También podría gustarte
- Teoria de La Informacion - Actividad Evaluativa Eje 1Documento6 páginasTeoria de La Informacion - Actividad Evaluativa Eje 1Estiven Gallego CastañoAún no hay calificaciones
- Ayuda 1 Origen Historia y ClasificacionDocumento64 páginasAyuda 1 Origen Historia y ClasificacionNich ChecaAún no hay calificaciones
- Ayuda7 Conversion de GLP A GN 2015 - 3Documento58 páginasAyuda7 Conversion de GLP A GN 2015 - 3PEDROAún no hay calificaciones
- Ayuda 5 Usos Del Gas Natural en El TransporteDocumento55 páginasAyuda 5 Usos Del Gas Natural en El TransportekarenAún no hay calificaciones
- Ayuda8 Medidas de Seguridad 2015 - 2Documento92 páginasAyuda8 Medidas de Seguridad 2015 - 2karenAún no hay calificaciones
- Ayuda 3 Caracteristicas Del Gas NaturalDocumento72 páginasAyuda 3 Caracteristicas Del Gas NaturalMax PalaciosAún no hay calificaciones
- Ayuda 2 Cadena Del Gas NaturalDocumento73 páginasAyuda 2 Cadena Del Gas NaturalJavier ValverdeAún no hay calificaciones
- Analisis de Precios UnitariosDocumento27 páginasAnalisis de Precios UnitariosMarco De AndaAún no hay calificaciones
- Metodo de Explotacion ShrinkageDocumento34 páginasMetodo de Explotacion ShrinkageAUGUSTO MONDRAGONAún no hay calificaciones
- Resumen de Coca ColaDocumento5 páginasResumen de Coca ColaLizeth MorenoAún no hay calificaciones
- 1 Destrezas Del Siglo 21Documento8 páginas1 Destrezas Del Siglo 21paulitastarsAún no hay calificaciones
- Soladora Eléctrica CONVEY 260: Tfno. + 34 96 570 29 82 Fax: + 34 96 570 29 83Documento86 páginasSoladora Eléctrica CONVEY 260: Tfno. + 34 96 570 29 82 Fax: + 34 96 570 29 83FEMACONAún no hay calificaciones
- Acta Notarial de Declaracion JuradaDocumento2 páginasActa Notarial de Declaracion JuradaFredy OrozcoAún no hay calificaciones
- Matemáticas de 4ºDocumento81 páginasMatemáticas de 4ºJose CastroAún no hay calificaciones
- Isbn: 978-84-616-5991-3Documento147 páginasIsbn: 978-84-616-5991-3ChristianAún no hay calificaciones
- Respuestas de La Pregunta Nro11 OrientaciónDocumento5 páginasRespuestas de La Pregunta Nro11 Orientaciónrayber joseAún no hay calificaciones
- Apuntes de InstitucionesDocumento35 páginasApuntes de InstitucionesNoelia Álvaro Mensegar100% (2)
- Instructivo - DJ-05Documento6 páginasInstructivo - DJ-05Jose Perdigon100% (1)
- Formato Fichas Técnicas PosopeDocumento38 páginasFormato Fichas Técnicas PosopeTeo Pozo JAún no hay calificaciones
- Notebook HP 15 R005laDocumento3 páginasNotebook HP 15 R005lakanamasterAún no hay calificaciones
- Planificación Curricular 2024-Cap1Documento16 páginasPlanificación Curricular 2024-Cap1Juan José Guzmán0% (1)
- Instructivo de Acreditación de Personal NuevoDocumento7 páginasInstructivo de Acreditación de Personal NuevoJHORDY KENNY ROMERO GABRIELAún no hay calificaciones
- Informe de Ensayo TriaxialDocumento22 páginasInforme de Ensayo TriaxialWALTER ABRAHAM PACHECO POLLERAAún no hay calificaciones
- Historia Del Kanban - KaizenDocumento6 páginasHistoria Del Kanban - KaizenYeffersonAún no hay calificaciones
- Norma Calidad COMPOSTDocumento18 páginasNorma Calidad COMPOSTKimberly Kristin Carlos AquijeAún no hay calificaciones
- Equipos de LevanteDocumento20 páginasEquipos de LevanteRodrigo OrellanaAún no hay calificaciones
- ContenidoDocumento8 páginasContenidoDerlin Ventura neiraAún no hay calificaciones
- ¿Qué Estas Buscando?: Hello Kitty DisneyDocumento1 página¿Qué Estas Buscando?: Hello Kitty DisneyMarjory Jhoselyn Krisel Gutierrez EscalanteAún no hay calificaciones
- 1006tg1a 119kva 60hz 3-Phase - TradDocumento4 páginas1006tg1a 119kva 60hz 3-Phase - TradDianetUbillusMajoAún no hay calificaciones
- Tesis Lic. Pedagogia Luis Arturo Cano Vasquez TERMINADADocumento48 páginasTesis Lic. Pedagogia Luis Arturo Cano Vasquez TERMINADALuis CanoAún no hay calificaciones
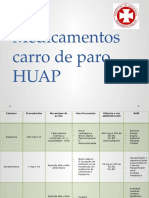
- Medicamentos Carro de ParoDocumento11 páginasMedicamentos Carro de ParodannyconcAún no hay calificaciones
- Trabajo Final de Termodinamica - GrupalDocumento10 páginasTrabajo Final de Termodinamica - GrupalFelipe TrujilloAún no hay calificaciones
- Módulo: Describir Los Actuadores OleohidráulicosDocumento14 páginasMódulo: Describir Los Actuadores OleohidráulicosFedor BancoffAún no hay calificaciones
- Condiciones Generales de ServicioDocumento5 páginasCondiciones Generales de ServicioUnidad 03Aún no hay calificaciones
- Guia PM10Documento3 páginasGuia PM10jorge.ramirez9331Aún no hay calificaciones