También podría gustarte
- InfografiaDocumento4 páginasInfografiaSusy Baluxgnz100% (1)
- Desarrollo Sustentable Semana 1 P Bloque DDocumento6 páginasDesarrollo Sustentable Semana 1 P Bloque DSalma RomeroAún no hay calificaciones
- Identidaddes TrigonométricasDocumento9 páginasIdentidaddes TrigonométricasCarlos David Laura QuispeAún no hay calificaciones
- Formulario de TrigonometriaDocumento4 páginasFormulario de Trigonometriatavito_12Aún no hay calificaciones
- Formulario Escuela NavalDocumento4 páginasFormulario Escuela NavalJhon Julio Maravi CeronAún no hay calificaciones
- Formulario2 111006101247 Phpapp01Documento4 páginasFormulario2 111006101247 Phpapp01Luisabel GarciaAún no hay calificaciones
- Trigo No Me TriaDocumento3 páginasTrigo No Me TriaquiriamAún no hay calificaciones
- Demostracion de IdentidadesDocumento7 páginasDemostracion de IdentidadesAlvin DiazAún no hay calificaciones
- Identidades TrigonometricasDocumento14 páginasIdentidades TrigonometricasJohanna BernalAún no hay calificaciones
- TrigonometraDocumento15 páginasTrigonometrasergio zaragoza armentaAún no hay calificaciones
- Identidades TrigonométricasDocumento2 páginasIdentidades Trigonométricasjoselu0510Aún no hay calificaciones
- Repaso Décimo Quiz...Documento8 páginasRepaso Décimo Quiz...NiCoMaJoHoyosSuarezAún no hay calificaciones
- Identidades TrigonometricasDocumento31 páginasIdentidades TrigonometricasJulian BenitezAún no hay calificaciones
- Ángulo DobleDocumento9 páginasÁngulo Dobletavito_12Aún no hay calificaciones
- Guia1IdentidadesTrigonométricas 31jul2012Documento2 páginasGuia1IdentidadesTrigonométricas 31jul2012Cristhian Camilo Celeita HernándezAún no hay calificaciones
- 14 Identidades Trigonométricas FundamentalesDocumento7 páginas14 Identidades Trigonométricas FundamentalesJuan TobónAún no hay calificaciones
- T - S10 - Identidades de Ángulos MultiplesDocumento7 páginasT - S10 - Identidades de Ángulos MultiplesRicardoAún no hay calificaciones
- Ecuaciones e Inecuaciones TrigonométricasDocumento11 páginasEcuaciones e Inecuaciones Trigonométricastavito_12100% (3)
- Taller TrigoDocumento4 páginasTaller TrigoGerman Isaac Sosa MontenegroAún no hay calificaciones
- Trigonometria 3° - Iii TrimDocumento92 páginasTrigonometria 3° - Iii TrimJorge Felix Rodriguez EulogioAún no hay calificaciones
- TRIGONOMETRIADocumento4 páginasTRIGONOMETRIAchristiancj34Aún no hay calificaciones
- Identidades Trigonometricas para El Angulo DobleDocumento9 páginasIdentidades Trigonometricas para El Angulo DobleRicardo BárcenaAún no hay calificaciones
- Semana 007raiDocumento4 páginasSemana 007raiJuan Aiquipa100% (1)
- P10Documento2 páginasP10Matías ApablazaAún no hay calificaciones
- Cap2 ResueltosDocumento14 páginasCap2 ResueltosOscar Salvador Soto ArenasAún no hay calificaciones
- Integración de Potencias TrigonométricasDocumento4 páginasIntegración de Potencias TrigonométricasJaime Ramirez100% (1)
- T S8 Identidades TrigonométricasDocumento7 páginasT S8 Identidades TrigonométricasRicardoAún no hay calificaciones
- 8 - Identidades Trigonométricas para Un Mismo ArcoDocumento10 páginas8 - Identidades Trigonométricas para Un Mismo ArcoPeter BAún no hay calificaciones
- Identidades Trigonométricas FundamentalesDocumento10 páginasIdentidades Trigonométricas Fundamentales5amv3l67% (3)
- Ecuaciones y Sistemas Trigonometricos PDFDocumento0 páginasEcuaciones y Sistemas Trigonometricos PDFAmanda BenitezAún no hay calificaciones
- Tema 1 - 2 Trigonometría EcuacionesDocumento2 páginasTema 1 - 2 Trigonometría EcuacionesJuan Ignacio Gamarra EscamillaAún no hay calificaciones
