También podría gustarte
- Polarizacion de Transistores A La Inversa 15 Al 25Documento6 páginasPolarizacion de Transistores A La Inversa 15 Al 25Diego Escobar MoncadaAún no hay calificaciones
- Laboratorio 1a 2 PDFDocumento2 páginasLaboratorio 1a 2 PDFDiego Escobar MoncadaAún no hay calificaciones
- Solvent de 2 Qal 2Documento3 páginasSolvent de 2 Qal 2Diego Escobar MoncadaAún no hay calificaciones
- Tehcnaai Compresor KeDocumento9 páginasTehcnaai Compresor KeDiego Escobar MoncadaAún no hay calificaciones
- Parcial 2 de Oscilaciones y OndasDocumento2 páginasParcial 2 de Oscilaciones y OndasDiego Escobar MoncadaAún no hay calificaciones
- Programa Analitico de OndasDocumento9 páginasPrograma Analitico de OndasDiego Escobar MoncadaAún no hay calificaciones
- Guia de SoldaduraDocumento7 páginasGuia de SoldaduraDiego Escobar MoncadaAún no hay calificaciones
- 02 REINTERPRETACION GENERO TEMA ICONOG X 1 PDFDocumento112 páginas02 REINTERPRETACION GENERO TEMA ICONOG X 1 PDFBibix AltamarAún no hay calificaciones
- Resumen 7 Habitos de Los Adolescentes Altamente ExitososDocumento2 páginasResumen 7 Habitos de Los Adolescentes Altamente ExitososSergio García RamírezAún no hay calificaciones
- La Piramide - SarmientoDocumento4 páginasLa Piramide - SarmientosdfsfsAún no hay calificaciones
- POLIGONOS Presentación de Mate FINALDocumento25 páginasPOLIGONOS Presentación de Mate FINALElizabeth RiosAún no hay calificaciones
- TOSTADEROSDocumento3 páginasTOSTADEROSBryan Anthony Aranda CastilloAún no hay calificaciones
- Clasificacion de Brazos RoboticosDocumento12 páginasClasificacion de Brazos RoboticosRichard Muñoz100% (1)
- Stop The Bleed Manual Español - EMT CapacitaciónDocumento16 páginasStop The Bleed Manual Español - EMT Capacitaciónnahim montes100% (5)
- Cavalli Sforza, Luigi Luca - Genes Pueblos y LenguasDocumento163 páginasCavalli Sforza, Luigi Luca - Genes Pueblos y LenguasTania Randall BallesteAún no hay calificaciones
- TP Derecho Penal I Teoría de Las PenasDocumento13 páginasTP Derecho Penal I Teoría de Las PenasOscar CáceresAún no hay calificaciones
- Crítica Literaria y GéneroDocumento164 páginasCrítica Literaria y GéneroAnaLauraAún no hay calificaciones
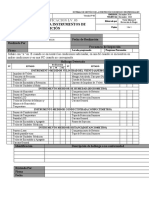
- LV-03 Lista Verificacion Instrumentos de MedicionDocumento1 páginaLV-03 Lista Verificacion Instrumentos de MedicionFabian FloresAún no hay calificaciones
- El Paraguas de WittgensteinDocumento3 páginasEl Paraguas de WittgensteinEl-Egan Lamors100% (1)
- 1trabajo Final SafDocumento295 páginas1trabajo Final SafYesicaOrdóñezAún no hay calificaciones
- Informe Tecnico QuiruvilcaDocumento16 páginasInforme Tecnico QuiruvilcaRichard DavilaAún no hay calificaciones
- La Materia. Leyes Ponderales. El Mol.Documento28 páginasLa Materia. Leyes Ponderales. El Mol.Maria LopezAún no hay calificaciones
- A2-ASIS-guia Servicios ProgramasDocumento74 páginasA2-ASIS-guia Servicios ProgramasJuan Jose Changllio RoasAún no hay calificaciones
- Proyecto Escolar - Feria de CienciaDocumento4 páginasProyecto Escolar - Feria de Cienciafreddy87100% (2)
- Acta de Constitucion y Estatuto - Alex VargasDocumento15 páginasActa de Constitucion y Estatuto - Alex VargasAlexander VargasAún no hay calificaciones
- Autoestudio Del Programa de Ingenieria Civil 2017Documento568 páginasAutoestudio Del Programa de Ingenieria Civil 2017Juan MoralesAún no hay calificaciones
- Lista de Invitados DURBY 01Documento5 páginasLista de Invitados DURBY 01Angel Arturo Oxacopa GarciaAún no hay calificaciones
- FIS Campo Electrico 4Documento11 páginasFIS Campo Electrico 4Sergio Andres Rojo VeraAún no hay calificaciones
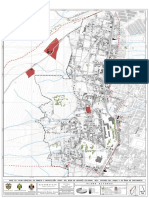
- Plano AlturasDocumento1 páginaPlano AlturasJeyson Duván López Castillo100% (1)
- 10 Anejo7Documento14 páginas10 Anejo7kggrAún no hay calificaciones
- Manual Saber para CrecerDocumento230 páginasManual Saber para Crecertamara elieth aburto bojorgeAún no hay calificaciones
- 2 Aprendizaje VS. Adquisición PDFDocumento17 páginas2 Aprendizaje VS. Adquisición PDFMARIEL DIAZ ESTRADAAún no hay calificaciones
- SomosfitDocumento10 páginasSomosfitFa Denis0% (1)
- GT14. Normas de SeguridadDocumento8 páginasGT14. Normas de Seguridad001jehuty001Aún no hay calificaciones
- Cómo Surgió La MúsicaDocumento4 páginasCómo Surgió La MúsicaAnyela De Leon100% (3)
- Glosario Gaete M.J & Parra, F.Documento18 páginasGlosario Gaete M.J & Parra, F.Florencia ParraAún no hay calificaciones
- Entrevista y Prueba Psicotecnica Sura-Copy (2) - Copy-Copy (1) - Copy-Copy-Copy-Copy-Copy-Copy (7) - Copy-1Documento5 páginasEntrevista y Prueba Psicotecnica Sura-Copy (2) - Copy-Copy (1) - Copy-Copy-Copy-Copy-Copy-Copy (7) - Copy-1Vienna Michelle Álvarez OsorioAún no hay calificaciones