es que trata de manera fácil a los espacios de
5dimensiones. No se dibujan a los vectores, solo se necesitan cinco números
(o n números).
Para multiplicar a v por 7 se multiplica a cada componente por el 7. El 7 es un
escalar. Para sumar vectores en 5 , se suman componente por componente.
Las dos operaciones vectoriales principales están adentro del espacio vectorial,
es decir, se pueden sumar cualquiera de los vectores en n , y también se
Notas del Ing. José M. Vera Valerio 1 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
puede multiplicar un vector por cualquier escalar, y sus resultados permanecen
dentro del espacio vectorial. Por decir, si v es un vector 4 1, 0, 0, 1 , entonces
2v es un vector de 4 con sus componentes 2, 0, 0, 2 , es decir, permanece en
el mismo espacio.
Se puede ver en el espacio n , un conjunto de condiciones (axiomas), tales como
1. La ley conmutativa de la suma: v w w v
2. La ley asociativa de la suma: u (v w) (u v) w
3. La existencia de un solo “vector cero” que satisface a 0 v v .
4. 1 por x es igual a x .
5. Por cada v existe un solo vector - v tal que v (-v) 0
6. La ley asociativa de la multiplicación: (c1 c 2 )v c1 (c 2 v )
7. La ley distributiva de la multiplicación: c v w c v c w
8. La Ley distributiva de la multiplicación: (c1 c2 )v c1 v c2 v
Definición 2.2: El Espacio Vectorial Real
Un espacio vectorial real es un conjunto de “vectores” que obedece las reglas de la
suma de vectores y multiplicación de vectores por números reales.
Las operaciones suma y multiplicación producen vectores que están en el mismo
espacio, y estas satisfacen a las ocho condiciones mencionadas.
Hay otros vectores aparte de los vectores columna, y otros espacios vectoriales
aparte de n , que también necesitan obedecer a esas razonables ocho reglas. Por
decir, aquí se muestran a tres espacios vectoriales aparte del espacio n :
1. M es el espacio vectorial de todas las matrices reales 2 2 . En M realmente
los vectores son matrices. En cada caso se pueden sumar: a matrices con
matrices. Se puede multiplicar a una matriz por 4, el resultado aun está en M .
2. F es el espacio vectorial de todas las funciones reales f (x) . En F todos los
vectores son funciones. En cada caso se pueden sumar las funciones con
funciones y se puede multiplicar a una función por 4, el resultado está en F .
3. Z es el espacio vectorial que solo consiste de un vector cero. En Z la única
suma es 0 0 0 . En cada caso se puede sumar el vector cero así mismo y se
puede multiplicar al vector cero por 4, el resultado aun está en Z .
Nota: Se ve que el espacio Z es de dimensión cero. Este es el espacio vectorial
más pequeño posible. Se vacila en llamarlo 0 , que significa sin componentes. El
espacio vectorial Z contiene solo a un vector (cero). Además,
Notas del Ing. José M. Vera Valerio 2 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Ningún espacio vectorial puede prescindir del vector cero.
Cada uno de esos espacios tiene a su propio vector cero (la matriz cero, función
cero y vector (0, 0, 0) de 3 ).
Ejemplo 2.1:
Demuestre que V es un espacio vectorial
x1
x
V n 2 : x j para j 1, 2, , n
x n
Donde cada vector en n es una matriz n 1 .
Solución:
De la definición de suma matricial, x y es una matriz de n 1 si x y y son matrices
de n 1 . Haciendo a las matrices
0 x1
0 x
0 y x 2
0 x n
Donde se observa que se cumplen las ocho condiciones del espacio vectorial.
Ejemplo 2.2:
Demuestre que V es un espacio vectorial.
V ( x, y, z) : ax by cz 0
V es el conjunto de todos los puntos en 3 que están en el plano con el vector
perpendicular (a, b, c) que pasa por el origen. Los vectores se dan en renglones.
Solución:
Suponga que ( x1 , y1 , z1 ) y ( x2 , y 2 , z 2 ) están en V . Entonces,
( x1 , y1 , z1 ) ( x2 , y 2 , z 2 ) ( x1 x2 , y1 y 2 , z1 z 2 ) V
Debido a que
Notas del Ing. José M. Vera Valerio 3 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
a( x1 x2 ) b ( y1 y 2 ) c ( z1 z 2 ) (a x1 b y1 c z1 ) (a x2 b y 2 c z 2 ) 0 0 0
Por tanto, se cumplen las dos reglas esenciales. Entonces, V es un espacio vectorial.
Tarea:
Suponga que ( x1 , x 2 ) ( y1 , y 2 ) se define a que sea ( x1 y 2 , x 2 y1 ) . ¿Con el producto
usual c x (cx1 , cx 2 ) , cuál de las ocho condiciones no se satisfacen?
Solución:
LOS SUBESPACIOS
A veces, se pide pensar en matrices y funciones como vectores, pero casi siempre,
los vectores que se necesitan son vectores columna ordinarios con n componentes,
quizás no a todos los vectores con n componentes. Existen importantes espacios
vectoriales adentro de n , esos son los subespacios de n . Se empieza con:
El espacio tridimensional, 3
Del espacio 3 , elija a un plano que pase por el origen (0, 0, 0) . Ese plano es un
espacio vectorial así mismo ya que si se suman dos vectores de ese plano, su suma
está adentro del plano, y si se multiplica un vector de ese plano por 2 o –5, este aún
está en ese plano. Ese plano no es 2 (se parece a 2 ) ya que los vectores tienen a
tres componentes y por lo tanto pertenecen a 3 . El plano es un espacio vectorial
adentro de 3 . Esto ilustra una de las ideas más fundamentales del algebra lineal. El
plano que pasa por (0, 0, 0) es un subespacio de todo el espacio vectorial 3 .
Definición 2.3:
Un subespacio de un espacio vectorial es un conjunto de vectores (incluyendo al 0 )
que satisface a las dos reglas, es decir, si v y w son vectores del subespacio y c es
cualquier escalar, entonces,
i. v w está en el subespacio.
ii. cv está en el subespacio.
Esto significa que, el conjunto de vectores es “cerrado” bajo las operaciones de
suma v w y multiplicación cv y cw , ya que las operaciones permanecen en ese
subespacio. Además, se pueden restar, ya que - w ( c 1 ) está en el subespacio y su
suma con v es v - w . En breve, todas las combinaciones lineales permanecen en el
subespacio.
Notas del Ing. José M. Vera Valerio 4 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Todas esas operaciones siguen las reglas del espacio principal, tal que las
ocho condiciones entran en automático. De este modo, solo es necesario revisar a un
subespacio por las condiciones y así efectuar las combinaciones lineales. Además,
a. Cada subespacio contiene al vector cero. El plano de 3 tiene que ir a través de
(0, 0, 0) , ya que al elegir a c 0 , por la regla (ii) se requiere que 0 v esté en el
subespacio. Entonces, los planos que no tengan al origen no son subespacios,
como cuando v está en el plano, y no lo están v y 0 v . Un plano que pierde al
origen no es un subespacio.
b. Las líneas a través del origen también son subespacios. Cuando se multiplica por
5, o se suman dos vectores sobre la línea, el resutado está sobre la línea. Pero la
línea debe de ir a través de (0, 0, 0) .
c. Otro subespacio es todo el espacio 3 , es decir, el espacio completo es también
un subespacio del mismo.
Entonces, se tiene una lista de todos los posibles subespacios de 3 :
( L ) Cualquier línea a través de (0, 0, 0) ( 3 ) El espacio completo
( P ) Cualquier plano a través de (0, 0, 0) ( Z ) El simple vector (0, 0, 0)
Una parte de un subespacio: ¿Es un subespacio?
Si trata de tener solo una parte del plano o línea, entonces los requerimientos para un
subespacio no se cumplen, es decir, observe los siguientes ejemplos en 2 .
Ejemplo 2.3:
Sea el conjunto de los vectores ( x, y) cuyos componentes son positivos o cero (este
es un cuadrante del plano). Diga si es un subespacio vectorial.
Solución:
Del conjunto, el vector (2, 3) se incluye pero no (2, 3) . Entonces se viola la regla (ii)
cuando se trata de multiplicarlo por c 1 . Así el cuadrante no es un subespacio.
Ejemplo 2.4:
Del Ejemplo 2.3, si también se incluyen a todos los vectores cuyas dos componentes
son negativas (dos cuadrantes del plano). Diga si es un subespacio vectorial.
Solución:
La regla (ii) se cumple: se puede multiplicar por cualquier c . Pero ahora la regla (i)
falla. La suma de v (2, 3) mas w (3, 2) es (1, 1) , vector que está afuera de los
dos cuadrantes. Por lo tanto, los dos cuadrantes no forman a un subespacio.
Notas del Ing. José M. Vera Valerio 5 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Regla de los subespacios
Las reglas (i) y (ii) involucran a la suma v w y la multiplicación por escalares tales
como c y d . Las reglas se combinan en una sola regla, la regla de los subespacios:
Un subespacio que tiene a v y w debe contener todas las combinaciones lineales
cv dw .
Ejemplo 2.5:
Dentro del espacio vectorial M de todas las matrices 2 2 , aquí se muestran a dos
subespacios. Diga si son subespacios vectoriales:
a b a 0
( U ) Todas las matrices triangulares ; ( D ) Todas las matrices diagonales 0 d
0 d
Solución:
Sume dos matrices de U , y la suma aún está en U . Sume dos matrices diagonales,
y la suma es diagonal. ¡En este caso D es también un subespacio de U ( b 0 )! Claro
la matriz cero está en estos subespacios, cuando a , b y d sean igual a cero.
Para encontrar un subespacio más pequeño de matrices diagonales, se podría
requerir que a d . Entonces las matrices son múltiplos de la matriz identidad I . La
suma de 2 I 3I está en este subespacio, y también está 3 por 4 I . Las matrices cI
forman una línea de matrices adentro de M y U y D .
¿Es la matriz I un subespacio así mismo? Seguro que no. Solo la matriz cero
lo es. Su mente podría inventar más subespacios de matrices 2 2 .
Tarea:
Dentro del espacio vectorial de todas las matrices 3 3 , sea el conjunto de matrices
simétricas. Diga si este conjunto es un subespacio vectorial.
Solución:
EL “ESPACIO COLUMNA DE A” QUE RESULTA DE RESOLVER LA ECUACIÓN Ax=b
Los subespacios más importantes se ligan con la matriz A , cuando se resuelve por
A x b . Por decir, si A no es invertible (matriz no cuadrada), el sistema se resuelve
para algún b y no se resuelve para otro b . El objetivo es describir a los buenos lados
derechos b , es decir, a los vectores que se pueden escribir como Ax . Esos vectores
forman el espacio columna de A .
Notas del Ing. José M. Vera Valerio 6 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
El espacio columna de A
Recuerde que A x es una combinación de las columnas de A . Para obtener a cada
posible b , se utiliza a todo posible x . Entonces, empiece con las columnas de A , y
calcule todas sus combinaciones lineales. Esto produce al espacio columna de A .
Este es un espacio vectorial hecho de los vectores columna (no solo las n columnas
de A , sino de todas las combinaciones A x ).
Definición 2.4:
El espacio columna consiste de todas las combinaciones lineales de las columnas
de la matriz A . Las combinaciones son todos los posibles vectores A x que llenan
el espacio columna C (A) .
Para resolver a A x b se expresa al vector b como una combinación de las
columnas de A . El lado derecho b debe estar en el espacio columna que produce
la matriz A del lado izquierdo, o ¡no hay solución!
Teorema 2A:
El sistema A x b solo se resuelve, si y solo si el vector b yace dentro del espacio
columna de A .
Cuando b está en el espacio columna de A , este vector es una combinación
de las columnas de la matriz A . Los coeficientes de esa combinación producen una
solución x del sistema A x b .
El subespacio columna
Suponga que A es una matriz m n . Sus columnas tienen m componentes (no n ).
De tal forma que las columnas pertenecen a m . El espacio columna de A es un
subespacio de m (no de n ). El conjunto de todas las combinaciones columna A x
satisface a las reglas (i) y (ii) de un subespacio: Cuando se suman las combinaciones
lineales o multiplican por escalares, aún se generan combinaciones de las columnas.
La palabra “subespacio” se justifica al tomar todas las combinaciones lineales. Por
decir, suponga a una matriz A 3 2 , cuyo espacio columna es un subespacio de 3
(un plano). Observe en el siguiente ejemplo como se determina su espacio columna.
