También podría gustarte
- LAB4Documento12 páginasLAB4Arturo LobatónAún no hay calificaciones
- 1 Examen LCEDocumento3 páginas1 Examen LCEArturo LobatónAún no hay calificaciones
- Caso Practico 2Documento2 páginasCaso Practico 2Arturo Lobatón0% (1)
- APLICACIÓN DE TRIACs Y TIRISTORESDocumento2 páginasAPLICACIÓN DE TRIACs Y TIRISTORESArturo LobatónAún no hay calificaciones
- Nomenclatura TiristoresDocumento4 páginasNomenclatura TiristoresArturo Lobatón100% (1)
- 1 Sistemas DigitalesDocumento9 páginas1 Sistemas DigitalesArturo LobatónAún no hay calificaciones
- Sistemas Digitales Lab 5Documento19 páginasSistemas Digitales Lab 5Arturo LobatónAún no hay calificaciones
- Transistor en Control On OffDocumento14 páginasTransistor en Control On OffArturo LobatónAún no hay calificaciones
- Resistencia ShuntDocumento3 páginasResistencia ShuntArturo LobatónAún no hay calificaciones
- Indice de Rugosidad Internacional (Iri)Documento3 páginasIndice de Rugosidad Internacional (Iri)enmanuel tisnado uminaAún no hay calificaciones
- Física Básica de Los Métodos Diagnósticos Por ImagenDocumento11 páginasFísica Básica de Los Métodos Diagnósticos Por ImagenDanielaAún no hay calificaciones
- Estimulacion Matricial Reactiva.Documento8 páginasEstimulacion Matricial Reactiva.yency pirelaAún no hay calificaciones
- La DerivadaDocumento15 páginasLa DerivadaJuan AguilarAún no hay calificaciones
- Práctica FARO II Semestre 2022-PrimariafDocumento32 páginasPráctica FARO II Semestre 2022-PrimariafJennifer LaraAún no hay calificaciones
- Ejercicios FuncionesDocumento2 páginasEjercicios FuncionesLiliana AmpAún no hay calificaciones
- Geometria Segementos y AngulosDocumento6 páginasGeometria Segementos y AngulosGERSSON DANIEL SANCHEZ MEJIAAún no hay calificaciones
- Hoja de VidaDocumento4 páginasHoja de VidaeutozrnaAún no hay calificaciones
- LOU EvaporaciónDocumento15 páginasLOU Evaporaciónve_asAún no hay calificaciones
- Ejercicios de CuerposDocumento11 páginasEjercicios de CuerposJean Castro AlamaAún no hay calificaciones
- 6CV8 - Ozuna Fregoso Israel Arturo - Tarea 1 - Acustica y SonidoDocumento26 páginas6CV8 - Ozuna Fregoso Israel Arturo - Tarea 1 - Acustica y SonidoRusyuna HatsAún no hay calificaciones
- Ralston Bombas ManualesDocumento6 páginasRalston Bombas ManualesSalvador LopezAún no hay calificaciones
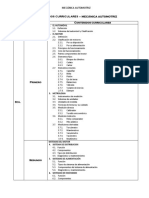
- Contenidos Curriculares Mecanica AutomotrizDocumento3 páginasContenidos Curriculares Mecanica Automotrizmarcos100% (1)
- U3 Ejercicio Autoestudio FQDocumento3 páginasU3 Ejercicio Autoestudio FQJose CuevaAún no hay calificaciones
- Determinación de La Incertidumbre de La Medición en Mediciones de Viscosidad (Ejemplo)Documento6 páginasDeterminación de La Incertidumbre de La Medición en Mediciones de Viscosidad (Ejemplo)francisco monsivaisAún no hay calificaciones
- Rendimiento y Regulacion de Auto TransformadorDocumento5 páginasRendimiento y Regulacion de Auto TransformadorHenrry ValderramaAún no hay calificaciones
- Turbina Hidrocinética para Poblaciones AisladasDocumento3 páginasTurbina Hidrocinética para Poblaciones AisladasSebastián RibadeneiraAún no hay calificaciones
- Practica #1 de Física General Valor 10 PuntosDocumento10 páginasPractica #1 de Física General Valor 10 PuntosJoris AcostaAún no hay calificaciones
- Fis Exp ELT 11 GATDocumento4 páginasFis Exp ELT 11 GATJessel JTAún no hay calificaciones
- Practica 7 PR Actica 7. Control de Velocidad de Un Motor El Ectrico de DCDocumento2 páginasPractica 7 PR Actica 7. Control de Velocidad de Un Motor El Ectrico de DCAlan TapiaAún no hay calificaciones
- Asme VDocumento168 páginasAsme VRicardo ZambranaAún no hay calificaciones
- Evaluacion Del Niño PreescolarDocumento18 páginasEvaluacion Del Niño PreescolarNubia SalasAún no hay calificaciones
- Practica 1 Lab de Bromatologia 2015Documento3 páginasPractica 1 Lab de Bromatologia 2015Shadaí RodríguezAún no hay calificaciones
- Ficha de Seguridad Multiusos Blue MediumDocumento4 páginasFicha de Seguridad Multiusos Blue MediumSebastian Jaramillo RestrepoAún no hay calificaciones
- Ensayo 1 MampuestosDocumento27 páginasEnsayo 1 MampuestosLucy Urrea100% (1)
- Relacion Toxica Como CatalogarlasDocumento4 páginasRelacion Toxica Como Catalogarlasclaudia elenaAún no hay calificaciones
- DEC Ej 4Documento4 páginasDEC Ej 4TomásAún no hay calificaciones
- Ley de Boyle & Ley de BernoulliDocumento8 páginasLey de Boyle & Ley de BernoulliHugo Sanchez PucAún no hay calificaciones
- PLANO ASISTENCIA AMBIENTAL-ModelDocumento1 páginaPLANO ASISTENCIA AMBIENTAL-ModeldermatusAún no hay calificaciones
- Método de Los MVADocumento4 páginasMétodo de Los MVADarny NuñezAún no hay calificaciones