También podría gustarte
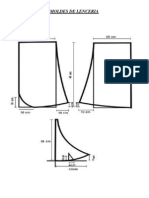
- Moldes de Lenceria PDFDocumento18 páginasMoldes de Lenceria PDFPablo Sarango100% (8)
- Estudios Sobre El AmorDocumento88 páginasEstudios Sobre El AmorEzequiel BollatiAún no hay calificaciones
- Normas MotoresDocumento4 páginasNormas MotoresLuis Gabriel Mecon CastilloAún no hay calificaciones
- Servicio de Mensajes Cortos (SMS) el Mercado Telefónico de EspañaDe EverandServicio de Mensajes Cortos (SMS) el Mercado Telefónico de EspañaAún no hay calificaciones
- Cable SHD-GC, 5KV, 8KV y 15KVDocumento3 páginasCable SHD-GC, 5KV, 8KV y 15KVRAULAún no hay calificaciones
- LMT 33 KV y Set 33-13,2 KV Parque Industrial Santo TomeDocumento122 páginasLMT 33 KV y Set 33-13,2 KV Parque Industrial Santo TomeAriel Walter GuimardAún no hay calificaciones
- Laseres de Fibra OpticaDocumento31 páginasLaseres de Fibra OpticaJuan CarlosAún no hay calificaciones
- ISO 10014 2021 Orientaciones para Obtener Beneficios Económicos y FinancierosDocumento26 páginasISO 10014 2021 Orientaciones para Obtener Beneficios Económicos y FinancierosKarla O. Rodriguez100% (2)
- Cable Media Tension Ficha Tecnica EsDocumento4 páginasCable Media Tension Ficha Tecnica EsJose Quijije MoreiraAún no hay calificaciones
- 002 Líneas y ConectoresDocumento24 páginas002 Líneas y ConectoresxendikaAún no hay calificaciones
- Componentes de ControlDocumento31 páginasComponentes de ControlalvaritoignacioAún no hay calificaciones
- Maquinas SincronasDocumento9 páginasMaquinas SincronasrodrigogeronAún no hay calificaciones
- Conclusion EsDocumento2 páginasConclusion EsRodrigo Gutierrez Guadarrama0% (1)
- Clasificación de Los Motores EléctricosDocumento8 páginasClasificación de Los Motores EléctricosJuan Ignacio HernándezAún no hay calificaciones
- Mosfets y ArduinoDocumento5 páginasMosfets y Arduinopeto ricAún no hay calificaciones
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadDe EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadAún no hay calificaciones
- Seguridad y Respaldo en Base de DatosDocumento15 páginasSeguridad y Respaldo en Base de Datoscarlos0% (2)
- Lab11 MaquinasDocumento7 páginasLab11 MaquinasAlvaro RoqueAún no hay calificaciones
- Motores LinealesDocumento49 páginasMotores LinealesJuan D Agredo100% (1)
- Metodo Ikigai Muenala SergioDocumento5 páginasMetodo Ikigai Muenala SergioEl Raptor RebeldeAún no hay calificaciones
- Conduct Electric A ReosDocumento5 páginasConduct Electric A Reosfc08042gnu7927Aún no hay calificaciones
- Televisor Láser: Llévate el cine a casa con una impresionante experiencia 4K Ultra-HDDe EverandTelevisor Láser: Llévate el cine a casa con una impresionante experiencia 4K Ultra-HDAún no hay calificaciones
- Sintaxis Básica ArduinoDocumento8 páginasSintaxis Básica ArduinoPablo Sarango100% (1)
- Diseño Lineas Aereas 1Documento63 páginasDiseño Lineas Aereas 1Flory Espinoza0% (1)
- Componentes de Una Subestacion ElectricaDocumento17 páginasComponentes de Una Subestacion ElectricaRoimer SolorzanoAún no hay calificaciones
- Apuntes Subestaciones GeneralDocumento19 páginasApuntes Subestaciones GeneralJPAún no hay calificaciones
- Motores de Paso PDFDocumento19 páginasMotores de Paso PDFChristian Camacho100% (1)
- Factor de Potencia y ArmonicosDocumento11 páginasFactor de Potencia y ArmonicoszirckoAún no hay calificaciones
- Montaje en Poste de Transformador Trifasico Con Circuito Primario y Red Trenzada de Baja Tension 1 - 18 - 2010 - 10 - 31 - 15 - AM - CTU 500-1Documento3 páginasMontaje en Poste de Transformador Trifasico Con Circuito Primario y Red Trenzada de Baja Tension 1 - 18 - 2010 - 10 - 31 - 15 - AM - CTU 500-1Aldo CorpAún no hay calificaciones
- BOBINASDocumento13 páginasBOBINASCarlos LinoAún no hay calificaciones
- Control de Motores de Corriente ContinuaDocumento11 páginasControl de Motores de Corriente ContinuaTomislav SimunovicAún no hay calificaciones
- Diseño Con Datos PareadosDocumento3 páginasDiseño Con Datos PareadosKaren ArteagaAún no hay calificaciones
- Motor LinealDocumento5 páginasMotor LinealJuan MatuteAún no hay calificaciones
