También podría gustarte
- Modulo PWMDocumento6 páginasModulo PWMpedro_aguilar_43Aún no hay calificaciones
- PDF - Flip Flop - ProteusDocumento13 páginasPDF - Flip Flop - ProteusRoberto SalvaDorAún no hay calificaciones
- Problemas - Transistores MosfetDocumento15 páginasProblemas - Transistores Mosfetedwinrr7Aún no hay calificaciones
- P3 Electro I FinalDocumento24 páginasP3 Electro I FinalMiguel Perez100% (1)
- Ex. Final Ee532 - Fiee UniDocumento8 páginasEx. Final Ee532 - Fiee UniDavidAún no hay calificaciones
- 1525190819notas Pub 503 B I 2018Documento108 páginas1525190819notas Pub 503 B I 2018TheAlanMCAún no hay calificaciones
- Modelo IdealDocumento5 páginasModelo IdealMatias SuntaxiAún no hay calificaciones
- GUIA 3 2004 NormalDocumento2 páginasGUIA 3 2004 NormalTextos de IngenieriaAún no hay calificaciones
- Amplificador Diferencial 2 PDFDocumento11 páginasAmplificador Diferencial 2 PDFSofia ZamoraAún no hay calificaciones
- Parcial Jacinto EstadisticaDocumento2 páginasParcial Jacinto EstadisticaDavid Albres PabloAún no hay calificaciones
- 2do Examen Parcial 2do Semestre 2021Documento5 páginas2do Examen Parcial 2do Semestre 2021ANGEL ARIEL VELIZ GODOYAún no hay calificaciones
- Sumador AritmeticoDocumento9 páginasSumador AritmeticoBrian ZM100% (1)
- Práctica 1 Analógica 2Documento8 páginasPráctica 1 Analógica 2Kamila KAún no hay calificaciones
- Examen Resuelto de Instalaciones HidráulicasDocumento7 páginasExamen Resuelto de Instalaciones HidráulicasJuan DavidAún no hay calificaciones
- Laboraotorio 1 de Robotica.Documento24 páginasLaboraotorio 1 de Robotica.Luis Alexander Juarez MercedesAún no hay calificaciones
- Guia 5 Prueba de HipótesisDocumento7 páginasGuia 5 Prueba de HipótesisGerardo ConisllaAún no hay calificaciones
- Guia Practica #2Documento12 páginasGuia Practica #2JOAN BRANCO QUISPE BREÑAAún no hay calificaciones
- Argos16.Cir OtaDocumento12 páginasArgos16.Cir OtaMichael Isael Altamirano CuevaAún no hay calificaciones
- 3 PotenciaDocumento9 páginas3 PotenciaJose Antonio MartinezAún no hay calificaciones
- Método de Detección de CeroDocumento6 páginasMétodo de Detección de CeroTomás AlejandroAún no hay calificaciones
- Informe Final 4 PapitaDocumento8 páginasInforme Final 4 Papitacristhian_sacramentoAún no hay calificaciones
- Practica Circuitos ElectronicosDocumento6 páginasPractica Circuitos ElectronicosAndré Mateo Triveño LuqueAún no hay calificaciones
- Laboratorio 3 - Transistor BJT - 2019-IDocumento8 páginasLaboratorio 3 - Transistor BJT - 2019-IFranklin Apolinario Vilcarana MaquitoAún no hay calificaciones
- PA2 - Victorio Romero - BertoltDocumento4 páginasPA2 - Victorio Romero - BertoltJeremy Chavez CerronAún no hay calificaciones
- Practica de Laboratorio 02-2020Documento6 páginasPractica de Laboratorio 02-2020Juan SotoAún no hay calificaciones
- Tarea Freddy TigreroDocumento11 páginasTarea Freddy TigreroAleXander DiiazAún no hay calificaciones
- Practica 6 Melissa Carpio 2018-3054Documento1 páginaPractica 6 Melissa Carpio 2018-3054MarisAún no hay calificaciones