- Identidad TrigonometricaDocumento6 páginasIdentidad TrigonometricaFelipeScribeAún no hay calificaciones
- Guia 3 (Angulo Doble)Documento3 páginasGuia 3 (Angulo Doble)Carlos SupoAún no hay calificaciones
- Solucionario Asignación de Identidades TrigonométricasDocumento12 páginasSolucionario Asignación de Identidades TrigonométricasCarlos Supo75% (8)
- Limites TrigonometricosDocumento4 páginasLimites TrigonometricosMinerva Bueno88% (8)
- Identidades Trigonometricas FundamentalesDocumento3 páginasIdentidades Trigonometricas FundamentalesAntonio ApacAún no hay calificaciones
- Semana 12Documento6 páginasSemana 12RODOLFO ANGEL CARRILLO VELASQUEZAún no hay calificaciones
- TrigonometriaDocumento93 páginasTrigonometriaWALSEN HELIAN100% (1)
- Guia 4 TrigonometriaDocumento4 páginasGuia 4 TrigonometriamacarenaAún no hay calificaciones
- Trigonometria - A7Documento11 páginasTrigonometria - A7Augusto Sánchez CardozoAún no hay calificaciones
- Guia 1 (Identidades Trigonometric As II)Documento4 páginasGuia 1 (Identidades Trigonometric As II)carlossupo0% (1)
- Guias 3er AÑODocumento63 páginasGuias 3er AÑORichard Ccama Pari0% (1)
- Ejercicios 14 TrigonomDocumento2 páginasEjercicios 14 TrigonomMarcelo GutierrezAún no hay calificaciones
- Secante, Cossecante e CotangenteDocumento5 páginasSecante, Cossecante e CotangenteMarcos Vinicius Oliveira RezendeAún no hay calificaciones
- Junio-Clase-Trigo-2do AñoDocumento8 páginasJunio-Clase-Trigo-2do AñoPedro José Farroñay DíazAún no hay calificaciones
- 2.3.3 TrigonometricasDocumento10 páginas2.3.3 TrigonometricasFercho Castillo ZamudioAún no hay calificaciones
- Tabela de CálculoDocumento2 páginasTabela de CálculoThais DutraAún no hay calificaciones
- Semana 8 PDFDocumento7 páginasSemana 8 PDFRodolfo Angel Carrillo Velasquez0% (1)
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Detección de colisiones: Comprensión de las intersecciones visuales en visión por computadoraDe EverandDetección de colisiones: Comprensión de las intersecciones visuales en visión por computadoraAún no hay calificaciones
- Solution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricDe EverandSolution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricAún no hay calificaciones
- El algoritmo de sintonización simple de controladores difusos: (ASSCD)De EverandEl algoritmo de sintonización simple de controladores difusos: (ASSCD)Aún no hay calificaciones
- Refrigeracion de PapayaDocumento18 páginasRefrigeracion de PapayaRosario Cruz PerezAún no hay calificaciones
- Informe 02 Obtencion Del Cafe en Tasa y Su Evaluacion SensorialDocumento13 páginasInforme 02 Obtencion Del Cafe en Tasa y Su Evaluacion SensorialCesar MendozaAún no hay calificaciones
- Silabo - Diseño Plantas 2Documento4 páginasSilabo - Diseño Plantas 2Anonymous fFYuM5Aún no hay calificaciones
- Evaporadores de Simple EfectoDocumento21 páginasEvaporadores de Simple EfectoCesar Mendoza0% (1)
- MAQUINARIADocumento44 páginasMAQUINARIACesar MendozaAún no hay calificaciones
- EncurtidosDocumento10 páginasEncurtidosCesar MendozaAún no hay calificaciones
- Agro SalsaDocumento19 páginasAgro SalsaCesar MendozaAún no hay calificaciones
- Plan Haccp CecinaDocumento8 páginasPlan Haccp CecinaCesar MendozaAún no hay calificaciones
- Practica de Madera 02 Madera AserradaDocumento4 páginasPractica de Madera 02 Madera AserradaCesar MendozaAún no hay calificaciones
- Cap II Tec. Agroalimentaria I 2015Documento72 páginasCap II Tec. Agroalimentaria I 2015Cesar MendozaAún no hay calificaciones
- Plan Haccp CecinaDocumento8 páginasPlan Haccp CecinaCesar MendozaAún no hay calificaciones