- CABLEADODocumento60 páginasCABLEADOGabriela NavarroAún no hay calificaciones
- Swt3000 Broschuere SPDocumento18 páginasSwt3000 Broschuere SPLuis Aguero CantilloAún no hay calificaciones
- Arranque Con Autotransformador Con Motor Electrico Jaula de ArdillaDocumento10 páginasArranque Con Autotransformador Con Motor Electrico Jaula de ArdillaCERVANTES FERNANDEZ MIJAELAún no hay calificaciones
- Manual Doble Velocidad - Dahlander PDFDocumento8 páginasManual Doble Velocidad - Dahlander PDFAnonymous unHdKzaevUAún no hay calificaciones
- (Siemens) Swt3000-Broschuere-Sp PDFDocumento18 páginas(Siemens) Swt3000-Broschuere-Sp PDFJarimyeaAún no hay calificaciones
- APUNTE DE TRANSMISION Def 2Documento97 páginasAPUNTE DE TRANSMISION Def 2Juan Ma100% (1)
- AsincronoDocumento5 páginasAsincronoSherlockAún no hay calificaciones
- Caracterización y Cálculo Del Circuito Equivalente de Un Motor de Inducción Desde La Placa de CaracterísticasDocumento11 páginasCaracterización y Cálculo Del Circuito Equivalente de Un Motor de Inducción Desde La Placa de CaracterísticasLuis Eugenio Hernandez QuijaiteAún no hay calificaciones
- Motores DCDocumento41 páginasMotores DCJohan CruzAún no hay calificaciones
- Rectificador de TracciónDocumento8 páginasRectificador de TracciónAndre AguilarAún no hay calificaciones
- Aerogenerador VerticalDocumento3 páginasAerogenerador VerticalSebastian GranadosAún no hay calificaciones
- TABLAS de La NOM-2012 - 19 Mar. 2013Documento21 páginasTABLAS de La NOM-2012 - 19 Mar. 2013Bilan BalcazarAún no hay calificaciones
- Programa+de+mantenimiento+preventivo+a+máquinas+eléctricas+de+corriente+alterna+en+la+empresa+papel+TITAN,+S A +de+c V ,+ubicada+en+Tizayuca+HidalgoDocumento174 páginasPrograma+de+mantenimiento+preventivo+a+máquinas+eléctricas+de+corriente+alterna+en+la+empresa+papel+TITAN,+S A +de+c V ,+ubicada+en+Tizayuca+HidalgoleslieAún no hay calificaciones
- Arranque de Motores Estrella TrianguloDocumento3 páginasArranque de Motores Estrella TrianguloshenseyAún no hay calificaciones
- OPU-1 Sistema de Onda Portadora Universal - Descripción Rev.2 Febrero 2010Documento86 páginasOPU-1 Sistema de Onda Portadora Universal - Descripción Rev.2 Febrero 2010LucasPorras100% (1)
- Control de Motores CCDocumento3 páginasControl de Motores CCFrancisco CornejoAún no hay calificaciones
- Informe Subestacion TotorasDocumento16 páginasInforme Subestacion TotorasSanty Amores100% (1)
- Cajas de Dispersion InformeDocumento10 páginasCajas de Dispersion InformeCarlos EvalaAún no hay calificaciones
- Aerogenerador de Eje Horizontal SavoniusDocumento6 páginasAerogenerador de Eje Horizontal SavoniusirvingAún no hay calificaciones
- Circuitos RecortadoresDocumento6 páginasCircuitos RecortadoresChristianJesusPalominoPachecoAún no hay calificaciones
- Trabajo de Motores de Corriente ContinuaDocumento3 páginasTrabajo de Motores de Corriente ContinuaWilson Rafael Cañate OliverosAún no hay calificaciones
- Fallas en Motores ElectricosDocumento13 páginasFallas en Motores ElectricosGio RzzAún no hay calificaciones
- Formato Memoria ExplicativaDocumento3 páginasFormato Memoria ExplicativaMario SaezAún no hay calificaciones
- Motor ElectricoDocumento22 páginasMotor ElectricoMario GonzalezAún no hay calificaciones
- Piedras EsmerilDocumento19 páginasPiedras Esmerilfredy ortiz100% (1)
- Por Qué Un Motor CA Necesita Un Capacitor para ArrancarDocumento3 páginasPor Qué Un Motor CA Necesita Un Capacitor para ArrancarSandrita L JaramilloAún no hay calificaciones
- Principios Generales de Las Máquinas EléctricasDocumento13 páginasPrincipios Generales de Las Máquinas EléctricasAlicer RelamiAún no hay calificaciones
- 21 - Proteccion Diferencial de Voltaje Con Acopladores LinealesDocumento4 páginas21 - Proteccion Diferencial de Voltaje Con Acopladores LinealeshakashuAún no hay calificaciones
- Diseño para Bancos de Ensayos de Maquinas Estaticas y Rotativas Unefanb Nucleo Miranda Los TequesDocumento108 páginasDiseño para Bancos de Ensayos de Maquinas Estaticas y Rotativas Unefanb Nucleo Miranda Los TequesRenny HernandezAún no hay calificaciones
