También podría gustarte
- Hojas de Actividades 1 y 2 La Idea Mas Brillante.Documento3 páginasHojas de Actividades 1 y 2 La Idea Mas Brillante.Viko Morales100% (1)
- Lista de Alumnos Con Deudas PDFDocumento1 páginaLista de Alumnos Con Deudas PDFViko MoralesAún no hay calificaciones
- Purificadora LIENZO CANVASDocumento2 páginasPurificadora LIENZO CANVASViko Morales100% (2)
- Defensa - Del.proyecto.29-05-2020 CaeDocumento10 páginasDefensa - Del.proyecto.29-05-2020 CaeViko MoralesAún no hay calificaciones
- Actividades de Cadcam 6802 para La Cuarentena Propiciada Por El Covid-09Documento1 páginaActividades de Cadcam 6802 para La Cuarentena Propiciada Por El Covid-09Viko MoralesAún no hay calificaciones
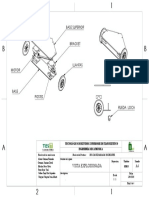
- V - ExplosionadaDocumento1 páginaV - ExplosionadaViko MoralesAún no hay calificaciones
- Fuente de Alimentación y EncoderDocumento13 páginasFuente de Alimentación y EncoderViko MoralesAún no hay calificaciones
- La Noche Más LargaDocumento10 páginasLa Noche Más LargaViko MoralesAún no hay calificaciones
- MT Sistemas CCTVDocumento5 páginasMT Sistemas CCTVViko MoralesAún no hay calificaciones
- Serie de Ejercicios U 3 EstaticaDocumento13 páginasSerie de Ejercicios U 3 EstaticaViko MoralesAún no hay calificaciones
- Cómo Llevar Tu Perro de PaseoDocumento2 páginasCómo Llevar Tu Perro de Paseoomjgp123Aún no hay calificaciones
- Similitudes y Diferencias Procedimiento ConcursalDocumento2 páginasSimilitudes y Diferencias Procedimiento ConcursalLucia Del Pilar Campoverde AlfaroAún no hay calificaciones
- Copia de Planificacion Diagnostico 2022 Pre Kinder ADocumento9 páginasCopia de Planificacion Diagnostico 2022 Pre Kinder AMariam sahoneroAún no hay calificaciones
- Resumen de La Ley General de SociedadesDocumento25 páginasResumen de La Ley General de SociedadesEdgar Flores Ayna100% (3)
- Tokuda Oyafuso Javier ArturoDocumento56 páginasTokuda Oyafuso Javier ArturoRosa juarez mateoAún no hay calificaciones
- Encendido Jeep Cherokee, RamDocumento14 páginasEncendido Jeep Cherokee, RamRoberto Lopez HernandezAún no hay calificaciones
- Etapas Del Plan de Gestión Del Tiempo en Un ProyectoDocumento2 páginasEtapas Del Plan de Gestión Del Tiempo en Un ProyectoLaura Zamudio RamirezAún no hay calificaciones
- Marco TeoricoDocumento25 páginasMarco Teoriconayeli garcia100% (3)
- Temario Ventas y NegociacionDocumento8 páginasTemario Ventas y NegociaciontaitaluisAún no hay calificaciones
- Unidad V La NegociaciónDocumento31 páginasUnidad V La NegociaciónMiguel VencesAún no hay calificaciones
- Mantenimiento ACCVDocumento5 páginasMantenimiento ACCVChriistianRDresdner100% (1)
- PLATILLA EXCEL - TABLAS DE FRECUENCIA 2 CamiloDocumento15 páginasPLATILLA EXCEL - TABLAS DE FRECUENCIA 2 Camilocamilo andres suarez sanchezAún no hay calificaciones
- CASO de ESTUDIO 1 - Border States Industries Alimenta El Crecimiento Rápido Con ERPDocumento5 páginasCASO de ESTUDIO 1 - Border States Industries Alimenta El Crecimiento Rápido Con ERPalejandra rojasAún no hay calificaciones
- Taller de Programacion para NiñosDocumento12 páginasTaller de Programacion para NiñosCRISTIAN DAVID AGREDO TREJOSAún no hay calificaciones
- Bomba de Direccion Pruebas y AjustesDocumento16 páginasBomba de Direccion Pruebas y AjustesCarloncho HFAún no hay calificaciones
- Revistra Tierra Derecha Programa Sporting Viernes 12 de Junio de 2020 PDFDocumento115 páginasRevistra Tierra Derecha Programa Sporting Viernes 12 de Junio de 2020 PDFJuan CarlosAún no hay calificaciones
- Síntesis Metodo FIFO y PromedioDocumento8 páginasSíntesis Metodo FIFO y PromedioYanina AlvarezAún no hay calificaciones
- 01 - Libro de Windows 10Documento47 páginas01 - Libro de Windows 10Edgardo XaisAún no hay calificaciones
- Factibilidad de Ventas de CremaDocumento20 páginasFactibilidad de Ventas de CremagmielesAún no hay calificaciones
- Principios de MacroeconomiaDocumento38 páginasPrincipios de MacroeconomiaWilliams B. Mendoza FernandezAún no hay calificaciones
- PAEF BancolombiaDocumento5 páginasPAEF BancolombiaLeonardo HerreraAún no hay calificaciones
- Autoevaluación N°1 - Gerencia de OpDocumento4 páginasAutoevaluación N°1 - Gerencia de OpShirley FCAún no hay calificaciones
- Registro de DerramesDocumento45 páginasRegistro de DerramesSebastian Leonardo HuarachiAún no hay calificaciones
- Proyedc Grupo 3Documento25 páginasProyedc Grupo 3Oscar Sebastian Diaz CelizAún no hay calificaciones
- Tarea Tema 2Documento97 páginasTarea Tema 2LukeAún no hay calificaciones
- Accion de Cumplimiento OnpDocumento6 páginasAccion de Cumplimiento OnpAbogadoJulioLeónAún no hay calificaciones
- Contactos Mujeres Usera Particular en MadridDocumento2 páginasContactos Mujeres Usera Particular en MadridConocer mujeres en MadridAún no hay calificaciones
- 18-03-2023 - Obligaciones - 1er Parcial - NGDocumento14 páginas18-03-2023 - Obligaciones - 1er Parcial - NGGustavo MurisengoAún no hay calificaciones
- Procesos Civiles y Comerciales - TP 3 - Pablo BassoDocumento7 páginasProcesos Civiles y Comerciales - TP 3 - Pablo BassoPablo BassoAún no hay calificaciones
- Estacionamiento y TerminalesDocumento45 páginasEstacionamiento y TerminalesSARAAún no hay calificaciones
- Informe MeloDocumento11 páginasInforme MeloHugo Raul FloresAún no hay calificaciones