Ejemplo 2.6:
Determine el espacio columna del producto
1 0 1 0
x1
A x 4 3 A x x1 4 x2 3
3 2
x
2 2 3
Notas del Ing. José M. Vera Valerio 7 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Solución:
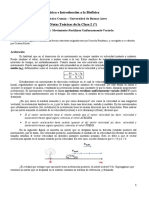
El espacio columna consiste de todas las combinaciones de las dos columnas (el
producto de cualquier x1 por la primer columna mas el producto de cualquier x2
por la segunda columna), esas combinaciones llenan un plano en 3 (Figura 2.1).
Figura 2.1: El espacio columna es un plano que contiene a dos columnas
Si el lado derecho b yace en ese plano (ver la Figura 2.1), entonces b es una de
las combinaciones, y ( x1 , x2 ) es una solución de A x b . Además, como el plano
tiene cero de espesor, lo más probable es que la mayoría de los b no esté en el
espacio columna (no existe una combinación lineal), entonces por la mayoría de los
b no hay una solución a nuestras tres ecuaciones con dos incógnitas.
Los lados derechos b alcanzables, son los vectores del espacio columna:
a) Una combinación es la propia primer columna (tome a x1 1 y x 2 0 ).
b) Otra combinación es la segunda columna (tome a x1 0 y x 2 1 ).
c) Como el vector (0, 0, 0) yace en el espacio columna. el plano pasa a través del
origen y hay de seguro una solución a A x 0 . Esa solución, siempre disponible,
es x 0 . El nuevo nivel de entendimiento es ver a todas las combinaciones (el
subespacio completo es generado por esas dos columnas).
Nota: El espacio columna de A se indica como C (A) . Empiece con las columnas de
A y tome a todas sus combinaciones lineales. Se podría obtener a m completo o a
un solo subespacio.
Ejemplo 2.7:
Describa a los espacios columna (ellos son subespacios de 2 ) de las matrices:
1 0 1 2 1 2 3
I , A , B
0 1 2 4 0 0 4
Solución:
El espacio columna de I ( Ax , para cualquier c ) es todo el espacio 2 , C (I ) es
2 . Cada vector es una combinación de las columnas de I .
Notas del Ing. José M. Vera Valerio 8 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
El espacio columna de A es solo una línea, debido a que la segunda columna
(2, 4) es un múltiplo de la primera columna (1, 2) . Esos vectores son diferentes,
pero nuestro ojo está sobre los espacios vectoriales. El espacio columna contiene
a (1, 2) y (2, 4) y a todos los vectores (c, 2c) a lo largo de esa línea. La ecuación
A x b solo tiene solución cuando b está en esa línea.
La tercera matriz (con tres columnas) no coloca a ninguna restricción sobre b . El
espacio columna C (B) es todo el 2 . Cada lado derecho b es alcanzable. El
vector b (5, 4) es la columna 2 mas la columna 3, tal que x puede ser (0, 1, 1) . El
mismo vector (5, 4) es también 2 (columna 1) columna 3 , tal que otra posible x es
(2, 0, 1) . Esta matriz tiene el mismo espacio columna que I (se permite a cualquier
b ). Pero ahora x tiene algunas componentes extras y existen más soluciones.
Tarea:
Si A es cualquier matriz invertible 5 5 , entonces su espacio columna es… ¿Porque?
Solución:
2.2 EL “ESPACIO NULO DE A” QUE RESULTA DE RESOLVER LA ECUACIÓN Ax=0
Esta sección estudia el espacio de todas las soluciones de A x 0 . La matriz A m n
puede ser cuadrada o rectangular y se tiene que:
Para las matrices invertibles, la única solución es x 0 .
Para las matrices no invertibles, hay soluciones no cero para A x 0 . En la que
cada solución x pertenece al espacio nulo de A .
Por decir, considere el siguiente sistema:
x1 3x 2 2 x 3 0 1 3 2
A x 0. Donde A
5 x1 9 x 2 x 3 0 5 9 1
Definición 2.4:
El espacio nulo de A consiste de todas las soluciones para la ecuación A x 0 . Estos
vectores solución x están en n . El espacio nulo que contiene a todas las soluciones
se indica mediante (A) .
Revise que los vectores solución formen a un subespacio, es decir, suponga que las
soluciones x de A x 0 , y y de A y 0 , están en el espacio nulo. Entonces:
Notas del Ing. José M. Vera Valerio 9 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
a) Mediante las reglas del producto matricial se tiene que A ( x y) Ax Ay 0 0 , y
también que a A (cx) cAx c0 . Los lados derechos aún son cero.
b) Por tanto, x y y c x están en el espacio nulo (A) . Ya que los vectores solución
se pueden sumar y multiplicar sin dejar al espacio nulo, este es un subespacio.
Nota 1: Los vectores solución x tienen n componentes y son vectores de n , de tal
modo que el espacio nulo es un subespacio de n . El espacio columna C (A) es un
subespacio de m .
Nota 2: Si el lado derecho b no es cero, las soluciones de A x b no forman a un
subespacio. El vector x 0 es una solución si b 0 . Si el conjunto de soluciones no
incluye a x 0 , este no puede ser un subespacio.
Ejemplo 2.8:
Las ecuaciones x 2 y 3z 0 y x 2 y 3z 6 provienen de la matriz A13 1 2 3 .
Diga si estos planos son subespacios de 3 .
Solución:
Las soluciones de la primera ecuación generan un plano a través del origen. El plano
es un subespacio de 3 y es el espacio nulo de A . Las soluciones de la segunda
ecuación, también forman un plano, pero no un subespacio.
Ejemplo 2.9.1:
Sea A de un ejemplo anterior y sea x un vector. Determine si x pertenece a (A) .
1 3 2
A y x 5 2
T
1
3
5 9
Solución:
Para probar que si x satisface A x 0 , simplemente calcule
5
1 3 2 5 9 4 0
Ax 3
5 9 1 25 27 2 0
2
Entonces x está en (A) .
Ejemplo 2.9.2: Descripción del espacio nulo en 2
Describa al espacio nulo de
Notas del Ing. José M. Vera Valerio 10 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
1 2
A
3 6
Solución:
Al aplicar la eliminación a las ecuaciones lineales A x 0 , se tiene
1 2 x1 0 x1 2 x 2 0 x1 2 x 2 0
3
6 x 2 0 3x 6 x 0
1 2
00
De la eliminación se ve que realmente solo hay una ecuación, ya que la segunda
ecuación es la primera ecuación por 3. En el trazo fila, la línea x1 2 x2 0 es igual
a la línea 3x1 6 x 2 0 . Por tanto, esa línea es el espacio nulo (A) .
Para describir esta línea de soluciones, aquí se tiene un procedimiento eficiente:
a) Elija un punto sobre la línea, es decir, una “solución especial”. Entonces todos
los puntos sobre la línea son múltiplos de esta.
b) Ese punto se determina mediante la selección de que la segunda componente
sea x 2 1 , una elección especial.
c) De la ecuación x1 2 x 2 0 x1 2(1) 2 , la primera componente debe ser
x1 2 . Así la solución especial resulta ser (2, 1) , es decir,
2
El espacio nulo (A) contiene a todos los múltiplos de la solución s
1
Entonces, la mejor forma de describir al espacio nulo, es mediante el cálculo de las
soluciones especiales de A x 0 . Este ejemplo tiene una solución especial y su
espacio nulo es una línea.
El espacio nulo consiste de todas las combinaciones de las soluciones especiales.
Ejemplo 2.10: Descripción de un espacio nulo en 3
Describa el espacio nulo del plano x 2 y 3z 0 (Ejemplo 2.8).
Solución:
Este plano tiene dos soluciones especiales, es decir,
x 0 y 1, z 0
2 3
1 2 3 y 0 x 2 y 3 z 0
y 0 , z 1
s1 1 , s 2 0
z 0 0 1
Notas del Ing. José M. Vera Valerio 11 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Esos vectores s1 y s 2 yacen sobre el plano x 2 y 3z 0 , que es el espacio nulo de
A 1 2 3. Todos los vectores sobre ese plano son combinaciones de s1 y s 2 .
Nota: Observe que es lo especial acerca de las soluciones s1 y s 2 :
a) Ellos tienen unos y ceros en los últimos dos componentes. Esos componentes
son “libres” y se seleccionan de forma especial.
b) Entonces los primeros componentes 2 y 3 se determinan mediante la ecuación
A x 0.
c) La primer columna de A 1 2 3 contiene al pivote, de tal forma que el primer
componente de la solución x no es libre.
d) Los componentes libres corresponden a las columnas sin pivotes.
La descripción de las soluciones especiales se completará después de otro ejemplo.
Recuerde, la elección especial de uno o cero es solo para las variables libres.
Ejemplo 2.11:
Describa el espacio nulo de estas tres matrices.
1 2
3 8
1 2 A 1 2 2 4
A B , C A 2 A
8 16
,
3 2 A 2 4 3 8 6
6 16
Solución:
La ecuación A x 0 solo tiene a la solución x 0 . El espacio nulo es Z y este solo
contiene al punto x 0 en 2 . Es decir, esto proviene de la eliminación:
1 2 x1 0 1 2 x1 0 x 0
3 1
8 x 2 0 0 2 x 2 0 x 2 0
A es invertible, no hay soluciones especiales. Todas las columnas tienen pivotes.
La matriz B tiene el mismo espacio nulo Z . Las primeras dos ecuaciones en
B x 0 requieren de nuevo a x 0 . Las dos últimas ecuaciones también deberán
ser forzadas a que x 0 . Cuando se agregan ecuaciones extras, es seguro que el
espacio nulo no se puede volver mayor. Las filas extras imponen mas condiciones
sobre los vectores x del espacio nulo.
La matriz rectangular C es diferente debido a que tiene columnas adicionales en
lugar de filas adicionales. El vector solución x tiene cuatro componentes, donde
la eliminación produce los pivotes de las dos primeras columnas de C , pero las
dos últimas columnas son “libres”, no tienen pivotes, es decir.
Notas del Ing. José M. Vera Valerio 12 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
1 2 2 4 1 2 2 4
C U
3 8 6 16 0 2 0 4
columnas pivotes columnas libres
Para las variables libres x3 y x4 , se hacen elecciones especiales de unos y ceros.
Haciendo a x3 1 , x 4 0 y después a x3 0, x 4 1 . Las variables pivote x1 y x2 se
obtienen de la ecuación U x 0 . Por tanto, resultan dos soluciones especiales del
espacio nulo de C (y también el espacio nulo de U ), que son:
2 0 pivote
0 2 variables
x 2 x 2 2 x3 4 x 4 0 x3 1, x4 0
U x0 1 s1 , s2
0 x1 2 x 2 0 x3 4 x 4 0 x3 0, x4 1 1 0 libre
0 1 variables
Un comentario más por anticipar lo que viene, es que la eliminación no termina en la
matriz triangular superior U ! Se puede continuar con esto para hacer a esta matriz
más simple de dos formas:
1. Producir ceros arriba de los pivotes, al eliminar hacia arriba.
2. Producir unos en los pivotes, al dividir a toda la fila entre su pivote.
Esos pasos no cambian al vector cero sobre el lado derecho de la ecuación. El
espacio nulo permanece igual. El espacio nulo es más fácil de ver cuando se
alcanza la forma escalón fila reducida R . Este tiene a I en los pivotes columna:
1 2 2 4 1 0 2 0 1 0 2 0 1 0 2 0
U R
0 2 0 4 0 2 0 4 0 1 0 2 0 1 0 2
columnas pivote I
Primero, se restó la fila 2 de la fila 1 en U , y después se multiplicó a la fila 2 por 1
2
.
Las dos ecuaciones originales se simplificaron, x1 2 x3 0 y x2 2 x4 0 .
La primera solución especial es aún s1 (2, 0, 1, 0) , y la segunda, s 2 es la
misma. Las dos soluciones especiales son más fáciles de determinar a partir del
sistema reducido R x 0 .
Comentarios:
1. Para muchas matrices, la única solución de A x 0 es x 0 . Sus espacios nulos
(A) Z solo tienen a ese único vector. La única combinación de las columnas
que produce a b 0 es entonces la “combinación cero” o “combinación trivial”.
Notas del Ing. José M. Vera Valerio 13 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
2. Para el espacio nulo Z , se dice que las columnas de A son independientes. No
hay ninguna combinación de las columnas que resulte el vector cero, excepto la
combinación cero. Todas las columnas tienen pivotes y ninguna columna libre.