- Sistema Ward LeonardDocumento5 páginasSistema Ward LeonardMary CorralAún no hay calificaciones
- 3.3 Escaleras Elts.Documento22 páginas3.3 Escaleras Elts.LAFUENTE TITO LEONEL100% (1)
- Guia para El Comprador Transformadores de Medida Exteriores Ed4.1Documento64 páginasGuia para El Comprador Transformadores de Medida Exteriores Ed4.1franzabel100% (2)
- Bancos de CondensadoresDocumento3 páginasBancos de CondensadoresNiltonGonzalesAún no hay calificaciones
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareDe EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareAún no hay calificaciones
- Diseño Construcción y Control de Un Insecto RobotDocumento162 páginasDiseño Construcción y Control de Un Insecto RobotPablo SarangoAún no hay calificaciones
- Manual de Montaje Power CodeDocumento91 páginasManual de Montaje Power CodespeculumrotaeAún no hay calificaciones
- El Amplificador en Emisor ComúnDocumento17 páginasEl Amplificador en Emisor ComúnPablo SarangoAún no hay calificaciones
- El Amplificador en Emisor ComúnDocumento18 páginasEl Amplificador en Emisor ComúnPablo SarangoAún no hay calificaciones
- Ventajas y Desventajas de Los Diferentes Métodos AnticonceptivosDocumento5 páginasVentajas y Desventajas de Los Diferentes Métodos AnticonceptivosPablo SarangoAún no hay calificaciones
- SXSG EJ23 Proyecto FinalDocumento3 páginasSXSG EJ23 Proyecto FinalorlandoAún no hay calificaciones
- Teoria CelularDocumento7 páginasTeoria CelularAsh SttylesAún no hay calificaciones
- Super Aluminio p3 ALDocumento2 páginasSuper Aluminio p3 ALtenshin1110% (1)
- Etica 11 e 161623882296Documento1 páginaEtica 11 e 161623882296cabrera v2wAún no hay calificaciones
- La Evaluación de Impactos Ambientales (EIA) y Un Modelo de Desarrollo LocalDocumento11 páginasLa Evaluación de Impactos Ambientales (EIA) y Un Modelo de Desarrollo LocalErnesto G. Pirillo100% (1)
- La Escala Geologica Del TiempoDocumento37 páginasLa Escala Geologica Del TiempojulioAún no hay calificaciones
- Mozart y La BallenaDocumento9 páginasMozart y La BallenaYvonne Rojas Cáceres0% (1)
- Estudio Hidrologico Del Rio ChicamaDocumento44 páginasEstudio Hidrologico Del Rio ChicamaVictor SaavedraAún no hay calificaciones
- SuelosDocumento13 páginasSuelosroyerAún no hay calificaciones
- Gre - Eec.g.99.co. P.10036.50.401.07 Procedimient'o Excabacion ActualizadoDocumento52 páginasGre - Eec.g.99.co. P.10036.50.401.07 Procedimient'o Excabacion Actualizadoangelo sotoAún no hay calificaciones
- Perfil Del Orientador FamiliarDocumento2 páginasPerfil Del Orientador FamiliarAndres Pastor100% (1)
- Monografía - 'La Lotería en Babilonia'Documento4 páginasMonografía - 'La Lotería en Babilonia'TinchenkoAún no hay calificaciones
- Asistente de OfimaticaDocumento17 páginasAsistente de OfimaticaRoberto VelasquezAún no hay calificaciones
- 21 11 19Documento2 páginas21 11 19Brady Franco Rojas100% (1)
- Proyecto de Banca JuvenilDocumento3 páginasProyecto de Banca JuvenilLeonardo Gutierrez.Aún no hay calificaciones
- CR PresupuestoDocumento1 páginaCR PresupuestoSanchez GedeonAún no hay calificaciones
- Plantilla Propuesta Correccion PDFDocumento3 páginasPlantilla Propuesta Correccion PDFNATALY MARTINEZ RODRIGUEZAún no hay calificaciones
- Componentes de Un RobotDocumento7 páginasComponentes de Un RobotMarilyn AlvaAún no hay calificaciones
- Estructuras MetalicasDocumento15 páginasEstructuras MetalicasJohanna NietoAún no hay calificaciones
- Anthony, Piers - Desafio Total (1989)Documento174 páginasAnthony, Piers - Desafio Total (1989)kafkakafkaseñorKAún no hay calificaciones
- Cornell-Tutorial de DigitalizaciónDocumento58 páginasCornell-Tutorial de DigitalizaciónSebaMastropieroAún no hay calificaciones
- El EmpowermentDocumento12 páginasEl Empowermentyajaira reyesAún no hay calificaciones
- Enzimas PDFDocumento2 páginasEnzimas PDFAchikillaAún no hay calificaciones
- Técnicas de ExcavaciónDocumento5 páginasTécnicas de ExcavaciónYANETH KIMBERLY VILLCA MAMANIAún no hay calificaciones