También podría gustarte
- Informe 2Documento7 páginasInforme 2DanielOlmedoNavarreteAún no hay calificaciones
- PACHECO AutomatizacionDocumento112 páginasPACHECO Automatizacionselvita_martinAún no hay calificaciones
- Laboratorio 2 E2Documento3 páginasLaboratorio 2 E2DanielOlmedoNavarreteAún no hay calificaciones
- Laboratorio 3Documento2 páginasLaboratorio 3DanielOlmedoNavarreteAún no hay calificaciones
- Expe FaradayDocumento4 páginasExpe FaradayDanielOlmedoNavarreteAún no hay calificaciones
- Circular Opciones de Grado ECBTIDocumento9 páginasCircular Opciones de Grado ECBTIMayerli Tatiana Correa ArdilaAún no hay calificaciones
- La PilaDocumento10 páginasLa PilaDanielOlmedoNavarreteAún no hay calificaciones
- Universidad Del QuindíoDocumento5 páginasUniversidad Del QuindíoDanielOlmedoNavarreteAún no hay calificaciones
- Forma de Operación de Los DabbawalasDocumento1 páginaForma de Operación de Los DabbawalasDanielOlmedoNavarreteAún no hay calificaciones
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Cuadro SociedadesDocumento3 páginasCuadro SociedadesDanielOlmedoNavarreteAún no hay calificaciones
- Enfoque de Las Practicas de RSE en La Gestión HumanaDocumento32 páginasEnfoque de Las Practicas de RSE en La Gestión HumanaDanielOlmedoNavarreteAún no hay calificaciones
- Unidad 1 FaseDocumento9 páginasUnidad 1 FaseDanielOlmedoNavarreteAún no hay calificaciones
- Ensayo LibroDocumento1 páginaEnsayo LibroDanielOlmedoNavarreteAún no hay calificaciones
- Sistema Masa - ResortDocumento1 páginaSistema Masa - ResortDanielOlmedoNavarreteAún no hay calificaciones
- Etapa 4Documento5 páginasEtapa 4DanielOlmedoNavarreteAún no hay calificaciones
- Fase 1 - ReconocimientoDocumento4 páginasFase 1 - ReconocimientoDanielOlmedoNavarreteAún no hay calificaciones
- Tarea1 EderOlmedoDocumento22 páginasTarea1 EderOlmedoRafaelCastañedaDuqueAún no hay calificaciones
- UNIDAD 1 Algebra LinealDocumento12 páginasUNIDAD 1 Algebra LinealJeferson CastañedaAún no hay calificaciones
- Sistema Masa - ResortmDocumento2 páginasSistema Masa - ResortmDanielOlmedoNavarreteAún no hay calificaciones
- Unidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDocumento9 páginasUnidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDanielOlmedoNavarreteAún no hay calificaciones
- Unidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDocumento11 páginasUnidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDanielOlmedoNavarreteAún no hay calificaciones
- Unidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDocumento11 páginasUnidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDanielOlmedoNavarreteAún no hay calificaciones
- Unidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDocumento9 páginasUnidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDanielOlmedoNavarreteAún no hay calificaciones
- Info Planta LDocumento3 páginasInfo Planta LDanielOlmedoNavarreteAún no hay calificaciones
- WWDDDocumento7 páginasWWDDDanielOlmedoNavarreteAún no hay calificaciones
- Unidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDocumento12 páginasUnidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDanielOlmedoNavarreteAún no hay calificaciones
- Unidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDocumento11 páginasUnidad 1 Y 2: Etapa 4 - Definir El Modelo Matematico Del Problema PlanteadoDanielOlmedoNavarreteAún no hay calificaciones
- Info Planta LDocumento5 páginasInfo Planta LDanielOlmedoNavarreteAún no hay calificaciones
- Info Planta LDocumento4 páginasInfo Planta LDanielOlmedoNavarreteAún no hay calificaciones