RESOLVIENDO LA ECUACIÓN Ax=0 MEDIANTE LA ELIMINACION
La matriz A m n es rectangular y aún se utiliza la eliminacion. Se resuelven m
ecuaciones con n incógnitas cuando b 0 . Después de simplificar A por medio de
las operaciones fila, se lee la solución (o soluciones). Recuerde las dos etapas para
resolver a la ecuación A x 0 :
1. La eliminacion directa desde A hasta una triangular U (o su forma reducida R ).
2. La sustitucion inversa desde U x 0 o R x 0 para encontrar a x .
Se verá una diferencia en la sustitucion inversa, cuando A y U tengan menos
pivotes que n . Ahora se permiten a todas las matrices, no solo las agradables (que
son las matrices cuadradas con inversas).
Los pivotes aún no son cero. Las columnas debajo de los pivotes son aún cero.
Pero puede pasar que una columna no tenga pivote. En ese caso, no pare el cálculo.
Vaya hacia la siguiente columna. Por decir, una matriz 3 4 con dos pivotes:
1 1 2 3
A 2 2 8 10
3 3 10 13
La eliminación directa
Seguro que a11 1 es el primer pivote. Haga ceros al 2 y 3 abajo de ese pivote:
1 1 2 3
fila 2 2 ( fila 1)
A 0 0 4 4
fila 3 3 ( fila 1)
0 0 4 4
La segunda columna tiene un cero en la posición del pivote. Se busca abajo del
cero por una entrada no cero, listo para hacer algún intercambio de filas. Pero la
entrada abajo de esa posición es también cero. La eliminacion no puede hacer
nada con la segunda columna. No hay una razón para parar, y así ir de este modo a
la tercera columna.
En la tercera columna está el segundo pivote que es 4 . Restando la fila 2 de la fila
3 se pone en cero a la columna abajo del pivote. Resultando,
Notas del Ing. José M. Vera Valerio 14 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
1 1 2 3 x1 x 2 2 x3 3x 4 0
La matriz triangular U : U 0 0 4 4 4 x3 4 x 4 0
0 0 0 0 00
La cuarta columna tiene un cero en la posición del pivote (pero no se puede hacer
nada). No hay una fila por intercambiar, y la eliminación directa está completa. La
matriz tiene tres filas, cuatro columnas, y dos pivotes. La A x 0 original parece
involucrar a tres ecuaciones diferentes, pero la tercera ecuación es la suma de las
dos primeras. Esta se satisface de forma automática ( 0 0 ) cuando se satisfacen
las dos primeras ecuaciones.
Sustitución inversa
De la sustitución inversa, se encuentran todas las soluciones de U x 0 . Con cuatro
incógnitas y dos pivotes, hay muchas soluciones. La pregunta es como escribirlas.
Un buen método es separar las variables pivotes de las variables libres. Entonces,
P Las variables pivote son x1 y x3 , ya que las columnas 1 y 3 tienen pivotes.
F Las variables libre son x2 y x4 , ya que las columnas 2 y 4 no tienen pivotes.
Las variables libres x2 y x4 pueden tomar cualquier valor. Las elecciones más
simples para las variables libres son unos y ceros. Esas elecciones generan las
soluciones especiales.
Entonces, la sustitución inversa determina a las variables pivote x1 y x3 .
Para obtener las soluciones especiales para x1 x 2 2 x3 3x 4 0 y 4 x3 4 x 4 0 ,
a) Se elije a x 2 1 y x 4 0 . Por sustitución inversa x 3 0 , entonces x1 1 .
b) Se elije a x 2 0 y x 4 1 . Por sustitución inversa x3 1 , entonces x1 1 .
Estas soluciones especiales resuelven a U x 0 y por tanto a A x 0 . Ellas están en
el espacio nulo. Donde cada solución es una combinación de esas soluciones.
1 1 x 2 x 4
1 0 x
x x2 x 2
Solución completa: 0 4 1 x 4
0 1 x 4
especial especial completa
El vector s1 (1, 1, 0, 0) es la primera solución especial cuando x 2 1 y x 4 0 . La
segunda solución especial s 2 tiene a x 2 0 y x 4 1 . Todas las soluciones son las
Notas del Ing. José M. Vera Valerio 15 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
combinaciones lineales de s1 y s 2 . Las soluciones especiales están en el espacio
nulo (A) y sus combinaciones llenan a todo el espacio.
Existe una solución especial por cada variable libre. Si no hay variables libres
(significa que existen n pivotes) entonces la única solución de U x 0 y A x 0 es
la solución trivial x 0 . Todas las variables son variables pivotes. En ese caso los
espacios nulos de A y U solo tienen al vector cero. Sin variables libres, y en
cada columna sus pivotes, la salida de la base nula es una matriz vacía.
Ejemplo 2.12:
Describa el espacio nulo de
1 5 7
U
0 0 9
Solución:
La segunda columna de U no tiene pivote, por lo que x2 es una variable libre y la
solución especial tiene a x 2 1 . La sustitución inversa para 9 x3 0 , implica que
x 3 0 . De este modo, la ecuación x1 5x 2 0 implica que x1 5 .
Las soluciones de U x 0 son múltiplos de la solución especial, es decir,
5
1 5 7 x1 5 x 2 7 x3 0 x2 1
U x x 2 1
0 0 9 9 x3 0 0
El espacio nulo de U es una línea de 3 . Este tiene a los múltiplos de la solución
especial. Una variable es libre, y nullbasis (U ) tiene una columna.
Se continúa con la eliminación de U , para obtener los ceros arriba de los pivotes y
los unos en los pivotes. El 7 se elimina y el pivote se cambia de 9 a 1. El resultado
final de esta eliminación será la matriz escalón reducida R , es decir,
5
1 5 7 1 5 0 1 5 0 x1 5 x 2 0 x3 0 x2 1
U R s 1
0 0 9 0 0 9 0 0 1 x3 0 0
Esto aclara que la solución especial (columna de ) es s (5, 1, 0) .
Tarea:
Pruebe que U y A LU tienen el mismo espacio nulo cuando L es invertible:
Si U x 0 entonces LU x 0 . Si LU x 0 , como se puede saber si U x 0
Notas del Ing. José M. Vera Valerio 16 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Solución:
LAS MATRICES ESCALÓN
El proceso de la eliminación directa que lleva de A hacia U , inicia con una matriz A
m n y actúa mediante las operaciones fila, que incluye intercambios de fila. Este se
dirije hacia la siguiente columna cuando en la columna actual no se dispone de ningún
pivote. En el “caso escalera” m n , U es una matriz escalón.
Por decir, sea una matriz escalón 4 7 con tres pivotes resaltados en negritas:
x x x x x x x
0 x x x x x x
U
0 0 0 0 0 x x
0 0 0 0 0 0 0
Esta tiene a tres variables pivotes x1 , x 2 , x6 , cuatro variables libres x3 , x4 , x5 , x7 y
cuatro soluciones especiales del espacio nulo, (U ) .
Pregunta: ¿Cual es el espacio columna y el espacio nulo de esta matriz?
Respuesta:
Las columnas tienen cuatro componentes tal que ellas yacen en 4 (no en 3 !).
La cuarta componente de cada columna es cero y por tanto la combinación de las
columnas (cada vector del espacio columna) tiene cero en la cuarta componente.
El espacio columna C (U ) consiste de todos los vectores de la forma (b1 , b2 , b3 , 0) .
Mediante esos vectores y utilizando la sustitución inversa se resuelve a U x b .
Esos vectores b son todas las posibles combinaciones de las siete columnas.
El espacio nulo (U ) es un subespacio de 7 . Las soluciones para U x 0 son
todas las combinaciones de las cuatro soluciones especiales, una por cada
variable libre, es decir,
1. Si las columnas 3, 4, 5, 7 no tienen pivotes, entonces las variables libres son
x3 , x 4 , x5 , x7 .
2. Establezca a una variable libre en 1 y a las otras variables libres en cero.
3. Resuelva a U x 0 por las variables pivotes x1 , x 2 , x6 .
4. Esto produce a una de las cuatro soluciones especiales del espacio nulo .
Notas del Ing. José M. Vera Valerio 17 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Las filas no cero de una matriz escalón van hacia abajo en forma de escalera.
Los pivotes son las primeras entradas no cero de esas filas. Existe una columna de
ceros debajo de cada pivote. El contar a los pivotes nos conduce hacia un teorema.
Teorema 2B:
Si A x 0 contiene más incógnitas que ecuaciones ( n m , más columnas que filas),
entonces tiene soluciones no cero. Deberán existir columnas libres, o sea sin pivotes.
En otras palabras, una matriz corta ancha ( n m ) siempre tiene vectores no cero en
su espacio nulo. Deberá existir al menos n m variables libres, ya que el número de
pivotes no puede exceder a m (la matriz solo tiene m filas, y una fila nunca tiene dos
pivotes). Una fila podría no tener pivote, lo cual significa que hay una variable libre,
que se establece en 1 . Por tanto, la ecuación A x 0 tiene una solución no cero.
El espacio nulo es un subespacio. Su dimensión es el número de variables
libres. Esta idea (la dimensión de un subespacio) se define y explica en este capítulo.
LA MATRIZ ESCALÓN FILA REDUCIDA R
Se puede ver algo más de la matriz escalón U , al continuar con el ejemplo :
1 1 2 3
U
0 0 4 4
0
0 0
0
Se puede dividir la segunda fila entre 4 . Entonces, ambos pivotes se igualan a 1 . Se
puede restar 2 veces a esta nueva fila 0 0 1 1 de la fila de arriba. La matriz
escalón fila reducida R tiene ceros arriba de los pivotes así como también abajo:
1 1 0 1
R 0 0 1 1
0 0 0 0
La matriz R tiene a 1' s como pivotes. Los ceros arriba de los pivotes provienen de
la eliminación inversa.
Si A es invertible, su forma escalón fila reducida es la matriz identidad R I . Esta
es lo último en la reducción fila. Claro, el espacio nulo es entonces Z .
Nota 1: Los pivotes ceros de R facilitan el cálculo de las soluciones especiales:
1. Establezca a x 2 1 y a x 4 0 y resuelva por R x 0 . Entonces x1 1 y x 3 0 . Se
ve que esos números, 1 y 0 se ubican en la columna 2 de R (con signos mas).
2. Establezca a x 2 0 y x 4 1 y resuelva por R x 0 . Entonces x1 1 y x3 1 .
3. Se ve que esos números, 1 y 1 están en la columna 4 de R (con signos mas).
Notas del Ing. José M. Vera Valerio 18 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Nota 2: Al Invertir los signos se pueden leer las soluciones especiales directamente
desde R . El espacio nulo ( A) (U ) ( R) contiene todas las combinaciones de las
soluciones especiales, es decir,
1 1
1 0
x x2 x 4 (Solución completa de A x 0 )
0 1
0 1
Tarea:
Si el espacio nulo de A comprende a todos los múltiplos del vector x (2, 1, 0, 1) , a)
cuantos pivotes aparecen en U y b) Cual es R .
Solución:
2.3 EL RANGO Y LA FORMA DE FILA REDUCIDA
Esta sección completa el paso desde A a a su forma escalón fila reducida R . La matriz
es m n (completamente general). La matriz R también es m n , pero cada columna
pivote tiene solo una entrada no cero (el pivote siempre es 1 ). Por decir, R es 3 5 ,
1 3 0 2 1
R 0 0 1 4 3
0 0 0 0 0
Se ve el cero arriba y abajo del segundo pivote, R es el resultado final del proceso.
EL RANGO DE UNA MATRIZ
Los números m y n dan el tamaño de una matriz, pero no necesariamente el tamaño
verdadero de un sistema lineal. Una ecuación como 0 0 no contaría. Si hay dos filas
iguales en A , entonces la segunda fila desaparece de R . También, si la fila 3 es una
combinación de las filas 1 y 2, entonces la fila 3 se volvería ceros en R . No se quiere
contar a las filas ceros. El verdadero tamaño de A está dado por su rango, es decir,
Notas del Ing. José M. Vera Valerio 19 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Definición 2.5:
El rango de A es el número de pivotes. Este número es r .
Por decir, la matriz ejemplo R tiene de rango a r 2 . Esta tiene a dos pivotes y dos
columnas pivotes. También los tiene la matriz desconocida A que produjo a R .
