También podría gustarte
- Retroalimentación FormativaDocumento1 páginaRetroalimentación FormativaTauyiro BeatsAún no hay calificaciones
- PARCIAL 2do CORTE DE BASE DE DATOSDocumento14 páginasPARCIAL 2do CORTE DE BASE DE DATOSTauyiro BeatsAún no hay calificaciones
- Memoización 2Documento16 páginasMemoización 2Tauyiro BeatsAún no hay calificaciones
- Parcial 3Documento1 páginaParcial 3Tauyiro BeatsAún no hay calificaciones
- Informe FinalDocumento145 páginasInforme FinalTauyiro BeatsAún no hay calificaciones
- Atributosdecalidadeneldesarrollodesoftware 170224051429Documento24 páginasAtributosdecalidadeneldesarrollodesoftware 170224051429Tauyiro BeatsAún no hay calificaciones
- Pendulo Simple InformeDocumento4 páginasPendulo Simple InformeTauyiro Beats100% (1)
- Taller 3 Leyes de KirchhoffDocumento8 páginasTaller 3 Leyes de KirchhoffTauyiro BeatsAún no hay calificaciones
- Eval. Acumulativa 1° MedioDocumento2 páginasEval. Acumulativa 1° MedioLuiçao Jesús Do Jaramilho YanhesAún no hay calificaciones
- Evolucion Historica Del Concepto de Movimiento FisicaDocumento7 páginasEvolucion Historica Del Concepto de Movimiento Fisicaammahil100% (2)
- Cómo Se Mide La Pobreza...Documento5 páginasCómo Se Mide La Pobreza...solcito_ceballosAún no hay calificaciones
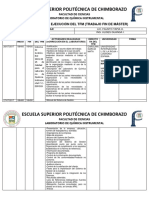
- Cronograma de Ejecución Del TFMDocumento4 páginasCronograma de Ejecución Del TFMOdso RobertAún no hay calificaciones
- Respeto A Las MinoriasDocumento1 páginaRespeto A Las Minoriascordovacruz19Aún no hay calificaciones
- Marta Nussbaum 2019Documento28 páginasMarta Nussbaum 2019mjlopemeAún no hay calificaciones
- Patologías Del ÚteroDocumento46 páginasPatologías Del ÚteroCristhian Xavier Chica LozadaAún no hay calificaciones
- Cuarta UnidadDocumento5 páginasCuarta UnidadMiguelAngelPaucarContrerasAún no hay calificaciones
- Alaba A DiosDocumento3 páginasAlaba A DiosEdgxr DxnielAún no hay calificaciones
- Syllabus Del Curso de Fundamentos y Generalidades de InvestigaciónDocumento10 páginasSyllabus Del Curso de Fundamentos y Generalidades de InvestigaciónJose Fernelly Jimenez NigroAún no hay calificaciones
- ¿Qué Es Un Diagrama de GanttDocumento3 páginas¿Qué Es Un Diagrama de Ganttbto840531100% (1)
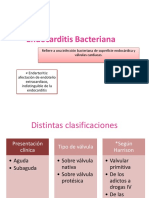
- Endocarditis Bacteriana: Refiere A Una Infección Bacteriana de Superficie Endocárdica y Válvulas CardiacasDocumento20 páginasEndocarditis Bacteriana: Refiere A Una Infección Bacteriana de Superficie Endocárdica y Válvulas CardiacasluisAún no hay calificaciones
- Diagnostico y Tratamiento Del SincopeDocumento6 páginasDiagnostico y Tratamiento Del SincopeJOSEAún no hay calificaciones
- Cuestionario Gestion de Calidad (Con Respuestas)Documento4 páginasCuestionario Gestion de Calidad (Con Respuestas)Gustavo Eliecer Florez Martinez100% (3)
- Resumen Hacia Una Escuela para Todos y Con TodosDocumento5 páginasResumen Hacia Una Escuela para Todos y Con TodosAnyifer AleyAún no hay calificaciones
- Catecismo de La Iglesia Catolica y El InfiernoDocumento10 páginasCatecismo de La Iglesia Catolica y El InfiernoNapoleonperezAún no hay calificaciones
- PROYECTO DE INTERVENCIÓN PSICOSOCIAL - TarapotoDocumento75 páginasPROYECTO DE INTERVENCIÓN PSICOSOCIAL - TarapotoJose Ucañan RoblesAún no hay calificaciones
- Dosificación Secundaria 2 2022Documento19 páginasDosificación Secundaria 2 2022Sergio Ramírez GonzálezAún no hay calificaciones
- De Lucia Persecucion Protestantismo Italia PDFDocumento38 páginasDe Lucia Persecucion Protestantismo Italia PDFAlberto DibAún no hay calificaciones
- Cuadro Comparativo - Metodo Cualitativo VS CuantitativoDocumento2 páginasCuadro Comparativo - Metodo Cualitativo VS CuantitativoKaren Gomez JAún no hay calificaciones
- Eficacia y Seguridad de MedicamentosDocumento19 páginasEficacia y Seguridad de MedicamentosOscar100% (1)
- Actividad 4Documento4 páginasActividad 4Anderson CruzAún no hay calificaciones
- 5t0 Semana 10 Trimestre 1 de 5toDocumento29 páginas5t0 Semana 10 Trimestre 1 de 5tojuan carlosAún no hay calificaciones
- Carrión Feijoo Cinthia Thalia - PrácticaNº9 PDFDocumento3 páginasCarrión Feijoo Cinthia Thalia - PrácticaNº9 PDFCinthia CarrionAún no hay calificaciones
- MHT PDFDocumento61 páginasMHT PDFenriqueAún no hay calificaciones
- Proyecto Integrador Exportación MangosDocumento16 páginasProyecto Integrador Exportación MangosMarley Armijos DiazAún no hay calificaciones
- Teorias Generales y Regionales de La ArquitecturaDocumento14 páginasTeorias Generales y Regionales de La ArquitecturaCid CamperoAún no hay calificaciones
- Campomanes, Pedro Rodríguez - Tratado Sobre La RegalíaDocumento326 páginasCampomanes, Pedro Rodríguez - Tratado Sobre La RegalíaFranco Federico LoyolaAún no hay calificaciones
- CEI+Vol 9no 1+31-35Documento5 páginasCEI+Vol 9no 1+31-35Christian GuerraAún no hay calificaciones
- Programa de Santa Cena 2020Documento28 páginasPrograma de Santa Cena 2020Artüro ValdesAún no hay calificaciones