También podría gustarte
- Fundamentos de Programación LinealDocumento19 páginasFundamentos de Programación LinealDiego SanchezAún no hay calificaciones
- Nuevo MinuDocumento46 páginasNuevo MinuJavier YaucanAún no hay calificaciones
- Capitulo 1 Programación LinealDocumento12 páginasCapitulo 1 Programación LinealErika ColchaAún no hay calificaciones
- IntProgLineal 1Documento100 páginasIntProgLineal 1Fredy V. YactayoAún no hay calificaciones
- IntProgLineal 1Documento100 páginasIntProgLineal 1AldoMoreno0% (1)
- Unidad 3 Programacion LinealDocumento14 páginasUnidad 3 Programacion LinealAlexis BeersAún no hay calificaciones
- Programacion Lineal CompletaDocumento127 páginasProgramacion Lineal CompletaJuan Luis VeusAún no hay calificaciones
- Texto Investigación de OperacionesDocumento7 páginasTexto Investigación de OperacionesDavid CVAún no hay calificaciones
- Introduccion A La Programacion LinealDocumento100 páginasIntroduccion A La Programacion Linealcristina martinezAún no hay calificaciones
- Optimizacion 3Documento21 páginasOptimizacion 3Alex CruzAún no hay calificaciones
- Formulacion de ProblemasDocumento7 páginasFormulacion de ProblemasXRedragonx Geancarlo Apaza ManriqueAún no hay calificaciones
- A Través de Los Lados Del PolígonoDocumento18 páginasA Través de Los Lados Del Polígonocruz cruzAún no hay calificaciones
- Modelo de Programación LinealDocumento9 páginasModelo de Programación LinealUlises Nava CallejasAún no hay calificaciones
- Asignacion 4-Anelys MojicaDocumento7 páginasAsignacion 4-Anelys MojicaAnelys AnaisAún no hay calificaciones
- 3.metodo SimplexDocumento22 páginas3.metodo SimplexMadeley UgarteAún no hay calificaciones
- DualidadDocumento8 páginasDualidadLucasAddurAún no hay calificaciones
- IOP U2aDocumento23 páginasIOP U2apiesAún no hay calificaciones
- 09cap6 ModeloDeTransporteDocumento52 páginas09cap6 ModeloDeTransporteEloy PonceAún no hay calificaciones
- DualidadDocumento8 páginasDualidadMarcelo GutierrezAún no hay calificaciones
- Introducción PL - Método GráficoDocumento38 páginasIntroducción PL - Método GráficoLucas KinasAún no hay calificaciones
- Separata #2 TareaDocumento31 páginasSeparata #2 TareaFrank ToribioAún no hay calificaciones
- Tema 5 Unidad IDocumento28 páginasTema 5 Unidad IXiomara HoyosAún no hay calificaciones
- Tema 3 Unidad IDocumento17 páginasTema 3 Unidad IKamijō TōmaAún no hay calificaciones
- Funcion ObjetivoDocumento35 páginasFuncion ObjetivoRodrigo Ramirez GaldamezAún no hay calificaciones
- Programacion LinealDocumento40 páginasProgramacion LinealMauricio Ramirez100% (1)
- 3-Solart - Caspar15-22-03Documento11 páginas3-Solart - Caspar15-22-03pablou88Aún no hay calificaciones
- MetoDo Simplex - Codigo MatlabDocumento4 páginasMetoDo Simplex - Codigo Matlabjulitri21Aún no hay calificaciones
- Mapa Conceptual 2. NANCY BRENESDocumento5 páginasMapa Conceptual 2. NANCY BRENESNancy BrenesAún no hay calificaciones
- Dualidad LindoDocumento15 páginasDualidad LindorantojrAún no hay calificaciones