- Facultad de NegociosDocumento151 páginasFacultad de NegociosCesar MendozaAún no hay calificaciones
- Empirista-Inductivo - Grup 2Documento14 páginasEmpirista-Inductivo - Grup 2Cesar MendozaAún no hay calificaciones
- Trabajo 01Documento14 páginasTrabajo 01Cesar MendozaAún no hay calificaciones
- Guia VectoresDocumento11 páginasGuia VectoresDaniela Almarales castroAún no hay calificaciones
- Parcial - Escenario 4 - DIVERSIDAD E INCLUSIÓN - (GRUPO B01)Documento8 páginasParcial - Escenario 4 - DIVERSIDAD E INCLUSIÓN - (GRUPO B01)erika espinosaAún no hay calificaciones
- Asignacion y Ejecucion Siaf 2021 Dos de MayoDocumento6 páginasAsignacion y Ejecucion Siaf 2021 Dos de Mayojuan reyes lazoAún no hay calificaciones
- Plan de AcciónDocumento20 páginasPlan de AcciónJUAN DAVID SERNA VALDERRAMA100% (1)
- Sistema de TuberíasDocumento18 páginasSistema de TuberíasVíctor Sandovsky100% (1)
- LeafBox Memoria TecnicaDocumento4 páginasLeafBox Memoria TecnicaeduardosallucalaricoAún no hay calificaciones
- Tabla Carbono NitrogenoDocumento22 páginasTabla Carbono NitrogenoVladimir Rico ArizaAún no hay calificaciones
- Capítulo 1 Origen e Historia Del ConceptoDocumento96 páginasCapítulo 1 Origen e Historia Del ConceptoBlackZeus VerbonfireAún no hay calificaciones
- HSBC 1023Documento4 páginasHSBC 1023Néstor LorenzoAún no hay calificaciones
- ManualDocumento124 páginasManualAura CortésAún no hay calificaciones
- NTP Centro de DatosDocumento3 páginasNTP Centro de Datosq7jrdhh6dgAún no hay calificaciones
- ArtesDocumento2 páginasArtesJose HierroAún no hay calificaciones
- Oraciones PasivasDocumento3 páginasOraciones PasivasYuliana Rivera MunguiaAún no hay calificaciones
- La Técnica de Las Ocho Dimensiones de Calidad de FordDocumento3 páginasLa Técnica de Las Ocho Dimensiones de Calidad de FordDavidMonroy0% (3)
- Losovsky - Escritos SindicalesDocumento106 páginasLosovsky - Escritos SindicalesMaelocgzAún no hay calificaciones
- Calculo Diferecial Aporte 2Documento16 páginasCalculo Diferecial Aporte 2Mª Zulma AlarconAún no hay calificaciones
- Conductores Eléctricos RDocumento27 páginasConductores Eléctricos Rserviciostecnicos joventAún no hay calificaciones
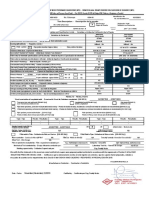
- Wpq-6g Dominguez Hilares, Guide Nico Dni 41322192Documento1 páginaWpq-6g Dominguez Hilares, Guide Nico Dni 41322192Deyvi ChambillaAún no hay calificaciones
- ?6to Grado - Examen Mensual Septiembre (2021-2022)Documento10 páginas?6to Grado - Examen Mensual Septiembre (2021-2022)ley100% (1)
- MecanorrecepciónDocumento14 páginasMecanorrecepciónFernando AkatsukiAún no hay calificaciones
- La Administración Por ValoresDocumento4 páginasLa Administración Por ValoresRudy CoyAún no hay calificaciones
- Normas APA 2018 - 6ta EdiciónDocumento18 páginasNormas APA 2018 - 6ta EdiciónRaulxzito PerezAún no hay calificaciones
- Empirismo en La Educacion PeruanaDocumento4 páginasEmpirismo en La Educacion PeruanaArlet Zeballos DíazAún no hay calificaciones
- Examen DiagnosticoDocumento4 páginasExamen DiagnosticoJose Ricardo Guerra ViloriaAún no hay calificaciones
- TEST de Aprendizaje Keidy MuñozDocumento18 páginasTEST de Aprendizaje Keidy Muñozkeidy MuñozAún no hay calificaciones
- Aprendo Sin Parar BatmanDocumento8 páginasAprendo Sin Parar BatmanMarcelaAún no hay calificaciones
- Hueso Cigomatico MalarDocumento21 páginasHueso Cigomatico MalarMIGUEL ENRIQUE ANTELIZ GAL�NAún no hay calificaciones
- Alcance Coordinacion TecnicaDocumento6 páginasAlcance Coordinacion TecnicaFernando BaezaAún no hay calificaciones