1 3 0 2 1
R 0 0 1 4 3
0 0 0 0 0
Matriz de rango completo
Se sabe que r m y r n , debido a que el número de pivotes no puede ser mayor
que el número de filas, ni mayor que el número de columnas. Los casos r m y r n
de “rango fila completo” y “rango columna completo” serán especiales e importantes.
Se mencionan aquí y se regresa pronto con ellos:
a) A tiene rango fila completo si cada fila tiene un pivote: r m . Ninguna fila cero en
la matriz R .
b) A tiene rango columna completo si cada columna tiene un pivote: r n . Ninguna
variable libre.
Por decir, para una matriz cuadrada invertible que tiene un rango r m n , la matriz
R es igual a I .
Matriz de rango uno
En el otro extremo están las matrices de rango uno, donde solo existe un pivote, ya
que la eliminación hace ceros la primera columna y hace ceros a las otras columnas.
Esto quiere decir que cada fila de A es un múltiplo de la fila pivote. Al mismo tiempo,
cada columna de A es un múltiplo de la columna pivote! Por decir,
1 3 10 1 3 10
Matriz de rango uno: A 2 6 20 R 0 0 0
3 9 30 0 0 0
El espacio columna de una matriz de rango uno es “monodimensional”. Aquí todas
las columnas restantes están sobre la línea u (1, 2, 3) . Las columnas de A son u , 3u
y 10 u . Ponga a esos coeficientes en la fila v T 1 3 10 y resulta la forma especial
de rango uno A u v T , es decir,
Notas del Ing. José M. Vera Valerio 20 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
1 3 10 1
A = producto de columna por fila= u v T 2 6 20 2 1 3 10 (2.5)
3 9 30 3
Ejemplo 2.13:
Cuando todas las filas son múltiplos de una fila pivote, el rango es r 1 , es decir,
1 3 4 1 3 4 0 3 0 1 5 1
2 6 8 0 0 0 y 0 5 0 0 y 2 0 y 6 1 todas tienen rango 1
(*) Otras definiciones de rango
a) La segunda definición de rango (de un mayor nivel en el Algebra Lineal) trata con
todas las filas y columnas (vectores y no solo números). Las matrices A , U y R
tienen a r filas independientes (las filas pivote) y a r columnas independientes
(las columnas pivote).
b) La tercera definición de rango (la de más alto nivel) trata con espacios vectoriales.
El rango r es la “dimensión” del espacio columna y también del espacio fila. Lo
más importante es que r también revela la dimensión del espacio nulo.
LAS COLUMNAS PIVOTES
Las columnas pivotes de R tienen 1' s en los pivotes y 0' s en las otras partes. Las r
columnas pivotes tomadas juntas contienen una matriz identidad I r r . Esta se
sitúa arriba de las m r filas de ceros.
Las columnas pivote de A probablemente no son obvias desde la matriz A .
Las r columnas de A que tienen pivotes (en U y R ) son las columnas pivotes. La
matriz ejemplo R es de la forma escalón fila reducida de esta matriz A , es decir,
1 3 0 2 1 1 3 0 2 1
Columnas pivotes A 0 0 1 4 3 produce a R 0 0 1 4 3
1 3 1 6 4 0 0 0 0 0
Los espacios columna de R y A pueden ser diferentes! Todas las columnas
de R terminan en cero. Aquí está una definición matemática directa de las columnas
pivotes de A :
Teorema 2C:
Las columnas pivote no son combinaciones de columnas anteriores. Las columnas
libres son combinaciones de columnas anteriores. Entonces, esas combinaciones
son las ¡soluciones especiales!
Notas del Ing. José M. Vera Valerio 21 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Una columna pivote de R (con 1 en la fila pivote) no puede ser combinación de
las anteriores columnas (con 0 ' s en esa fila). La misma columna de A no puede ser
una combinación de anteriores columnas, debido a que A x 0 exactamente cuando
R x 0 . Ahora se busca a la solución especial x desde cada columna libre.
LAS SOLUCIONES ESPECIALES
Cada solución especial de A x 0 y R x 0 tiene una variable libre igual a 1 . Las
otras variables libres son cero. Las soluciones provienen de la forma escalón R :
x1
x 0
1 3 0 2 1 2
Columnas libres y variables libres R x 0 0 1 4 3 x 3 0
0 0 0 0 0 x 4 0
x 5
a) Las variables libres están en negritas. Establezca a la primer variable libre en
x 2 1 con x 4 x5 0 . Las ecuaciones producen las variables pivotes x1 3 y
x 3 0 . Esto dice que la columna 2 (una columna libre) es 3 veces la columna 1 .
Entonces la solución especial es s1 (3,1, 0, 0, 0) .
b) Otra solución especial tiene a x 4 1 . Las otras variables libres son x 2 x5 0 . La
solución especial es s 2 (2, 0, 4,1, 0) . Note a 2 y 4 en R , con signos mas.
c) La tercera solución especial tiene a x5 1 . Con x 2 0 y x 4 0 se encuentra que
s 3 (1, 0, 3, 0, 1) . Los números x1 1 y x 3 3 están en la columna 5 de R , de nuevo
con signos opuestos. Esta es una regla general que pronto se verificará. La matriz
espacio nulo contiene las tres soluciones especiales de sus columnas, es decir,
3 2 1 variables no libre
1 0 0 variable libre
Matriz espacio nulo 0 4 3 variables no libre
0 1 0 variable libre
0 0 1 variable libre
Las combinaciones lineales de esas tres columnas producen a todos los vectores del
espacio nulo. Esta es la solución completa de A x 0 (y R x 0 ). Donde R tuvo a la
matriz identidad ( 2 2 ) en sus columnas pivotes, tuvo a la matriz identidad ( 3 3 )
en sus filas libres.
Hay una solución especial por cada variable libre. Ya que r columnas tienen
pivotes, que dejan n r variables libres. Esta es la clave de A x 0 .
Notas del Ing. José M. Vera Valerio 22 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Teorema 2D:
A x 0 tiene n r variables libres y soluciones especiales: n columnas menos r
columnas pivote. La matriz espacio nulo tiene a n r columnas (las soluciones
especiales).
Cuando se introduzca la idea de vectores “independientes”, se mostrará que las
soluciones especiales son independientes. Se puede ver en que ninguna columna
es combinación de las otras columnas. La cosa bella es que la cuenta es exactamente
correcta:
A x 0 tiene r ecuaciones independientes y n r soluciones independientes.
Para completar esta sección, se regresa de nuevo a las soluciones especiales.
Suponga por simplicidad que las primeras r columnas son las columnas pivotes, y
las últimas n r columnas son libres (sin pivotes). Entonces la forma escalón fila
reducida luce como
I F r filas pivote
R
0 0 m r filas cero (2.6)
r columnas pivotes n r columnas libres
Teorema 2E:
Las variables pivote de las n r soluciones especiales provienen al intercambiar a F
con F :
F r variables pivotes
Matriz espacio nulo (2.7)
I n r variables libres
Revise a R 0 . La primer fila bloque de R es ( I por F )+ ( F por I )=cero.
Las columnas de resuelven a R x 0 . Cuando la parte libre de R x 0 se mueve al
lado derecho, el lado izquierdo mantiene a la matriz identidad:
variables variables
I F (2.8)
pivote libre
En cada solución especial, las variables libre son una columna de I . Entonces las
variables pivote son una columna de F . Esas soluciones especiales producen a la
matriz espacio nulo .
La idea sigue cierta si las columnas pivote se mezclan con las columnas libres.
Entonces I y F se mezclan entre si. Se puede ver aún a F en las soluciones. Aquí
está un ejemplo donde I 1 viene primero y F 2 3 viene a lo último.
Notas del Ing. José M. Vera Valerio 23 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Ejemplo 2.14:
Determine las soluciones especiales de R x x1 2 x 2 3x3 0 si estas provienen de
las columnas de :
2 3
R 1 2 3 1 0
0 1
Solución:
El rango es uno y existen n r 3 1 soluciones especiales (2, 1, 0) y (3, 0, 1) .
La nota final: A se podría reducir a R de diferentes formas. El punto clave es que la
matriz final R siempre es la misma. La matriz original A determina completamente a
I y F , y las filas cero de R , de acuerdo a 3C, es decir,
Las columnas pivote no son combinaciones de las columnas anteriores de A .
Las columnas libres son combinaciones de las columnas anteriores ( F le dice las
combinaciones).
Nota: Un ejemplo pequeño de rango uno mostrará a dos E ' s que producen la correcta
EA R . Sea la matriz A
2 2 1 1
A que se reduce a R y no a otra R
1 1 0 0
I. Se podría multiplicar a la fila 1 de A por 1
2
, y restar la fila 1 de la fila 2 :
1 0 1 / 2 0 1 / 2 0
1 1 0 1 1 / 2 1 E
II. Se podría intercambiar las filas de A , y entonces restar 2 veces la fila 1 de la fila 2 :
1 0 0 1 0 1
2 1 1 0 1 2 E nuevo
III. La multiplicación produce a EA R y también a E nueva A R . Diferentes E ' s pero R
es la misma.
Tarea:
Cual es la matriz espacio nulo (contiene las soluciones especiales) de A , B y C :
Notas del Ing. José M. Vera Valerio 24 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
I I
(a) A I I, (b) B , (c) C I I I
0 0
Solución:
2.4 LA SOLUCIÓN COMPLETA DE LA ECUACIÓN Ax=b
La última sección resolvió totalmente a A x 0 . La eliminación convirtió el problema a
R x 0 . Las variables libres fueron dando valores especiales (uno y cero). Entonces
las variables pivotes se calcularon por sustitución en reversa. No se prestó atención
al lado derecho b debido a que empezó y terminó como cero. La solución x estuvo en
el espacio nulo de A .
Ahora b no es cero. Las operaciones fila sobre el lado izquierdo deben actuar
también sobre el lado derecho. Una forma de organizar eso es agregar a b como
una columna extra de la matriz. Seguimos con el mismo ejemplo de A como antes,
pero se le “aumentó” a A el lado derecho ( b1 , b2 , b3 ) (1, 6, 7 ) :
x1
1 3 0 2 1 1 3 0 2 1
0 0 1 4 x 2 6 tiene la matriz aumentada 0 0 1 4 6 A b
x
1 3 1 6 3 7 1 3 1 6 7
x4
La matriz aumentada es solo A b .
Ahora se aplican los pasos de la eliminación a A , que también se aplican a b . En
este ejemplo se resta la fila 1 de la fila 3 y después se resta la fila 2 de la fila 3 .
Esto produce una fila completa de ceros, es decir,
x1
1 3 0 2 1 1 3 0 2 1
0 0 1 4 x 2 6 tiene la matriz aumentada 0 0 1 4 6 R d
x
0 0 0 0 3 0 0 0 0 0 0
x4
Ese último cero es importante porque significa que las ecuaciónes se pueden
resolver; La tercera ecuación se convierte en 0 0 . En la matriz original A , La
primera fila mas la segunda fila es igual a la tercera fila. Si las ecuaciones son
consistentes, también esto debe ser cierto en el lado derecho de las ecuaciones!
La propiedad importante sobre el lado derecho fué 1 6 7 .
Notas del Ing. José M. Vera Valerio 25 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Aquí están las mismas matrices aumentadas por una b ( b1 , b2 , b3 ) general:
1 3 0 2 b1 1 3 0 2 b1
0 0 1 4 b 0 0 1 4 b
2 2
1 3 1 6 b3 1 3 1 6 b3 b1 b2
Ahora resulta que 0 0 en la tercera ecuación siempre que b3 b1 b2 0 . Es decir
b1 b2 b3 .
UNA SOLUCIÓN PARTICULAR
Del ejemplo A , elija que las variables libres sean x2 x4 0 . Entonces las ecuaciones
dan las variables pivotes x1 1 y x 3 6 . Ellas están en la ulitma columna d de la
matriz aumentada reducida. Primero A y b se reducen a R y d . Las filas cero de R
también deben ser cero en d . Entonces las r variables pivotes de x se toman
directamente de d , debido a que las columnas pivotes de R contienen a la matriz
identidad. Después de la reducción fila solo se resuelve a I x d .
