También podría gustarte
- PRO-SGCA-33 Check List de PrensasDocumento2 páginasPRO-SGCA-33 Check List de PrensasIrvingValerianoAún no hay calificaciones
- Listado de EmbarqueDocumento1 páginaListado de EmbarqueIrvingValerianoAún no hay calificaciones
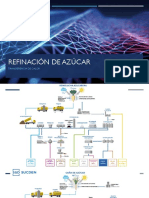
- Refinación de AzucarDocumento12 páginasRefinación de AzucarIrvingValerianoAún no hay calificaciones
- Cinematica de RobotsDocumento6 páginasCinematica de RobotsIrvingValerianoAún no hay calificaciones
- Calenderizacion de ProyectosDocumento11 páginasCalenderizacion de ProyectosIrvingValerianoAún no hay calificaciones
- Ejercicios ResueltosDocumento22 páginasEjercicios ResueltosNicolás Paredes40% (5)
- TEE-UNIDAD 2-Clasificación Geométrica de Los Sistemas de FuerzasDocumento33 páginasTEE-UNIDAD 2-Clasificación Geométrica de Los Sistemas de FuerzasJor-El Moreno67% (3)
- Postulados de Galileo GalileiDocumento14 páginasPostulados de Galileo GalileiSteeven BravoAún no hay calificaciones
- Unidades de Medida y SímbolosDocumento33 páginasUnidades de Medida y SímbolosAlbaProyectoAún no hay calificaciones
- Iso80000Documento5 páginasIso80000Alejandro IbarraAún no hay calificaciones
- Control IndustrialDocumento9 páginasControl IndustrialNando BryanAún no hay calificaciones
- Modelos Matematicos y Ecuaciones Diferenciales de Primer Orden.Documento19 páginasModelos Matematicos y Ecuaciones Diferenciales de Primer Orden.Valeria ValenciaAún no hay calificaciones
- Presentación - U.T. N°1 - Teoría de La Elasticidad 2022Documento47 páginasPresentación - U.T. N°1 - Teoría de La Elasticidad 2022LuchoisapAún no hay calificaciones
- Tecnologia de LeontiefDocumento22 páginasTecnologia de LeontiefrimfeAún no hay calificaciones
- Red MonicaDocumento70 páginasRed MonicaAlejandro Velasco Poquechoque0% (1)
- La Energía - SextosDocumento8 páginasLa Energía - SextosAngela Patricia Covaleda GavilanAún no hay calificaciones
- Primer Laboratorio de L1Documento9 páginasPrimer Laboratorio de L1GEORGE MICHAEL NUÑEZ BACAAún no hay calificaciones
- Tema 09 Flujo en Tuberias, Perdidas Primarias y SecundariasDocumento26 páginasTema 09 Flujo en Tuberias, Perdidas Primarias y SecundariasJosé Luis Bautista LópezAún no hay calificaciones
- S02.s2 - MaterialDocumento38 páginasS02.s2 - MaterialYulieta RgmAún no hay calificaciones
- GlosarioDocumento3 páginasGlosarioYuel AlexandroAún no hay calificaciones
- COULOMBIMETRÍADocumento23 páginasCOULOMBIMETRÍAjames3030Aún no hay calificaciones
- Combinaciones de CargaDocumento2 páginasCombinaciones de CargaeduarAún no hay calificaciones
- Trabajo Adolescente y Desercion Escolar en El PeruDocumento49 páginasTrabajo Adolescente y Desercion Escolar en El PeruCIES: Consorcio de Investigación Econimica y Social100% (1)
- Tema 4 Etapas de La EcuDocumento20 páginasTema 4 Etapas de La Ecujhon100% (8)
- Construyendo Un Generador Eléctrico en Base A Energia Hidráulica para Minimizar La Contaminación Ambiental (1) - 1Documento16 páginasConstruyendo Un Generador Eléctrico en Base A Energia Hidráulica para Minimizar La Contaminación Ambiental (1) - 1Aldair VillenaAún no hay calificaciones
- Titulaciones de Formacion de ComplejosDocumento7 páginasTitulaciones de Formacion de ComplejosYuki0054Aún no hay calificaciones
- "Las Estructuras Elementales Del Parentesco" Levi StraussDocumento3 páginas"Las Estructuras Elementales Del Parentesco" Levi Straussmaira0% (1)
- Las Implicaciones Locales, Regionales y Globales de La Operación de Sistemas Técnicos (Parte 1)Documento3 páginasLas Implicaciones Locales, Regionales y Globales de La Operación de Sistemas Técnicos (Parte 1)Rodolfo Hernandez100% (1)
- Monografía Turbina de Vapor y Ciclo RankineDocumento20 páginasMonografía Turbina de Vapor y Ciclo RankineEdward RoqueAún no hay calificaciones
- Perfilaje PDFDocumento15 páginasPerfilaje PDFDiego ObrequeAún no hay calificaciones
- PTI Deslastre de Carga Inteligente en Sistemas de OtenciaDocumento12 páginasPTI Deslastre de Carga Inteligente en Sistemas de OtenciagonzaloAún no hay calificaciones
- Manual TelarDocumento9 páginasManual TelarSusana Palacios100% (12)
- Ejemplo 1-TCDocumento5 páginasEjemplo 1-TCOMXR TAREASAún no hay calificaciones
- Examen Parcial Resuelto CompletoDocumento6 páginasExamen Parcial Resuelto CompletoTavo PinillaAún no hay calificaciones
- Pruebas de Rutina A Transformadores Trifacicos en Aceite Unidad 4Documento25 páginasPruebas de Rutina A Transformadores Trifacicos en Aceite Unidad 4MoySilvaCiriloAún no hay calificaciones