- Bd-01 Bases de DiseñoDocumento10 páginasBd-01 Bases de DiseñoRamos JavierAún no hay calificaciones
- Proyecto Complejo Petroquimico de FertilizantesDocumento11 páginasProyecto Complejo Petroquimico de Fertilizantesbaneador500Aún no hay calificaciones
- Exposicion Al RES ABR21 02ABR21Documento62 páginasExposicion Al RES ABR21 02ABR21JHON KENNYAún no hay calificaciones
- Porcelanato Hatteras Gris Ficha TecnicaDocumento2 páginasPorcelanato Hatteras Gris Ficha TecnicaDANIEL T QUINTEROAún no hay calificaciones
- NTC2575Documento11 páginasNTC2575yeison ochoaAún no hay calificaciones
- Actividad No 1 Apoyo Tematicas PDFDocumento6 páginasActividad No 1 Apoyo Tematicas PDFLuis VasquezAún no hay calificaciones
- Plan de Contingencia Colegio AméricaDocumento10 páginasPlan de Contingencia Colegio AméricawilderAún no hay calificaciones
- Guía de Usuario GympassDocumento8 páginasGuía de Usuario GympassEnzo Di GraziaAún no hay calificaciones
- Intro A Simulink PDFDocumento23 páginasIntro A Simulink PDFNelson Ubaldo Quispe MAún no hay calificaciones
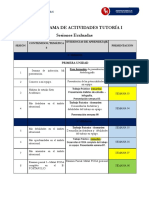
- Cronograma de Actividades Tutoría IDocumento2 páginasCronograma de Actividades Tutoría IYennifer Venicia Peralta PalaciosAún no hay calificaciones
- La Importancia de Las NIIF en El Proceso de Toma de Decisiones GerencialesDocumento3 páginasLa Importancia de Las NIIF en El Proceso de Toma de Decisiones GerencialesManuel MorenoAún no hay calificaciones
- Pil AndinaDocumento5 páginasPil AndinaDaryl Lazaro LauraAún no hay calificaciones
- Politica de SSO TrevaliDocumento14 páginasPolitica de SSO TrevalijorgeAún no hay calificaciones
- Matematicas Financieras Abel Maria Cano MoralesDocumento347 páginasMatematicas Financieras Abel Maria Cano MoralesRoxana MurilloAún no hay calificaciones
- Pei 2020 2024Documento180 páginasPei 2020 2024ANTONY WASHINGTON CONDORI QUISPEAún no hay calificaciones
- Globalizacion 5to AñoDocumento4 páginasGlobalizacion 5to AñogeodaianagomezAún no hay calificaciones
- Resumen Escuelas EconómicasDocumento16 páginasResumen Escuelas EconómicasPatricia Barba100% (1)
- Ley de La Juventud y ReglamentoDocumento40 páginasLey de La Juventud y ReglamentoMaribel RamosAún no hay calificaciones
- Ee FFDocumento17 páginasEe FFMaricela Laureano RaquiAún no hay calificaciones
- Polimeros Felicitas ExposicionDocumento53 páginasPolimeros Felicitas Exposicionfelicitas100% (2)
- L30076603 01U Final 20230223203528Documento1 páginaL30076603 01U Final 20230223203528Nalleli Garcia BernalAún no hay calificaciones
- Compresor Centrífugo de Aire Centac C400 PDFDocumento3 páginasCompresor Centrífugo de Aire Centac C400 PDFJuan Hernández GilAún no hay calificaciones
- Criterios SNP PDFDocumento15 páginasCriterios SNP PDFJuan Carlos García ChávezAún no hay calificaciones
- Eco SoapDocumento3 páginasEco SoapFrida Gtz'Aún no hay calificaciones
- Animacion de Punto de VentaDocumento9 páginasAnimacion de Punto de VentaAngie MedalitAún no hay calificaciones
- Planilla Liquidación Cuota Alimentaria AtrasadaDocumento26 páginasPlanilla Liquidación Cuota Alimentaria AtrasadaVir Ginia ΨAún no hay calificaciones
- FT XL 497Documento2 páginasFT XL 497CENTRONET SSTAún no hay calificaciones
- Textos Jurídicos InglésDocumento13 páginasTextos Jurídicos InglésEsteban Arango CasasAún no hay calificaciones
- Trabajo Unidad 2 Analisis de Decisiones Teoria de Juegos SSS 2020 PDFDocumento2 páginasTrabajo Unidad 2 Analisis de Decisiones Teoria de Juegos SSS 2020 PDFEder Benitez ContrerasAún no hay calificaciones
- P 12-8 Relés de Control Serie Relayne PDFDocumento1 páginaP 12-8 Relés de Control Serie Relayne PDFjose goncalvesAún no hay calificaciones