- 984 Metodos Cuantitativos en La Empresa PDFDocumento4 páginas984 Metodos Cuantitativos en La Empresa PDFcarAún no hay calificaciones
- Programaci On Por Metas Lexicogr Aficas Con Criterios Fraccionales No LinealesDocumento16 páginasProgramaci On Por Metas Lexicogr Aficas Con Criterios Fraccionales No LinealesMarcelo GutierrezAún no hay calificaciones
- Modelos 1 Programacion No LinealDocumento27 páginasModelos 1 Programacion No LinealVladimir Alejandro LoboAún no hay calificaciones
- Panorama General de La Programación de MetasDocumento7 páginasPanorama General de La Programación de MetasDagoberto MaresAún no hay calificaciones
- Apuntes Unidad 1 METASDocumento42 páginasApuntes Unidad 1 METASDiego50% (2)
- Unidad 3 Investigacion de OperacionesDocumento30 páginasUnidad 3 Investigacion de OperacionesGuillermo GarciaAún no hay calificaciones
- Capitulo 2-Almeida, Macas, QuinatoaDocumento29 páginasCapitulo 2-Almeida, Macas, QuinatoaAxelAún no hay calificaciones
- Jaimes Jesus Do g7 Monagas Asignacion 2Documento14 páginasJaimes Jesus Do g7 Monagas Asignacion 2Jesus JaimesAún no hay calificaciones
- Modelo de Programacion LinealDocumento61 páginasModelo de Programacion LinealSamuel OrtegaAún no hay calificaciones
- 09cap6 ModeloDeTransporteDocumento52 páginas09cap6 ModeloDeTransporteElmer-CamperoAún no hay calificaciones
- El Metodo SimplexDocumento7 páginasEl Metodo SimplexulululalaAún no hay calificaciones
- Pasos y Tecniocas para La Construccion de Modelos MatematicosDocumento38 páginasPasos y Tecniocas para La Construccion de Modelos Matematicoswilliam LibreAún no hay calificaciones
- Trabajo 2 de OperativaDocumento29 páginasTrabajo 2 de Operativagenesis2802Aún no hay calificaciones
- T-DSSP - PL - 17-18 D 1-41Documento21 páginasT-DSSP - PL - 17-18 D 1-41Pablo de LlanosAún no hay calificaciones
- Clase 2Documento81 páginasClase 2zaq598264Aún no hay calificaciones
- Programación LinealDocumento95 páginasProgramación LinealPilar PeffaureAún no hay calificaciones
- Programación Lineal EnteraDocumento10 páginasProgramación Lineal EnteraPaolitha TorresAún no hay calificaciones
- Dualidad y SensibilidadDocumento20 páginasDualidad y SensibilidadFrancisco Ly100% (1)
- Trabajo de Investigacionde OperacionesDocumento17 páginasTrabajo de Investigacionde OperacionesAmerico Sierra MasiasAún no hay calificaciones
- OCWProg EnteraDocumento24 páginasOCWProg EnteraMarlon DavidAún no hay calificaciones
- Ccap 2Documento11 páginasCcap 2Erick LeónAún no hay calificaciones
- Programacion No LinealDocumento50 páginasProgramacion No LinealDayra Blanco LopezAún no hay calificaciones
- Tema 8Documento4 páginasTema 8Godofredo Poccori Umeres100% (1)
- Programación Lineal - U2Documento30 páginasProgramación Lineal - U2Cynthia Nayeli MendozaAún no hay calificaciones
- ModeloDeTransporteDocumento36 páginasModeloDeTransporteSaray Fernández SaavedraAún no hay calificaciones
- Monografia de DualidadDocumento20 páginasMonografia de DualidadLucia Melania Yañez RivasAún no hay calificaciones
- Dualidad Simplex SensibilidadDocumento63 páginasDualidad Simplex SensibilidadJose Luis BañonAún no hay calificaciones