- Laboratorio 3 FinalDocumento12 páginasLaboratorio 3 FinalCarl William Castañeda Rojas100% (1)
- Metodo de La Razon de La CadenaDocumento4 páginasMetodo de La Razon de La CadenaLisbeth HuayhuaAún no hay calificaciones
- Práctica N5Documento9 páginasPráctica N5Esteban MontesAún no hay calificaciones
- Guia de PracticaDocumento7 páginasGuia de PracticaJhonnyEdgardParionaCamposAún no hay calificaciones
- Prueba Desarrollo Consolidado 1 E-10672Documento2 páginasPrueba Desarrollo Consolidado 1 E-10672Elvis Sanchez AccostupaAún no hay calificaciones
- Lab 02 Diodo SemiconductorDocumento11 páginasLab 02 Diodo SemiconductorleonardoAún no hay calificaciones
- Tema 5Documento18 páginasTema 5Juliana MejíaAún no hay calificaciones
- Carga y Descarga CondensadorDocumento9 páginasCarga y Descarga CondensadorMaria Camila Diaz CastroAún no hay calificaciones
- Evaluacion Parcial Fundamentos RoboticaDocumento2 páginasEvaluacion Parcial Fundamentos RoboticaALBERT JUSTINIANO MEDINAAún no hay calificaciones
- Laboratorio N.4 PDFDocumento3 páginasLaboratorio N.4 PDFJuan R. BautistaAún no hay calificaciones
- S02 - Ejercicios de Calculo de PotenciaDocumento12 páginasS02 - Ejercicios de Calculo de PotenciaLokazo BrihammzAún no hay calificaciones
- Lab #1 - Medición y Teoria de ErroresDocumento4 páginasLab #1 - Medición y Teoria de ErroresEduardo Leon OscanoaAún no hay calificaciones
- Actividad Virtual N°3 - Revisión de IntentosDocumento13 páginasActividad Virtual N°3 - Revisión de IntentosnandezfoxAún no hay calificaciones
- Ejercicios Mallas Thevenin NortonDocumento6 páginasEjercicios Mallas Thevenin NortonJorge Santiago MontielAún no hay calificaciones
- Untitled 1Documento1 páginaUntitled 1casaberoAún no hay calificaciones
- ANALISIS DE CIRCUITOS ELECTRICOS IiDocumento6 páginasANALISIS DE CIRCUITOS ELECTRICOS IiLuis Enrique CTAún no hay calificaciones
- Laboratorio Ce 8Documento7 páginasLaboratorio Ce 8トナカイ メイコルAún no hay calificaciones
- Clase 6 ConversionDocumento35 páginasClase 6 ConversiongustagarotoAún no hay calificaciones
- G.a.3 Aplicaciones en AC Con DiodosDocumento17 páginasG.a.3 Aplicaciones en AC Con DiodosHarry ZaldañaAún no hay calificaciones
- Clase Algebra Lineal-Semana 11-2Documento92 páginasClase Algebra Lineal-Semana 11-2Bruno MeloAún no hay calificaciones
- Solucionario de La 1ra Práctica EE 210 2018 II PDFDocumento7 páginasSolucionario de La 1ra Práctica EE 210 2018 II PDFChristian Huapaya ContrerasAún no hay calificaciones
- ValloracionDocumento3 páginasValloracionDison Uziel Orihuela QuispeAún no hay calificaciones
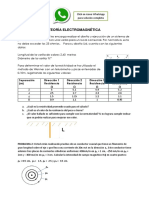
- Teoría ElectromagnéticaDocumento2 páginasTeoría ElectromagnéticaMatemática, letras y más100% (1)
- Guía de Fundamentos de Programacion C++Documento235 páginasGuía de Fundamentos de Programacion C++Raphael MT100% (1)
- Prueba - Desarrollo Parcial TE - 2020-10Documento2 páginasPrueba - Desarrollo Parcial TE - 2020-10dany50% (2)
- ACTUAL Producto Académico 2 Teoria ElectromagneticaDocumento20 páginasACTUAL Producto Académico 2 Teoria ElectromagneticaSERGIO CESAR MAMANI LEONAún no hay calificaciones