Note como se seleccionan las variables libres (como cero) y resuelven por las
variables pivotes. Después de la reducción fila a R , esos pasos son rápidos. Cuando
las variables libres son cero, las variables pivotes por x p están en la columna extra:
La solución particular resuelve a Axp b
Las n r soluciones especiales resuelven a A x n 0
En este ejemplo la solución particular es (1, 0, 6, 0) . Las dos soluciones especiales
(espacio nulo) de R x 0 provienen de las dos columnas libres de R , al invertir los
signos de 3 , 2 y 4 . Note como se escribe la solución completa x p x n de A x b :
1 3 2
0 1 0
Solución completa: x x p x n x2 x4
6 0 4
0 0 1
Pregunta: Suponga que A es una matriz cuadrada invertible, m n r . Cuales son
x p y xn ?
Respuesta: la solución particular es la única solución de A 1b . No existen soluciones
especiales o variables libres. R I no tiene filas ceros. El único vector en el espacio
nulo es x n 0 . La solución completa es x x p x n A 1b 0 .
Notas del Ing. José M. Vera Valerio 26 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Esta fué la situación del capítulo anterior. Nunca se mencionó en ese capítulo al
espacio nulo. ( A) contuvo solo al vector cero. La reducción va desde A b hasta
I
A 1b . La ecuación original A x b se redujo de toda forma a x A 1b . Este es un
caso especial, pero las matrices cuadradas invertibles son las que más se ven en la
práctica. Tal que ellos tuvieron su propio capítulo al principio del libro.
Por ejemplos pequeños se pone a A b en la forma de escalón fila reducida.
Por una gran matriz, MATLAB puede hacerlo mejor. Aquí esta un ejemplo pequeño con
rango columna completo. Ambas columnas tienen pivotes.
Ejemplo 2.15:
Encuentre la condición sobre ( b1 , b2 , b3 ) para que A x b se resuelva, si
1 1 b1
A 1 2 , b b2
2 3 b3
Esta condición pone a b en el espacio columna de A . Obtenga la solución completa
de x x p x n .
Solución:
Use a la matriz aumentada, con su columna extra b . La eliminación resta la fila 1
de la fila 2 , y suma 2 veces la fila 1 a la fila 3 :
1 1 b1 1 1 b1 1 0 2b1 b2
A 1
2 b2 0
1 b2 b1 0 1 b2 b1
2 3 b3 0 1 b3 2b1 0 0 b3 b1 b2
La última ecuación es 0 0 siempre que b3 b1 b2 0 . Esta es la condición para
poner a b en el espacio columna, es decir, el sistema se puede resolver. Las filas
de A se suman a la fila cero. Entonces por consistencia (son las ecuaciones!) las
entradas de b también deben sumar cero.
Este ejemplo no tiene variables libres ni soluciones especiales. La solución del
espacio nulo es x n 0 . La solución particular (única) x p está en la parte superior
de la columna aumentada:
2b b2 0
x x p xn 1
b2 b1 0
Si b3 b1 b2 no es cero, no existe solución de A x b ( x p no existe).
Notas del Ing. José M. Vera Valerio 27 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Este ejemplo es típico del caso extremadamente importante cuando A tiene su
rango columna completo. Cada columna tiene un pivote. El rango es n r . La matriz
es alta y delgada ( m n ). La reducción fila pone a I arriba, cuando A se reduce a R :
matriz identidad n n I
Rango de columna completo R (2.9)
m n filas de ceros 0
No existen columnas libres o variables libres. La matriz espacio nulo está vacía!
Se describirán las diferentes formas de reconocer a este tipo de matriz.
Teorema 2.F:
Cualquier matriz A con rango de columna completo ( r n ) contiene las propiedades
siguientes:
1. Todas las columnas de A son columnas pivotes.
2. No existen variables libres o soluciones especiales.
3. El espacio nulo ( A) contiene solo al vector cero x 0 .
4. Si A x b tiene una solución (podría no tenerla) entonces esta tiene solamente una
solución.
En este caso el espacio nulo de A se ha encojido al vector cero. La solución
de A x b es única (si esta existe). Existirán m n filas cero ( 3 2 ) en R . De este modo
existen m n condiciones (condición 1 ) sobre b para poder tener a 0 0 en esas filas.
Si b3 b1 b2 0 se satisface, A x b tiene exactamente una solución.
LA SOLUCIÓN COMPLETA
El otro caso extremo es el de rango fila completo. Ahora A x b tiene una solución o
podría tener muchas soluciones. En este caso la matriz A es corta y ancha ( m n ). El
número de incógnitas es al menos el número de ecuaciones. Una matriz tiene rango
fila completo si r m . El espacio nulo de AT se encoje hacia el vector cero. Cada fila
tiene un pivote, aquí está un ejemplo.
Ejemplo 2.16:
Sea el siguiente sistema con n 3 incógnitas, pero solo dos ecuaciones y de rango
r m2:
x y z 3
x 2y z 4
Donde existen dos planos en el espacio x y z que no son paralelos, de tal modo que
ellos intersecan sobre una línea. Determine la solución completa.
Notas del Ing. José M. Vera Valerio 28 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Solución:
Esta línea de soluciones es lo que la eliminación determinará. La solución particular
será un punto sobre esa línea. Además, al sumar los vectores del espacio nulo x n
nos moverá a lo largo de esa línea. Entonces x x p x n produce la línea completa
de soluciones.
Se determina a x p y x n mediante la eliminación al restar la fila 1 de la fila 2 y
después, restar la fila 2 de la fila 1 , es decir,
1 1 1 3 1 1 1 3 1 0 3 2
1 2 1 4 0 1 2 1 0 1 2 1 R d
La solución particular tiene la variable libre x 3 0 y la solución especial a x3 1 :
x particular proviene de d , el lado derecho: x p ( 2 , 1, 0 )
x especial proviene de la tercera columna (columna libre F ) de R : s (3, 2, 1)
Es bueno ver que x p y s satisfacen las ecuaciones originales A x p b y A s 0 :
2 1 3 3 2 1 0
224 3 4 1 0
La solución de espacio nulo x n es cualquier múltiplo de s y se mueve sobre la
línea de soluciones, empezando en x particular . Note de nuevo como es la respuesta:
2 3
Solución completa: x x p x n 1 x3 2
0 1
Esa línea se ve en la Figura 2.3. Cualquier punto en esa linea es una solución
particular. Se elijió el punto con x 3 0 . La solución particular no se multiplica por
una constante arbitraria! La solución especial está y se debe entender porque.
Figura 2.3: La solución completa = solución particular + las soluciones espacio nulo
Notas del Ing. José M. Vera Valerio 29 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Ahora se resume este caso amplio y corto ( m n ) de rango fila completo:
Teorema 2.G:
Cada matriz A con rango fila completo ( r m ) tiene todas estas propiedades:
1. Todas las filas tienen pivotes, y R no tiene filas cero.
2. A x b tiene una solución por cada lado derecho b .
3. El espacio columna es todo el espacio m .
4. Existen n r n m soluciones especiales en el espacio nulo de A .
En este caso con m pivotes, las filas son “linealmente independientes”.Es
decir, las columnas de AT son linealmente independientes. Se está listo para definir
la independencia lineal, tan pronto como se observen las cuatro posibilidades, que
dependen del rango. Note como r , m , n son los números críticos!
Las cuatro posibilidades de las ecuaciones lineales dependen del rango r :
r m y rn Cuadrada e invertible A x b tiene 1 solución
r m y rn Corta y amplia A x b tiene soluciones
rm y rn Alta y delgada A x b tiene 0 o 1 solución
rm y rn Forma desconocida A x b tiene 0 o soluciones
La R reducida caerá en la misma categoría que la matriz A . En el caso de columnas
pivotes sucede que vienen primero, podemos mostrar esas cuatro posibilidades por R :
I I F
R I I F 0 0 0
rmn r mn r nm r m, r n
Casos 1 y 2 tienen rango fila completo r m . Casos 1 y 3 tienen rango columna
completo r n . El caso 4 es el más general en teoría y el menos común en la práctica.
2.5 INDEPENDENCIA, BASE Y DIMENSIÓN
Esta sección ve el verdadero tamaño de un subespacio, donde una matriz m n
tiene n columnas y cada columna tiene m componentes. Pero la verdadera
“dimensión” del espacio columna no es m o n . La dimensión se mide al contar el
número de columnas independientes, y se tiene que decir que significa eso.
La idea de la independencia se aplica a cualquiera de los vectores v1 , , v n de un
espacio vectorial. Esta sección se concentra en los subespacios que se conocen y
usan, en especial el espacio columna de m y el espacio nulo de n . En la última
Notas del Ing. José M. Vera Valerio 30 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
parte se estudian a los “vectores” que no son vectores columna. Ellos pueden ser
matrices y funciones; pueden ser linealmente independientes (o no).
El objetivo final es entender una base de un espacio vectorial, donde una base
contiene a los vectores independientes que “barren el espacio”.
INDEPENDENCIA LINEAL
Definición 2.6: Poco convencional
Las columnas de A son linealmente independientes si la única solución de A x 0
es x 0 . Ninguna otra combinación de las columnas de A x producen al vector cero.
Con columnas linealmente independientes, el espacio nulo ( A) solo tiene al vector
cero. Se ve la independencia lineal (y dependencia lineal) con tres vectores en 3 :
1. Si tres vectores no están en el mismo plano, ellos son independientes. Ninguna
combinación de v1 , v 2 , v 3 de la Figura 2.4 resulta cero excepto 0 v1 0 v 2 0 v 3 .
2. Si tres vectores w1 , w 2 , w 3 están en el mismo plano, ellos son dependientes.
Figura 2.4: Vectores independientes, v’s y dependientes, w´s
Esta idea de independencia aplica a 7 vectores del espacio 12 dimensional. Si
sus columnas en A son independientes, el espacio nulo solo contiene a x 0 . Ahora
se elijen diferentes palabras para expresar la misma idea.
Definición 2.7: Independencia y dependencia lineal
a) Los vectores v1 , , v n son linealmente independiente si la única combinación que
da el vector cero es 0 v1 0 v 2 0 v n . Así, la independencia lineal significa que
x1v1 x 2 v 2 x n v n 0 solo sucede cuando todos los x ' s son cero (2.10)
b) Si una combinación resulta ser 0 , cuando las x' s no todas son cero, entonces los
vectores son dependientes.
Una secuencia de vectores es dependiente o independiente. Se pueden combinar
para dar el vector cero (con x' s no cero) o no pueden. Por tanto, la pregunta clave es:
Notas del Ing. José M. Vera Valerio 31 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
¿Que combinaciones entre los vectores resultan ser cero?
Ejemplos de dos vectores en 2
a) Los vectores (1, 0) y ( 0, 1) son independientes.
b) Los vectores (1, 1) y (1, 0.00001) son independientes.
c) Los vectores (1, 1) y ( 2, 2) son dependientes.
d) Los vectores (1, 1) y ( 0, 0) son dependientes.
Geométricamente, (1, 1) y ( 2, 2) están sobre una línea a través del origen. Ellos no son
independientes. Para usar la definición, encuentre los números x1 y x2 , tal que
x1 (1, 1) x2 ( 2, 2) ( 0, 0)
Esto es lo mismo que resolver la ecuación A x 0 , es decir,
1 2 x1 0
1 2 x 0 x1 2 y x 2 1
2
De la definición, las columnas son dependientes cuando existe un vector no cero en
el espacio nulo. En general si uno de los vectores v ' s es el vector cero, no hay
independencia. ¿Porque no hay?
Ejemplos de tres vectores en 3
Si uno de ellos resulta ser un múltiplo del otro, esos vectores son dependientes. Pero
la prueba completa debe involucrar a los tres vectores al mismo tiempo. El proceso
es ponerlos en una matriz A y tratar de resolver la ecuación A x 0 .
Ejemplo 2.17:
Las columnas de A son dependientes. Entonces A x 0 tiene una solución no cero:
1 0 3 3 0 1 0 3 0
A x 0 A x 2 1 5 1 0 es 3 2 1 1 1 5 0
1 0 3 1 0 1 0 3 0
El rango de A solo es r 2 , por tanto sus columnas son dependientes. Las columnas
independientes deberán resultar en un rango completo r n 3 .
En esa matriz las filas también son dependientes. La fila 1 menos la fila 3 es la
fila cero. Por una matriz cuadrada, se mostrará que columnas dependientes implican
filas dependientes (y vice versa).
Notas del Ing. José M. Vera Valerio 32 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Pregunta: Como calcular la solución de A x 0 ? La forma sistemática es mediante la
eliminación.
1 0 3 1 0 3
A 2 1 5 se reduce a R 0 1 1
1 0 3 0 0 0
La solución x (3, 1, 1) fué exactamente la solución especial. Se demuestra como la
columna libre (columna 3 ) es una combinación de las columnas pivotes. Eso mata a
la independencia!
