También podría gustarte
- 1 Ejercicios EnsambladorDocumento12 páginas1 Ejercicios EnsambladorRafael AntonioAún no hay calificaciones
- Describa Las Principales Características de Los Buses de CampoDocumento15 páginasDescriba Las Principales Características de Los Buses de CampoAndres MedinaAún no hay calificaciones
- Diseño de Una Red WanDocumento8 páginasDiseño de Una Red WanSYLVIAAún no hay calificaciones
- Test de Fundamentos de Las Redes 1Documento5 páginasTest de Fundamentos de Las Redes 1Kamilo Acevedo0% (1)
- Taller en Clases ArquicteturaDocumento2 páginasTaller en Clases ArquicteturaRUBEN DARIO SAA MONTAÑO100% (1)
- Traducción de Datasheet Atmega16Documento3 páginasTraducción de Datasheet Atmega16Frank Cabrera Salazar100% (1)
- CONCEPTOS DE SISTEMAS OPERATIVOSDocumento41 páginasCONCEPTOS DE SISTEMAS OPERATIVOSPablito Andres OlmedoAún no hay calificaciones
- Unidad Aritmetica Lógica 4 Bits (Informe)Documento5 páginasUnidad Aritmetica Lógica 4 Bits (Informe)Alex VinAún no hay calificaciones
- Mapa - Conceptual Placa Madre y Sus ComponentesDocumento2 páginasMapa - Conceptual Placa Madre y Sus ComponentesAlexaAún no hay calificaciones
- Informe Practica 3 CDocumento4 páginasInforme Practica 3 CDanilo JacomeAún no hay calificaciones
- Division de RedesDocumento11 páginasDivision de RedesLincoln_soto1Aún no hay calificaciones
- Manual Del Pic 16F877Documento53 páginasManual Del Pic 16F877marco,Aún no hay calificaciones
- Arquitectura de microprocesadores enDocumento32 páginasArquitectura de microprocesadores enEinie VegaAún no hay calificaciones
- Introducción Sistemas ProgramablesDocumento3 páginasIntroducción Sistemas ProgramablesFaustino David Diaz PechAún no hay calificaciones
- CIC500 - Trabajo Investigacion - T1 (Introduccion) T2 (Optimización Del Rendimiento Del Sistema - CPU) - II-2020Documento4 páginasCIC500 - Trabajo Investigacion - T1 (Introduccion) T2 (Optimización Del Rendimiento Del Sistema - CPU) - II-2020Victor Emanuel0% (1)
- John Ceballos - Tarea 1.3Documento8 páginasJohn Ceballos - Tarea 1.3سيبايوس جونAún no hay calificaciones
- Moss VoltaicsDocumento8 páginasMoss VoltaicsRicardo Lora MontellanoAún no hay calificaciones
- Sistemas Operativos - Taller 2-2Documento9 páginasSistemas Operativos - Taller 2-2Catalina TellezAún no hay calificaciones
- Trabajo Par o ImparDocumento3 páginasTrabajo Par o ImparSantiago Nieto VelandiaAún no hay calificaciones
- Abecedario 8086Documento7 páginasAbecedario 8086Luis de JesusAún no hay calificaciones
- Ejercicios Resueltos Fundamentos de RedesDocumento4 páginasEjercicios Resueltos Fundamentos de RedesSergioTorresAún no hay calificaciones
- Lab3 Turbo AssemblerDocumento7 páginasLab3 Turbo Assemblerfernando martinezAún no hay calificaciones
- Examen RedesDocumento5 páginasExamen RedesHermes SalazarAún no hay calificaciones
- PROFINETDocumento3 páginasPROFINETjohanna inchontaAún no hay calificaciones
- Componentes de Un MicrocontroladorDocumento5 páginasComponentes de Un MicrocontroladorBrendaAún no hay calificaciones
- Intraclase PH No.8Documento7 páginasIntraclase PH No.8Humberto CorreaAún no hay calificaciones
- 2.2.4.2 Lab - Flex Sensor and ServoDocumento3 páginas2.2.4.2 Lab - Flex Sensor and ServoMiguel AngelAún no hay calificaciones
- Prueba de diagnóstico de redes con 15 preguntasDocumento1 páginaPrueba de diagnóstico de redes con 15 preguntasGeiner ChacónAún no hay calificaciones