- Implementación WilliamDocumento21 páginasImplementación WilliamSoretroath CutAún no hay calificaciones
- Calculos y Graficas Del Ejercicio 2.3Documento7 páginasCalculos y Graficas Del Ejercicio 2.3gabyguilloAún no hay calificaciones
- Control Digital de Velocidad de Un Motor DCDocumento16 páginasControl Digital de Velocidad de Un Motor DCBeatrizMontesAún no hay calificaciones
- Control PWM de Un Motor DC Con Microcontroladores PICDocumento5 páginasControl PWM de Un Motor DC Con Microcontroladores PICJehison EscobarAún no hay calificaciones
- Termostato para Acuario - CódigoDocumento4 páginasTermostato para Acuario - CódigoAntonio Peña FernándezAún no hay calificaciones
- p5 SsanchezDocumento15 páginasp5 SsanchezSebastian Sanchez MacasAún no hay calificaciones
- Motor-PID Con PicsDocumento9 páginasMotor-PID Con PicsFabian Hernandez AguilarAún no hay calificaciones
- Trabajo de InvestigacionDocumento1 páginaTrabajo de InvestigacionPamela Rodriguez RodriguezAún no hay calificaciones
- ModeloDocumento1 páginaModeloPamela Rodriguez RodriguezAún no hay calificaciones
- Libros Clase 1Documento21 páginasLibros Clase 1Pamela Rodriguez RodriguezAún no hay calificaciones
- Sistemas OperativoDocumento11 páginasSistemas OperativoPamela Rodriguez RodriguezAún no hay calificaciones
- Libros Session 1 - InnovacionDocumento18 páginasLibros Session 1 - InnovacionPamela Rodriguez RodriguezAún no hay calificaciones
- PDFDocumento112 páginasPDFYesenia CordovaAún no hay calificaciones
- PalomaDocumento15 páginasPalomaPamela Rodriguez RodriguezAún no hay calificaciones
- Amplificador InversorDocumento7 páginasAmplificador InversorPamela Rodriguez RodriguezAún no hay calificaciones
- CCNA2 Lab 3 2 7 EsDocumento6 páginasCCNA2 Lab 3 2 7 Esangel1136Aún no hay calificaciones
- Programa en Pic Basic ProDocumento2 páginasPrograma en Pic Basic ProPamela Rodriguez RodriguezAún no hay calificaciones
- Caso PracticosDocumento2 páginasCaso PracticosPamela Rodriguez RodriguezAún no hay calificaciones
- Caso PracticosDocumento2 páginasCaso PracticosPamela Rodriguez RodriguezAún no hay calificaciones
- Solucion Caso CurmisaDocumento4 páginasSolucion Caso CurmisaPamela Rodriguez Rodriguez100% (1)
- TDR YanaDocumento3 páginasTDR YanaRoger Montesinos GuillenAún no hay calificaciones
- Formato Solicitud Correccion ConstanciaDocumento2 páginasFormato Solicitud Correccion ConstanciaAdm Rigger Crane SacAún no hay calificaciones
- Expediente Tecnico FinalcorregidoDocumento98 páginasExpediente Tecnico FinalcorregidoFer Ormachea Suyo100% (2)
- Unidad-Didáctica-N 08-Octubre Nov - Primer-GradoDocumento10 páginasUnidad-Didáctica-N 08-Octubre Nov - Primer-GradoEsmeraldaAliciaEchegarayBernaolaAún no hay calificaciones
- Sesion 7-8Documento29 páginasSesion 7-8Byron Pesantez50% (4)
- Laboratorio de Topografia I y IIDocumento13 páginasLaboratorio de Topografia I y IIAide marily Charca CoilaAún no hay calificaciones
- Guia de Estudio Calculo de AreasDocumento13 páginasGuia de Estudio Calculo de Areasbrayan orihuela lozanoAún no hay calificaciones
- Calculadora H PDocumento21 páginasCalculadora H Pinfinito_mas_allaAún no hay calificaciones