Teorema 2.H:
Las columnas de A son independientes exactamente cuando el rango es r n .
Existen n pivotes y ninguna variable libre. Solo x 0 está en el espacio nulo.
Solo un caso es de importancia especial debido a que es claro desde el principio.
Suponga que siete columnas tienen cinco componentes cada una ( m 5 es menor
que n 7 ). Entonces las columnas deben ser dependientes. Cualquiera de los siete
vectores de 5 son dependientes. El rango de A no puede ser mayor que 5 . No
pueden existir más de cinco pivotes en las cinco filas. El sistema A x 0 tiene al
menos 7 5 2 variables libres, tal que este tiene soluciones no cero, que significa
que las columnas son dependientes.
Teorema 2.I:
Cualquier conjunto de n vectores en m debe ser linealmente dependiente si n m .
La matriz tiene más columnas que filas, esta es corta y ancha. Las columnas son
realmente dependientes si n m , debido a que A x 0 tiene una solución no cero.
Las columnas podrían ser dependientes o independientes si n m . La eliminación
revela las columnas pivotes. Esto es para aquellas columnas que son independientes.
Ejemplo 2.18:
Muestre que v 1 , v 2 , v 3 son independientes pero v 1 , v 2 , v 3 , v 4 son dependientes:
1 1 1 2
v 1 0 v 2 1 v 3 1 v 4 3
0 0 1 4
Resuelva utilizando, ya sea c1 v1 c 2 v 2 c3 v 3 0 o A x 0 . Los vectores v ' s van en las
columnas de A .
Notas del Ing. José M. Vera Valerio 33 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Solución:
1 1 1 c1 0
0 1 1 c 2 0 c3 c 2 c1 0 independencia lineal
0 0 1 c3 0
v1 v 2 4 v 3 v 4 0 dependencia lineal
Tarea:
Decida la dependencia o independencia de
a) Los vectores (1, 3, 2 ) , (2, 1, 3 ) y (3, 2, 1)
b) Los vectores (1, 3, 2 ) , (2, 1, 3 ) y (3, 2, 1)
Solución:
VECTORES QUE BARREN UN SUBESPACIO
El primer subespacio fué el espacio columna. Empezando con las columnas v1 , , v n ,
el subespacio se llenó al incluir a todas las combinaciones x1v1 x n v n . El espacio
columna consiste de todas las combinaciones de las columnas en A x . Se introduce
la palabra “barrer” para expresar: El espacio columna es barrido por las columnas.
Definición 2.8:
Un conjunto de vectores barren un espacio si sus combinaciones lineales llenan el
espacio.
Ejemplo 2.19:
Los siguientes dos vectores barren todo el espacio de dos dimensiones 2 ,
1 0
v1 y v 2
0 1
Ejemplo 2.20:
Los siguientes tres vectores también barren todo el espacio de dos dimensiones 2 ,
Notas del Ing. José M. Vera Valerio 34 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
1 0 4
v1 , v 2 , v 3
0 1 7
Ejemplo 2.21:
Los siguientes dos vectores solo barren una linea en 2 ,
1 1
w1 y w 2
1 1
También lo hacen solo w1 y solo w 2 .
Piense en dos vectores que salen desde ( 0, 0, 0) en el espacio tridimensional,
usualmente barren un plano. Su mente llena a ese plano al tomar las combinaciones
lineales. Matemáticamente se conocen otras posibilidades: dos vectores barriendo una
línea, tres vectores barriendo a todo 3 , tres vectores barriendo solo un plano. Es
aun posible que tres vectores barran solo una línea, o diez vectores barran solo un
plano. Ellos seguramanete no son independientes!
Las columnas barren el espacio columna. Aquí está un nuevo subespacio, que
es barrido por sus filas. Las combinaciones de sus filas producen el “espacio fila”.
Definición 2.9:
El espacio fila de una matriz es el subespacio de n barrido por las filas.
Las filas de una matriz m n tiene n componentes y son los vectores de n , o
deberían ser si ellos fueran escritos como vectores columna. Existe una forma rápida
de encontrarla: La transpuesta de la matriz. En lugar de las filas de A , se busca en las
columnas de AT . Los mismos números pero ahora en columnas.
El espacio fila de A es C ( A T ) , Este es el espacio columna de AT . Este es un
subespacio de n . Los vectores que lo barren son las columnas de AT , que son las
filas de A .
Ejemplo 2.22:
Describa los subespacios de 3 y 2 barridos por las columnas y filas de la matriz
siguiente,
1 4
1 2 3
A 2 7 AT
3 5 4 7 5
Donde m 3 y n 2 .
Notas del Ing. José M. Vera Valerio 35 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Solución:
El espacio columna de A es barrido por las dos columnas de A . Este es un plano de
3 . El espacio fila de A es barrido por las tres filas de A (columnas de AT ). Este
espacio fila está todo en 2 . Recuerde: Las filas están en n . Las columnas están en
m . Los mismos números, diferentes vectores, diferentes espacios.
Tarea:
Describa el subespacio de 3 (es una línea o plano de 3 ) barridos por
a) Los dos vectores (1, 1, 1) y (1, 1, 1)
b) Los tres vectores (0, 1, 1) , (1, 1, 0) y (0, 0, 0)
c) Las columnas de una matriz escalón 3 5 con dos pivotes
d) Todos los vectores con componentes positivos
Solución:
UNA BASE POR UN ESPACIO VECTORIAL
En el plano xy (en 2 ), un conjunto de vectores independientes podría ser bastante
pequeño, como un solo un vector. Un conjunto que barre a ese plano xy podría ser
grande, como de tres vectores, cuatro, o infinitamente muchos. Es decir, un vector
no barre a ese plano y tres vectores no serán independientes. Lo correcto es una
“base”. Se desean bastantes vectores independientes para barrer a un espacio.
Definición 2.10:
Una base para un espacio vectorial es una secuencia de vectores que tienen dos
propiedades a la vez:
1. Los vectores son linealmente independientes.
2. Los vectores barren el espacio.
Esta combinación de propiedades es fundamental para el Algebra lineal. Cada vector
v en el espacio es una combinación de los vectores base, debido a que ellos barren
el espacio. Mas que eso, la combinación que produce a v es única, debido a que los
vectores base v1 , , v n son independientes:
Existe una y solo una forma de escribir v como una combinación de vectores base.
Notas del Ing. José M. Vera Valerio 36 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Razón: Suponga que v a1v1 a n v n y también v b1v1 bn v n . Por medio de la
resta ( a1 b1 ) v1 ( a n bn ) v n es el vector cero. De la independencia de los v' s ,
cada ai bi 0 . Por consiguiente, a i bi .
Ejemplo 2.23:
Las columnas de la siguiente matriz producen la base estándar por 2 ,
1 0
I
0 1
Solución:
1 0
Los vectores base i y j son independientes. Ellos barren a 2 .
0 1
Todos piensan primero en esa base. El vector i se cruza con el vector j que va
perpendicular. Las columnas de la matriz identidad 3 3 son la base estándar i, j, k .
Las columnas de la matriz identidad n n producen la “base estándar” por n . Ahora
se encuentran otras bases.
Ejemplo 2.24: (Importante)
Las columnas de cualquier matriz invertible n n generan una base para n , es decir,
1 0 0
1 2 1 2
A y A 1 1 0 pero no A
2 5 1 1 1 2 4
Cuando A es invertible, sus columnas son independientes. La única solución que
tiene A x 0 es x 0 . Las columnas barren el espacio completo n , ya que cada
vector b es una combinación de las columnas. A x b se puede resolver siempre por
medio de x A 1b . Se ve que todo concurre por las matrices invertibles?
Teorema 2J:
Los vectores v1 , , v n son una base de n cuando ellos son las columnas de una
matriz invertible n n . De este modo, n tiene infinitamente muchas bases diferentes.
Cuando cualquier matriz tiene columnas independientes, ellas son una base
por su espacio columna. Cuando las columnas son dependientes, se mantienen solo
las columnas pivote, las r columnas con pivotes. ellas son independientes y barren
el espacio columna.
Notas del Ing. José M. Vera Valerio 37 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Teorema 2K:
Las columnas pivote de A son una base de su espacio columna. Las filas pivote de
A o filas pivote de su forma escalón R son una base de su espacio fila.
Ejemplo 2.25:
Esta matriz no es invertible. Sus columnas no son una base para nadie!
2 4 1 2
A R
3 6 0 0
La columna 1 de A es una columna pivote. Esta sola columna es una base de su
espacio columna. La columna 2 debe ser una base diferente. También debe serla
cualquier múltiplo no cero de esa columna. No una escacez de bases! Por eso es
que con frecuencia se hace la elección definida: columnas pivote.
Note que la columna pivote de esta R termina en cero. Esa columna es una base
del espacio columna de R , pero aún no es miembro del espacio columna de A .
Los espacios columna de A y R son diferentes y sus bases son diferentes.
El espacio fila de A es igual al espacio fila de R . Este contiene a ( 2, 4) y a (1, 2) y
a otros múltiplos de esos vectores. Como siempre, existen infinitamente muchas
bases para elegir. Se piensa que la elección más natural es seleccionar las filas no
cero de R (filas con un pivote). Tal que esta matriz A con rango uno tiene solo un
vector en la base, es decir,
2 1
La base por el espacio columna: . La base por el espacio fila: 2
3
Ejemplo 2.26:
Determine las bases por los espacios fila y columna de la siguiente matriz de rango
dos:
1 2 0 3
R 0 0 1 4
0 0 0 0
Solución:
Las columnas 1 y 3 son las columnas pivote y son una base del espacio columna
(de R !). Los vectores en ese espacio columna todos tienen la forma b ( x, y , 0) .
El espacio columna de R es el “plano xy ” dentro del espacio tridimensional xyz .
Este plano no es 2 , es un subespacio de 3 . Las columnas 2 y 3 son una base
por el espacio columna, así como las columnas 1 y 4, y también las columnas 2 y
4. Que pares de columnas de R no son una base de su espacio columna?
Notas del Ing. José M. Vera Valerio 38 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
El espacio fila de R es un subespacio de 4 . La base más simple por ese espacio
fila es el de las dos filas no cero de R . La tercera fila (el vector cero) está en el
espacio fila también. Pero esta no está en una base del espacio fila. Los vectores
base deben ser independientes.
Preguntas:
i. Dados cinco vectores en 7 , como se puede encontrar una base para el espacio
que ellos barren?
Respuesta:
1. Hagalos las filas de A , y elimine determinar las filas no cero de R .
2. Ponga los cinco vectores en las columnas de A y elimine calcular las columnas
pivote (de A no de R !).
ii. Podría otra base tener más vectores, o menos? Esta es una pregunta crucial con
una buena respuesta.
Respuesta:
Todas las bases de un espacio vectorial tienen el mismo número de vectores.
Este número es la “dimensión” del espacio.
Tarea:
La matriz U proviene de A al restar la fila 1 de la fila 3, es decir,
1 3 2 1 3 2
A 0 1 1 U 0 1 1
1 3 2 0 0 0
Encuentre las bases por los dos espacios columna, las bses por los dos espacios fila
y las bases por los dos espacios nulo.
Solución:
DIMENSIÓN DE UN ESPACIO VECTORIAL
Se necesita probar solo lo ya establecido. Existen muchas elecciones por los vectores
base, pero el número de vectores base no cambia.
Teorema 2L:
Si v1 , , v m y w1 , , w n son bases del mismo espacio vectorial, entonces m n .
Notas del Ing. José M. Vera Valerio 39 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Prueba:
Suponga existen más w ' s que v ' s . De n m se desea alcanzar una contradicción.
Los v ' s son una base, tal que w1 debe ser una combinación de los v ' s . Si w1 es
igual a a11v1 a m1v m , entonces es la primera columna de una multiplicación
matricial VA , es decir,
a11
W w1 w2 w 3 v1 v2 v 3 VA
a m1
No se conoce cada a ij , pero se conoce la forma de A ( m n ). El segundo vector
w 2 es también una combinación de los v ' s . Los coeficientes en esa combinación
llenan a la segunda columna de A . La clave es que A tiene una fila por cada v y
una columna por cada w . A es una matriz corta y ancha, debido a que n m .
Existe una solución no cero de A x 0 . Entonces VA x 0 que es W x 0 . Una
combinación de los w ' s produce cero! Los w ' s no pueden ser base, Así que no
puede tener a n m .