- Programacion No Lineal - 2Documento44 páginasProgramacion No Lineal - 2Luis Castro ApablazaAún no hay calificaciones
- Tema 2 Unidad IDocumento19 páginasTema 2 Unidad IXiomara HoyosAún no hay calificaciones
- Programacion MatemáticaDocumento86 páginasProgramacion MatemáticaJhonny Callo CamposAún no hay calificaciones
- Parcial 2 - Semestre Oct-Feb PDFDocumento8 páginasParcial 2 - Semestre Oct-Feb PDFmkmkmAún no hay calificaciones
- Solución Segunda Evaluación Estadística II 12.12.2015Documento10 páginasSolución Segunda Evaluación Estadística II 12.12.2015mkmkm100% (1)
- 67 Soluci 2525C3 2525B3n 252b2da. 252BEval 252BEstadistica 252BII 252BDiciembre 252B2014Documento6 páginas67 Soluci 2525C3 2525B3n 252b2da. 252BEval 252BEstadistica 252BII 252BDiciembre 252B2014mkmkm100% (1)
- 09 Dos Transformaciones de Dos Variables AleatoriasDocumento5 páginas09 Dos Transformaciones de Dos Variables AleatoriasmkmkmAún no hay calificaciones
- 15 Introduccion Al Analisis de Datos. Estimacion PuntualDocumento11 páginas15 Introduccion Al Analisis de Datos. Estimacion PuntualmkmkmAún no hay calificaciones
- 11 Funcion Generatriz de Momentos ConjuntaDocumento2 páginas11 Funcion Generatriz de Momentos ConjuntamkmkmAún no hay calificaciones
- 10 Estadisticos de Orden BidimensionalesDocumento6 páginas10 Estadisticos de Orden BidimensionalesmkmkmAún no hay calificaciones
- C4 Problemas Sobre Modelos DiscretosDocumento11 páginasC4 Problemas Sobre Modelos DiscretosmkmkmAún no hay calificaciones
- 07 Esperanza CondicionalDocumento5 páginas07 Esperanza CondicionalmkmkmAún no hay calificaciones
- C5 Problemas Sobre Modelos ContinuosDocumento7 páginasC5 Problemas Sobre Modelos ContinuosmkmkmAún no hay calificaciones
- C3 Problemas Sobre Una Variable AleatoriaDocumento9 páginasC3 Problemas Sobre Una Variable AleatoriamkmkmAún no hay calificaciones
- 06 Esperanza AbsolutaDocumento4 páginas06 Esperanza AbsolutamkmkmAún no hay calificaciones
- C2 Problemas Sobre Calculo de ProbabilidadesDocumento11 páginasC2 Problemas Sobre Calculo de ProbabilidadesmkmkmAún no hay calificaciones
- C1 Problemas Sobre Introduccion Al Analisis de DatosDocumento6 páginasC1 Problemas Sobre Introduccion Al Analisis de DatosmkmkmAún no hay calificaciones
- 02 Estadistica y Probabilidades Capítulo 2Documento34 páginas02 Estadistica y Probabilidades Capítulo 2mkmkmAún no hay calificaciones
- 03 Estadistica y Probabilidades Capítulo 3Documento26 páginas03 Estadistica y Probabilidades Capítulo 3mkmkmAún no hay calificaciones
- PL 02 (04-02-20) PDFDocumento47 páginasPL 02 (04-02-20) PDFmkmkmAún no hay calificaciones
- UntitledDocumento8 páginasUntitledCarlos Ramos RosalesAún no hay calificaciones
- EscolarDocumento4 páginasEscolargris sereAún no hay calificaciones
- Perez YrDocumento121 páginasPerez YrANDRES SALAS RODRIGUEZAún no hay calificaciones
- Manual de Usuario ASKIR230Documento7 páginasManual de Usuario ASKIR230ANGIE XIMENA BOLIVAR PRIETOAún no hay calificaciones
- Parcial Primer Corte Plan de NegocioDocumento6 páginasParcial Primer Corte Plan de NegocioMelissa Cantillo CastiblancoAún no hay calificaciones
