También podría gustarte
- Acordes Guitarra y RequintoDocumento8 páginasAcordes Guitarra y RequintoRISE60182% (11)
- Lección 25 - Verbo Modal Can + WH QuestionsDocumento4 páginasLección 25 - Verbo Modal Can + WH QuestionsHanne J. Bayeh Villarreal100% (1)
- Sing Libreto en Español Hasta Pagina 21Documento44 páginasSing Libreto en Español Hasta Pagina 21Caro Elpuerto100% (1)
- Los 4 Grandes de La Musica ArabeDocumento11 páginasLos 4 Grandes de La Musica ArabeEmily GuevaraAún no hay calificaciones
- Geomática - Laboratorio N°2Documento24 páginasGeomática - Laboratorio N°2pedro jose CLEMENTE LOPEZAún no hay calificaciones
- Evaluación 2 REDES DE COMPUTADORES PARTE 1Documento5 páginasEvaluación 2 REDES DE COMPUTADORES PARTE 1carlos augusto padilla gonzalezAún no hay calificaciones
- Goldman Libro PostaDocumento84 páginasGoldman Libro Postamanuel hazanAún no hay calificaciones
- 3ºESO - Homework 5Documento1 página3ºESO - Homework 5Anonymous 3HnQzg1Aún no hay calificaciones
- Presaber Fase 1 TelemetriaDocumento8 páginasPresaber Fase 1 Telemetrialuz marina villarragaAún no hay calificaciones
- Tèrminos Selectividad FQ 48 79Documento32 páginasTèrminos Selectividad FQ 48 79omarAún no hay calificaciones
- Regulaciones Servicios de Telematica e InformaticaDocumento236 páginasRegulaciones Servicios de Telematica e InformaticanAún no hay calificaciones
- DANZAS FOLKLORICAS DE ARGENTINA CamilaramirezDocumento4 páginasDANZAS FOLKLORICAS DE ARGENTINA CamilaramirezCamila RamirezAún no hay calificaciones
- LUCHO MACEDO - RevistaDocumento48 páginasLUCHO MACEDO - RevistaJavier Alejandro Soto LujanAún no hay calificaciones
- SRC Act 10 EjerciciosDocumento5 páginasSRC Act 10 EjerciciosOsmel Gómez AcostaAún no hay calificaciones
- Danza - Región CaribeDocumento3 páginasDanza - Región CaribeGabriela MachadoAún no hay calificaciones
- Con Las Ganas Zahara Letra y Acordes PDFDocumento2 páginasCon Las Ganas Zahara Letra y Acordes PDFOriana PonceAún no hay calificaciones
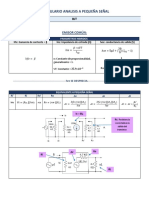
- Formulario Analisis A Pequeña SeñalDocumento5 páginasFormulario Analisis A Pequeña SeñalJaime Bojorquez RomeroAún no hay calificaciones
- Imagine Dragons - BelieverDocumento3 páginasImagine Dragons - BelieverGreivanAún no hay calificaciones
- Corazón PartíoDocumento5 páginasCorazón PartíoAndreia SantosAún no hay calificaciones
- Pop LatinoDocumento1 páginaPop LatinoIsaSantosLópezAún no hay calificaciones
- Himno de San CristobalDocumento2 páginasHimno de San Cristobalyhonrosales1983100% (1)
- Avh 165DVDDocumento2 páginasAvh 165DVDPanchoVillasana0% (1)
- El Afiche PublicitarioDocumento31 páginasEl Afiche PublicitariorosimartiAún no hay calificaciones
- LUNESDocumento2 páginasLUNESKaren Susana Verde JaraAún no hay calificaciones
- Wolfgang Amadeus MozartDocumento3 páginasWolfgang Amadeus Mozartjuan rodriguezAún no hay calificaciones
- Como Se Conforma El Ensamble MusicalDocumento2 páginasComo Se Conforma El Ensamble MusicalAngel Manuel Velasquez CordovaAún no hay calificaciones
- Goin' Home - Partitura CompletaDocumento4 páginasGoin' Home - Partitura CompletaAlejandro Molina CarrascoAún no hay calificaciones
- Tehprahica: RomeaDocumento52 páginasTehprahica: RomeaMarta Barbé MartínezAún no hay calificaciones
- Blazquez 2012 Hacer Belleza Genero Raza y Clase en La Noche de Ciudad de CbaDocumento31 páginasBlazquez 2012 Hacer Belleza Genero Raza y Clase en La Noche de Ciudad de CbaMaria Jose Solis FiegAún no hay calificaciones
- Shawn MendesDocumento3 páginasShawn MendesVania Jazereth Picazo FloresAún no hay calificaciones