Si m n se intercambian los v ' s y w ' s y repiten los mismos pasos. La única forma
de evitar la contradicción es tener a m n . Esto completa la prueba de que m n .
El número de vectores base depende del espacio, no de una base particular. El
número es el mismo para cada base, y dice cuantos “grados de libertad” permite el
espacio vectorial. La dimensión de n es n . Ahora se introduce la palabra dimensión
por otro espacio vectorial también.
Definición 2.11:
La dimensión de un espacio es el número de vectores de cada base.
Esto concuerda con la intuición. La línea a través de v (1, 5, 2) tiene dimensión uno.
Este es un subespacio con un vector v en su base. Perpendicular a esa línea está el
plano x 5 y 2 z 0 . Este plano tiene dimensión 2 . Para probarlo, se determina una
base (5, 1, 0) y (2, 0, 1) . La dimensión es 2 ya que la base tiene dos vectores.
El plano es el espacio nulo de la matriz A 1 5 2 , que tiene dos variables
libre. Nuestros vectores base (5, 1, 0) y (2, 0, 1) son las “soluciones especiales”
de A x 0 . La siguiente sección muestra que las n r soluciones especiales siempre
dan una base para el espacio nulo. Tal que ( A) tiene dimensión n r . Todas las
bases por un espacio tienen el mismo número de vectores.
Nota: Nunca diga “el rango de un espacio” o “la dimensión de una base” o “la base
de una matriz”. Esos términos no tienen significado. Esto es la dimensión del espacio
columna que es igual al rango de una matriz.
Notas del Ing. José M. Vera Valerio 40 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
(*)BASES POR ESPACIOS MATRICIALES Y ESPACIOS FUNCIONES
a) La “independencia”, “base” y “dimensión” no se limitan a los vectores columna.
Ahora se pregunta cuando son independientes tres matrices 3 4 A1 , A2 , A3 .
Ellas son miembro del espacio de todas las matrices 3 4 y alguna combinación
podría determinar la matriz cero. Se puede tambien preguntar cual es la dimensión
del espacio matricial (esta es 12 ).
b) En las ecuaciones diferenciales, el espacio de soluciones de d 2 y / dx 2 y tiene
funciones. Una base es y e x y y e x . Al contar las funciones base se determina
la dimensión 2 (por el espacio de todas las soluciones).
Espacios de matrices:
El espacio vectorial M contiene a todas las matrices 2 2 . Su dimensión es 4 .
1 0 0 1 0 0 0 0
Una base es A1 , A2 , A3 , A4 , , ,
0 0 0 0 1 0 0 1
Esas matrices son linealmente independientes. No se están mirando sus columnas,
sino a toda la matriz. Las combinaciones de esas cuatro matrices pueden producir a
cualquier matriz en M , tal que ellas barran el espacio:
c c3
c1 A1 c 2 A2 c3 A3 c 4 A4 1
c2 c 4
Esta es cero solo si los c' s son todos cero, que prueba la independencia.
Las matrices A1 , A2 , A4 son la base para un subespacio, matrices triangulares
superiores. Su dimensión es 3 . Las matrices A1 y A4 son una base por las matrices
diagonal. Cual es una base por las matrices simétricas? Mantenga a las matrices A1 y
A4 , y descarte a A2 A3 .
Piense acerca del espacio de todas las matrices n n . Por una base, elija a las
matrices que tengan solamente una sola entrada no cero (esa entrada es 1 ). Existen
n 2 posiciones por ese 1 , tal que existen n 2 matrices bases:
La dimensión de todo el espacio matricial n n es n 2 .
La dimensión del subespacio de las matrices triangulares superior es 1
2
n 2 12 n
La dimensión del subespacio de las matrices diagonal es n .
La dimensión del subespacio de las matrices simétricas es 12 n 2 12 n .
Notas del Ing. José M. Vera Valerio 41 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Espacios de funciones:
Las ecuaciones d 2 y / dx 2 0 , d 2 y / dx 2 y y d 2 y / dx 2 y involucran a la segunda
derivada. En cálculo se resuelven para encontrar las funciones y ( x ) :
y 0 se resuelve mediante una función lineal y cx d
y y se resuelve mediante cualquier combinación y c sen x d cos x
y y se resuelve mediante cualquier combinación y ce x de x
El segundo espacio solución tiene a dos funciones base: sen x y cos x . El tercer
espacio solución tiene de funciones base a e x y e x . El primer espacio tiene a x y 1 .
Este es el “espacio nulo” de la segunda derivada! La dimensión es 2 en cada caso
(estas son ecuaciones de segundo orden).
Las soluciones de y 2 no forman un subespacio, el lado derecho b 2 no es
cero. Una solución particular es y ( x ) x 2 . La solución completa es y ( x ) x 2 cx d .
Todas esas funciones satisfacen a y 2 . Vea a la solución particular mas cualquier
función cx d en el espacio nulo. Una ecuación diferencial lineal luce como una
ecuación matricial lineal A x b . Pero se le resuelve por cálculo en lugar de algebra
lineal.
Se termina aquí con el espacio Z que solo tiene al vector cero. La dimensión
de este espacio es cero. El conjunto vacío (no contiene a ningún vector del todo) es
una base. No se permita nunca al vector cero en una base, debido a que se pierde
entonces la independencia lineal.
2.6 DIMENSIONES DE LOS CUATRO SUBESPACIOS
El teorema principal de este capítulo conecta al rango y dimensión. El rango de una
matriz es el número de pivotes. La dimensión de un subespacio es el número de
vectores de una base. Se cuentan los pivotes o se cuentan los vectores base. El
rango de A revela las dimensiones de los cuatro subespacios fundamentales.
Los cuatro subespacios fundamentales, donde dos subespacios provienen
directo desde A , y los otros dos de AT , resultan ser
1) El espacio fila es C ( A T ) , un subespacio de n .
2) El espacio columna es C ( A) , un subespacio de m .
3) El espacio nulo es ( A) , un subespacio de n .
4) El espacio nulo izquierdo es ( A T ) , un subespacio de m (el nuevo espacio).
En este libro el espacio columna y el espacio nulo vienen primero. Se conoce a C ( A)
y ( A) muy bien. Ahora los otros dos espacios vienen por delante. El espacio fila
contiene a todas las combinaciones de las filas. Este es el espacio columna de AT .
Notas del Ing. José M. Vera Valerio 42 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Por el espacio nulo izquierdo se resuelve a A T y 0 , ese sistema es n m . Este
es el espacio nulo de AT . Los vectores y van en el lado izquierdo de A cuando la
ecuación se escribe como y T A 0 T . Las matrices A y AT son diferentes usualmente.
También lo son sus espacios columna y espacios nulo. Pero esos espacios están
conectados de una manera absolutamente bella.
La parte 1 del Teorema fundamental calcula las dimensiones de los cuatro
subespacios. Un hecho que permanece: El espacio fila y el espacio columna tienen
la misma dimensión r (el rango de la matriz). El otro hecho importante es el que
involucra a los dos espacios nulos: Sus dimensiones son n r y m r , para formar a
las dimensiones totales n y m .
La parte 2 del Teorema fundamental describirá como los cuatro subespacios
se ajustan (dos en n y dos en m ). Eso completa “la forma correcta” para entender a
Ax b .
LOS CUATRO SUBESPACIOS DE R
Suponga que A se reduce a su forma escalón fila R . Por esa forma, los cuatro
subespacios son fáciles de identificar. Se encontrará una base por cada subespacio y
revise su dimensión. Entonces se ve como los subespacios cambian (o no cambian!)
como cuando se mira a A . El punto principal es el que las cuatro dimensiones son
las mismas para A y R .
Como un ejemplo específico 3 5 , mire los cuatro subespacios de la matriz
escalón R :
m3 1 3 5 0 9 Filas pivotes 1 y 2
n5 0 0 0 1 8
r2 0 0 0 0 0 Filas pivotes 1 y 4
El rango de esta matriz R es r 2 (dos pivotes). Tome a los subespacios en orden:
1. El espacio fila de R tiene de dimensión 2 , correspondiente al rango.
Razón: Las dos primeras filas son una base. El espacio fila contiene combinaciones
de las tres filas, pero la tercer fila (la fila cero) no agrega nada nuevo. Tal que las filas 1
y 2 barren el espacio fila.
Las filas pivotes 1 y 2 también son independientes. Para este ejemplo, eso es
obvio y siempre es cierto. Si solo se miran a las columnas pivotes, se ve a la matriz
identidad r r . No hay forma de combinar sus filas para producir la fila cero (excepto
por la combinación con todos los coeficientes cero). Así que las r filas pivotes son
independientes y la dimensión es r .
La dimensión del espacio fila es r . Las filas no cero de R forman una base.
Notas del Ing. José M. Vera Valerio 43 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
2. El espacio columna de R también tiene dimensión r 2 .
Razón: Las columnas pivotes 1 y 4 forman una base. Son independientes debido a
que empiezan con la matriz identidad r r . Ninguna combinación de esas columnas
pivotes resultan en la columna cero (excepto la combinación con todos los coeficientes
cero). Además barren al espacio columna. Cualquier otra (libre) columna es una
combinación de los pivotes columna. Realmente las combinaciones que se necesitan
son las tres soluciones especiales:
La columna 2 es 3 (columna 1). La solución especial es (3, 1, 0, 0, 0) .
La columna 3 es 5 (columna 1). La solución especial es (5, 0, 1, 0, 0) .
La columna 5 es 9 (columna 1) +8 (columna 4). Esa solución es ( 9, 0, 0, 8, 1) .
Las columnas pivote son independientes, y barren, tal que son una base de C ( A) .
La dimensión del espacio columna es r . Las columnas pivote forman una base.
3. El espacio nulo tiene de dimensión n r 5 2 . Hay n r 3 variables libres. Aquí
x2 , x3 , x5 son libres (sin pivote esas columnas). Ellas producen las tres soluciones
especiales de Rx 0 . Establezca una variable libre como 1, y resuelva por x1 y x4 :
3 5 9
1 0 0
Rx 0 x x 2 s 2 x3 s 3 x5 s 5
s 2 0 s 3 1 s 5 0
0 0 8
0 0 1
Existe una solución especial por cada una de las variables libre. Con n variables y r
variables pivotes, que dejan n r variables libres y soluciones especiales:
El espacio nulo tiene de dimensión n r . Las soluciones especiales forman una base.
Las soluciones especiales son independientes, ya que tienen a la matriz identidad en
las filas 2, 3, 5. Todas las soluciones resultan ser combinaciones de las soluciones
especiales x x 2 s 2 x3 s 3 x5 s 5 , ya que estas obtienen a x2 , x3 , x5 en las posiciones
correctas. Entonces mediante las ecuaciones Rx 0 , las variables pivotes x1 y x4 se
determinan completamente.
4. El espacio nulo de R T tiene de dimensión a m r 3 2 .
Razón: La ecuación R T y 0 busca las combinaciones de las columnas R T (las filas
de R ) que producen cero. Esta ecuación R T y 0 o y T R 0 T es
Notas del Ing. José M. Vera Valerio 44 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
y1 [1, 3, 5, 0 , 9 ]
y 2 [ 0 , 0 , 0 , 1, 8]
y 3 [ 0, 0, 0, 0, 0 ] (10.11)
[ 0, 0, 0, 0, 0 ]
Las soluciones y1 , y 2 , y 3 son muy claras. Se necesita que y1 0 y y 2 0 . La variable
y 3 es libre (puede ser cualquiera). El espacio nulo de R T tiene a todos los vectores
y ( 0, 0, y 3 ) .
En todos los casos R termina con m r filas cero. Cada combinación de esas
m r filas da cero. Esas son las únicas combinaciones de las filas de R que dan
cero, debido a que las filas pivote son linealmente independientes. Así que se puede
identificar al espacio nulo izquierdo de R , que es el espacio nulo de R T :
RT y 0 : El espacio nulo izquierdo tiene dimensión m r .
Las soluciones son y ( 0, , 0, y r 1 , , y m ) .
Para producir una combinación cero, "y" debe de comenzar con r ceros. Esto deja la
dimensión m r .
Porque este es un “espacio nulo izquierdo”? La razón es que R T y 0 puede ser
transpuesta a y T R 0 T . Ahora y T es un vector fila a la izquierda de R . Se ve que las
y' s de la Ecuación (10.11) multiplican a las filas.
En n el espacio fila y nulo tienen dimensiones r y n r (sumar a n ).