- Deformación Por CorteDocumento19 páginasDeformación Por Cortepedro valenciaAún no hay calificaciones
- Pizarron 1-4Documento14 páginasPizarron 1-4Guadalupe AñorveAún no hay calificaciones
- TAREA 4 Ino.2Documento7 páginasTAREA 4 Ino.2Jose Manuel Quispe RiveraAún no hay calificaciones
- Informe CentroDocumento10 páginasInforme CentroCristhian CardenasAún no hay calificaciones
- 38 Preimpresion FotomecanicaDocumento20 páginas38 Preimpresion FotomecanicaLourdes Casado SanchezAún no hay calificaciones
- Alfa Laval SPC 2 Valvula Reguladora Folletos Del ProductoDocumento4 páginasAlfa Laval SPC 2 Valvula Reguladora Folletos Del ProductoJose GalindoAún no hay calificaciones
- Lista CCTV Dahua Sisegusa 2021Documento21 páginasLista CCTV Dahua Sisegusa 2021Pablo AliagaAún no hay calificaciones
- Optimizacion de Procesos en Refinerias (Parte 1) - M - Carugo PDFDocumento75 páginasOptimizacion de Procesos en Refinerias (Parte 1) - M - Carugo PDFYosmar Guzman100% (1)
- Disoluciones QuimicasDocumento19 páginasDisoluciones Quimicaskatiagelvis100% (8)
- Helicobalotario (Bimestral Iii) - 4° - TrigonometríaDocumento15 páginasHelicobalotario (Bimestral Iii) - 4° - TrigonometríaGABRIELLA ALESSANDRA OCHOA SALGADOAún no hay calificaciones
- Equipo Osart y Celdas ElectroquímicasDocumento17 páginasEquipo Osart y Celdas ElectroquímicasJosepepe Bedolla BAún no hay calificaciones
- Concreto EstructuralDocumento38 páginasConcreto EstructuralJohnnyCarbajalGuzman100% (2)
- Microcontrollers FundamentalsDocumento126 páginasMicrocontrollers FundamentalsMarco RosasAún no hay calificaciones
- 9 15 Dic EsfuerzosDocumento25 páginas9 15 Dic EsfuerzosSonlange Shantall CallerAún no hay calificaciones
- Formacion de La OrinaDocumento5 páginasFormacion de La OrinaFernanda OvandoAún no hay calificaciones
- Jaime Segarra El Excitante Camino Al Exito Segunda Edicion GratuitoDocumento7 páginasJaime Segarra El Excitante Camino Al Exito Segunda Edicion Gratuitoerick_abreuvAún no hay calificaciones
- Actividades-Semana 4-1Documento3 páginasActividades-Semana 4-1sulannee alejoAún no hay calificaciones
- Diseños de Investigación en Psicología - (PG 227 - 257)Documento31 páginasDiseños de Investigación en Psicología - (PG 227 - 257)mayerlyAún no hay calificaciones
- Aplicaciones Industriales de La FisicoquímicaDocumento1 páginaAplicaciones Industriales de La FisicoquímicaMarco AurelioAún no hay calificaciones
- Autodesk InfraWorks 2019Documento96 páginasAutodesk InfraWorks 2019mdelvallevAún no hay calificaciones
- WsusDocumento105 páginasWsusraliagacAún no hay calificaciones
- Estudios de Caso 2 - M4 - S14 - Usam - 2020Documento2 páginasEstudios de Caso 2 - M4 - S14 - Usam - 2020Roberto Garita Romero63% (8)
- Diseño de RisersDocumento31 páginasDiseño de Risersjduran_307951Aún no hay calificaciones
- Estadistica DescriptivaDocumento37 páginasEstadistica DescriptivaJuancarlos LozanoAún no hay calificaciones
- PRESENTACION 1 COLOR Hugo Domingo MolinaDocumento11 páginasPRESENTACION 1 COLOR Hugo Domingo Molinahugo molinaAún no hay calificaciones