- Unidad 7 - Violencia Familiar y Violencia Política - SluzkiDocumento28 páginasUnidad 7 - Violencia Familiar y Violencia Política - SluzkiMili EizagaAún no hay calificaciones
- Instalaciones Sanitarias de Baño y CocinaDocumento3 páginasInstalaciones Sanitarias de Baño y CocinaPierre Oliveira SalazarAún no hay calificaciones
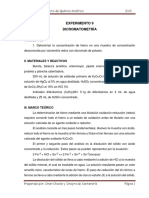
- Experimento 9 Dicromatometría: I. ObjetivosDocumento7 páginasExperimento 9 Dicromatometría: I. ObjetivosAron Amet BatistaAún no hay calificaciones
- Traductor RPDocumento16 páginasTraductor RPyeseAún no hay calificaciones
- InformeDocumento4 páginasInformeJonathan MoreiraAún no hay calificaciones
- A3. Reporte de InvestigaciónDocumento23 páginasA3. Reporte de InvestigaciónManuel Mayorga (RadioPrimitivo)Aún no hay calificaciones
- Renunciar Al Bien Común Extractivismo y Posdesarrollo en ALDocumento6 páginasRenunciar Al Bien Común Extractivismo y Posdesarrollo en ALMeyby Soraya Ugueto-PonceAún no hay calificaciones
- Ficha de Trabajo de La I Guerra MundialDocumento4 páginasFicha de Trabajo de La I Guerra MundialSaid Sotelo PandalAún no hay calificaciones
- Apus 2015Documento261 páginasApus 2015Julio Ramos100% (1)
- Unidad 2 - Funciones Funcion LinealDocumento53 páginasUnidad 2 - Funciones Funcion LinealRenzo BastianiAún no hay calificaciones
- Tríptico T.D.A Grupo 1 2020 PDFDocumento2 páginasTríptico T.D.A Grupo 1 2020 PDFthaisAún no hay calificaciones
- Tarifa Omron 22Documento186 páginasTarifa Omron 22Antonio Diaz ToreroAún no hay calificaciones
- Características Histológicas Del ATM y de Las Otras ArticulacionesDocumento1 páginaCaracterísticas Histológicas Del ATM y de Las Otras ArticulacionesJuan Camilo Bernal GiraldoAún no hay calificaciones
- Educacion Emocional 01Documento2 páginasEducacion Emocional 01Ludmila OrtegaAún no hay calificaciones
- Sistema Reproductor MasculinoDocumento7 páginasSistema Reproductor MasculinoEduardo RomeroAún no hay calificaciones
- Ejer Cici OsDocumento3 páginasEjer Cici OsLiszy Magu100% (3)
- FT0604 BlanqueadorDocumento3 páginasFT0604 BlanqueadorIcone Ingeniería ColombianaAún no hay calificaciones
- ArchéDocumento2 páginasArchéIVAN REYESAún no hay calificaciones
- Trabajo N°2 Planeamiento Urbano (Monografico)Documento66 páginasTrabajo N°2 Planeamiento Urbano (Monografico)noraAún no hay calificaciones
- Programa de AuditoríaDocumento4 páginasPrograma de AuditoríaZuleyma Malerva Del ÁngelAún no hay calificaciones
- Costo de Cultivo de Uva Año 2020Documento8 páginasCosto de Cultivo de Uva Año 2020Andres Felipe Losada EstradaAún no hay calificaciones
- Doña PerfectaDocumento10 páginasDoña PerfectaTamara Cepeda CáceresAún no hay calificaciones
- EjercicioGuiado03 JavaDocumento6 páginasEjercicioGuiado03 JavaWilmar BedoyaAún no hay calificaciones
- Programa de Gestion Documental 2020Documento60 páginasPrograma de Gestion Documental 2020Brenda BastidasAún no hay calificaciones
- Cuadro Sinóptico ComplejoDocumento2 páginasCuadro Sinóptico ComplejoNicol SctAún no hay calificaciones