En m el espacio columna y nulo izquierdo tienen dimensiones r y m r (total m ).
Figura 2.5: Las dimensiones de los cuatro subespacios fundamentales por R y A
Notas del Ing. José M. Vera Valerio 45 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
LOS CUATRO SUBESPACIOS DE A
Se necesita de un pequeño trabajo por hacer. Las dimensiones del subespacio por A
son los mismos que por R . El trabajo es explicar porque. Recuerde que esas matrices
están conectadas por una matriz invertible E (el producto de todas las matrices
elementales que reducen de A a R ):
EA R y A E 1 R (2.12)
1. A tiene el mismo espacio fila que R . La misma dimensión r y la misma base.
Razón: Cada fila de A es combinación de las filas de R . También cada fila de R es
una combinación de las filas de A . En una dirección las combinaciones están dadas
por E 1 , en otra dirección por E . La eliminación cambia a las filas, pero los espacios
fila son idénticos.
Desde que A tiene el mismo espacio fila que R , se pueden elegir las primeras
r filas de R como una base. O se pueden elegir las r filas apropiadas de la original
A . Ellas podrían no ser siempre las primeras r filas de A , debido a que podrían ser
dependientes. Las buenas r filas de A son las que terminan como filas pivote de R .
2. El espacio columna de A tiene de dimensión r . Por cada matriz esto es esencial:
El número de columnas independientes es igual al de las filas independientes.
Razón incorrecta: “ A y R tienen el mismo espacio columna”. Esto es falso. Las
columnas de R a veces terminan en ceros. Las columnas de A a veces no terminan
en ceros. Los espacios columna son diferentes, pero su dimensiones son idénticas,
igual a r .
Razón correcta: Las mismas combinaciones de las columnas son cero, por A y R .
Es decir, Ax 0 exactamente cuando Rx 0 . Tal que las r columnas independientes
coinciden.
Conclusión: Las r columnas pivote de A son una base para su espacio columna.
3. A tiene el m ismo espacio nulo que R . La misma dimensión n r y misma base.
Razón: Los pasos de la eliminación no cambian las soluciones. Las soluciones
especiales son una base para este espacio nulo. Existen n r variables libre, tal que
la dimensión es n r . Note que r ( n r ) es igual a n :
(Dimensión del espacio columna)+(Dimensión del espacio nulo)=dimensión de n .
4. El espacio nulo izquierdo de A (el espacio nulo de AT ) tiene la dimensión n r .
Notas del Ing. José M. Vera Valerio 46 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
Razón: AT es una matriz tan buena como A . Cuando se conocen las dimensiones de
cada A , también se conocen las de AT . Su espacio columna se probó que tiene
dimensión r . Desde que AT es n m , el “espacio completo” es ahora m . La regla
de contar por A es r ( m r ) m . Así el espacio nulo de AT tiene dimensión m r .
Ahora se tienen todos los detalles del teorema principal:
Teorema fundamental del Algebra Lineal, Parte 1:
1. El espacio columna y el espacio fila ambos tienen la dimensión r .
2. Los espacios nulo tienen las dimensiones n r y m r .
Al concentrarse sobre los espacios de los vectores, no sobre números individuales o
vectores, se obtienen a esas claras reglas. Pronto las dará por asentadas, empiezan a
verse obvias eventualmente. Pero si se escribe una matriz 11 17 con 187 entradas no
cero, no se ve que mucha gente piense que esos hechos son cierrtos:
dimensión de C ( A) =dimensión de C ( A T )
dimensión de C ( A) +dimensión de ( A) =17
Ejemplo 2.23:
A [1 2 3] tiene a m 1 y rango r 1 .
El espacio fila es una línea en 3 . El espacio nulo es el plano Ax x1 2 x 2 3 x3 0 .
Este plano tiene dimensión 2 (que es 3 1 ). Las dimensiones se suman en 1 2 3 .
Las olumnas de esta matriz 1 3 están en 1 ! El espacio columna está todo en
1 . El espacio nulo izquierdo contiene solo al vector cero. La única solución de A T y 0
es y 0 , la única combinación de la fila que da la fila cero. De este modo ( A T ) es Z ,
el espacio cero con dimensión 0 (que es m r ). En m las dimensiones se suman en
1 0 1.
Ejemplo 2.24:
1 2 3
A tiene a m 2 con n 3 y rango r 1 .
1 2 3
El espacio fila es la misma línea a través de (1, 2, 3) . El espacio nulo es el mismo plano
x1 2 x 2 3 x3 0 . Sus dimensiones aun se suman en 1 2 3 .
Las columnas son jmultiplos de la primera columna (1, 1) . Pero existen más que
el vector cero en el espacio nulo. La rimer fila menos la segunda fila es la fila cero. Por
consiguiente A T y 0 tiene la solución y (1, 1) . El espacio columna y el espacio nulo
son líneas perpendiculares en 2 . Susu dimensiones son 1 y 1 , sumando 2 :
Notas del Ing. José M. Vera Valerio 47 Materia de Algebra Lineal
FACULTAD DE INGENIERÍA UNIVERSIDAD VERACRUZANA
1 1
Espacio columna=línea a través de Espacio nulo izquierdo=línea a través de
1 1
Si A tiene tres filas iguales, su rango es . ¿Cuales son dos de los y' s en su espacio
nulo izquierdo?. Los y ' s combinan las filas para dar a la fila cero.
MATRIZ DE RANGO UNO
El último ejemplo tuvo rango r 1 y las matrices de rango uno son espaeciales. Se
pueden describir a todas. Se verá de nuevo que la dimensión del espacio fila
=dimensión del espacio columna. Cuando r 1 , cada fila es un múltiplo de la misma
fila:
1 2 3 1
2 4 6 2
A es igual a por 1 2 3
3 6 9 3
0 0 0 0
Una columna por una fila ( 4 1 por 1 3 ) produce una matriz ( 4 3 ). Todas las filas son
múltiplos de la fila (1, 2, 3) . Las columnas son múltiplos de la columna (1, 2, 3, 0) . El
espacio fila es una línea en n , y el espacio columna es una línea en m .
Cada matriz de rango uno tiene la forma especial A uv T columna por fila.
Las columnas son múltiplos de u . Las flas son múltiplos de v T . El espacio nulo es el
plano perpendicular a v . ( Ax 0 significa que u (v T x) 0 y entonces v T x 0 ). Esta
ve la perpendicularidad de los subespacios que serán parte del Teorema fundamental.
Notas del Ing. José M. Vera Valerio 48 Materia de Algebra Lineal
También podría gustarte
- Calendario 1 Junio Licenciatura v2 PDFDocumento1 páginaCalendario 1 Junio Licenciatura v2 PDFDaniel UscangaAún no hay calificaciones
- Control de Sistema Masa Resorte y Circuito RL Por Control Basado en ModeloDocumento5 páginasControl de Sistema Masa Resorte y Circuito RL Por Control Basado en ModeloDaniel UscangaAún no hay calificaciones
- Examenfinal PDFDocumento8 páginasExamenfinal PDFDaniel UscangaAún no hay calificaciones
- Calendario 1 Junio Licenciatura v2 PDFDocumento1 páginaCalendario 1 Junio Licenciatura v2 PDFDaniel UscangaAún no hay calificaciones
- Disenio Controladores EstadoDocumento18 páginasDisenio Controladores EstadoDaniel UscangaAún no hay calificaciones
- Definición de Altura de Una Pirámide - Buscar ConDocumento1 páginaDefinición de Altura de Una Pirámide - Buscar ConAle AguilarAún no hay calificaciones
- Clasificación de Cuadriláteros PDFDocumento2 páginasClasificación de Cuadriláteros PDFwilferquiAún no hay calificaciones
- Lista de Útiles Escolares - SegundoDocumento1 páginaLista de Útiles Escolares - SegundoBetsy Enriquez PlancarteAún no hay calificaciones
- Cuarto Examen Geometria Analitica PDFDocumento6 páginasCuarto Examen Geometria Analitica PDFJose Raul Olvera AlcantaraAún no hay calificaciones
- Actividad 3 - La Integral Indefinida, Reglas Básicas de Integración - Revisión Del IntentoDocumento7 páginasActividad 3 - La Integral Indefinida, Reglas Básicas de Integración - Revisión Del Intentojuan lopez100% (1)
- Estimacion Por ParametrosDocumento20 páginasEstimacion Por ParametrosLindsay De La Sota LandaAún no hay calificaciones
- Reporte Curva de Valoracion 7Documento9 páginasReporte Curva de Valoracion 7Carlitos SC100% (1)
- Analisis Del Proceso de Toma de Decisiones VisionDocumento33 páginasAnalisis Del Proceso de Toma de Decisiones VisionJuan Pablo Duarte MorenoAún no hay calificaciones
- Matriz de Decision AbsolutaDocumento2 páginasMatriz de Decision Absolutavilmer HernandezAún no hay calificaciones
- ArbolesDocumento5 páginasArbolesLismar LemaAún no hay calificaciones
- Términos EstadísticosDocumento4 páginasTérminos EstadísticosYuriiko Carrizales HuancaAún no hay calificaciones
- Implementacion de Un Sistema Finaciero para Calzado Anguie de CucutaDocumento120 páginasImplementacion de Un Sistema Finaciero para Calzado Anguie de CucutaPAOLAAún no hay calificaciones
- Solución de Actividades de Aprendizaje Estadistica Inferencial 27marzo06Documento28 páginasSolución de Actividades de Aprendizaje Estadistica Inferencial 27marzo06JORGE LUIS MAYA ALEMANAún no hay calificaciones
- Problemas de Aplicación de Distribución NormalDocumento2 páginasProblemas de Aplicación de Distribución Normalluis barillasAún no hay calificaciones
- Tema - (ACV-S07) Foro de Debate Calificado 05 - EP - Distribución de ProbabilidadDocumento78 páginasTema - (ACV-S07) Foro de Debate Calificado 05 - EP - Distribución de ProbabilidadLorena Meza100% (1)
- Tabla 4 - Chi-CuadradaDocumento1 páginaTabla 4 - Chi-CuadradaAnnel MidAún no hay calificaciones
- Sistemas de Parametros Distribuidos PDFDocumento12 páginasSistemas de Parametros Distribuidos PDFimde2Aún no hay calificaciones
- Entrega 2 Estructuras de DatosDocumento4 páginasEntrega 2 Estructuras de DatosRonald CarvalAún no hay calificaciones
- Regla de Tres Simple para Primero de SecundariaDocumento4 páginasRegla de Tres Simple para Primero de SecundariaElin Diaz LinaresAún no hay calificaciones
- Modelación de Flujo Turbulento Hidráulicamente Liso en Tuberías Largas de PVC PDFDocumento216 páginasModelación de Flujo Turbulento Hidráulicamente Liso en Tuberías Largas de PVC PDFMexichem Colombia S.A.SAún no hay calificaciones
- Origen NumerosDocumento16 páginasOrigen Numerosluis alberto lopezAún no hay calificaciones
- Notas de Bio 2 - MRUVDocumento9 páginasNotas de Bio 2 - MRUVNicolasAún no hay calificaciones
- Resueltos Calculo 2Documento125 páginasResueltos Calculo 2Felipe U. BarberisAún no hay calificaciones
- Mipm U1 A3 RimaDocumento6 páginasMipm U1 A3 RimaLuisa Mee 666Aún no hay calificaciones
- Practica 01 - Habilidad Operativa, Operac. Fundamentales, Sucesiones y SeriesDocumento4 páginasPractica 01 - Habilidad Operativa, Operac. Fundamentales, Sucesiones y SeriesRodrigoAún no hay calificaciones
- Movimiento Armónico Simple (MAS)Documento4 páginasMovimiento Armónico Simple (MAS)Juan Gerardo Maldonado CalderaAún no hay calificaciones
- Como Limpiar Arma de Fuego y CuidadosDocumento53 páginasComo Limpiar Arma de Fuego y CuidadosLuisEduardo Zuleta OBrianAún no hay calificaciones
- Laboratorio 2Documento8 páginasLaboratorio 2ERIC GEOVANY RAMOS ROJASAún no hay calificaciones
- Act 1 FuncionesDocumento13 páginasAct 1 FuncionesdavidrussovAún no hay calificaciones
- Metodología para La Solución de Problemas Por Medio de ComputadoraDocumento7 páginasMetodología para La Solución de Problemas Por Medio de ComputadoraMichael MoraAún no hay calificaciones