- 4.7 Servicios de La Gestión de MemoriaDocumento4 páginas4.7 Servicios de La Gestión de MemoriaMiguel Quispe CruzadaAún no hay calificaciones
- Taller Capitulo 13 PDFDocumento1 páginaTaller Capitulo 13 PDFCastrosito ValenciaAún no hay calificaciones
- Reporte - Asdsadass Práctica 6Documento3 páginasReporte - Asdsadass Práctica 6Esteban Ramirez GuatsozonAún no hay calificaciones
- Display de 7 Segmentos y Contador Del 0 Al 9Documento5 páginasDisplay de 7 Segmentos y Contador Del 0 Al 9Hévy PsicodeliaAún no hay calificaciones
- Tipos de Dispositivos InalambricosDocumento3 páginasTipos de Dispositivos InalambricosAnonymous nGu6rtOAún no hay calificaciones
- Microcontroladores PIC16F886Documento23 páginasMicrocontroladores PIC16F886Francisco Guadalupe Uc CanAún no hay calificaciones
- Sensores OpticosDocumento10 páginasSensores OpticosAnselmo Garcia EspinoAún no hay calificaciones
- Traduccion Del LM386Documento14 páginasTraduccion Del LM386Edgar Andres Cevallos RamirezAún no hay calificaciones
- PIC16F887: Características básicas del microcontrolador RISC de 35 instruccionesDocumento4 páginasPIC16F887: Características básicas del microcontrolador RISC de 35 instruccionesJuanJndAún no hay calificaciones
- Cuestionario Redes Final: Transporte, Aplicación, CableadoDocumento5 páginasCuestionario Redes Final: Transporte, Aplicación, CableadoKevin PazAún no hay calificaciones
- Implementar red pequeña Packet TracerDocumento3 páginasImplementar red pequeña Packet Tracerincognito 432Aún no hay calificaciones
- Proyecto BancoDocumento29 páginasProyecto BancoEfrain Tun UicabAún no hay calificaciones
- Sensor DispensadorDocumento3 páginasSensor DispensadorMauro Rodriguez0% (1)
- Direccionamiento y Enrutamiento IpDocumento16 páginasDireccionamiento y Enrutamiento IpMarixela De La Crux100% (1)
- Informe ProyectoDocumento6 páginasInforme ProyectoJorge ZambranoAún no hay calificaciones
- Informe Tecnología SATADocumento10 páginasInforme Tecnología SATAdevtapiaAún no hay calificaciones
- Direccionamiento Fisico EthernetDocumento6 páginasDireccionamiento Fisico Ethernetjuanitopedrito22Aún no hay calificaciones
- Historia de Los MicrocontroladoresDocumento7 páginasHistoria de Los MicrocontroladoresbajandodriversAún no hay calificaciones
- Parcial 3 Teorico Redes de ComputadorasDocumento6 páginasParcial 3 Teorico Redes de ComputadorasNelson PimentelAún no hay calificaciones
- Ejercicios de administración de redesDocumento2 páginasEjercicios de administración de redesPepe CecyteaAún no hay calificaciones
- Informe Gira TécnicaDocumento12 páginasInforme Gira TécnicaKevin Jhosue Pérez BenavidesAún no hay calificaciones
- Analisis de Componentes CpuDocumento16 páginasAnalisis de Componentes CpuJesús Melchor Hau NohAún no hay calificaciones
- Aplicaciones Distribuidas en Java Con Tecnologia RMIDocumento19 páginasAplicaciones Distribuidas en Java Con Tecnologia RMIErick DelgadoAún no hay calificaciones
- Actividad No 4 Estandares de Comunicaciones WANDocumento8 páginasActividad No 4 Estandares de Comunicaciones WANJorge MarinAún no hay calificaciones
- Dispositivos Alámbricos Modem, Switch, RouterDocumento4 páginasDispositivos Alámbricos Modem, Switch, RouterAriel FranciscoAún no hay calificaciones
- Arquitecturas MultiprocesamientoDocumento9 páginasArquitecturas MultiprocesamientoMirzha RojasAún no hay calificaciones
- Microprocesadores y Microcomputadoras PDFDocumento27 páginasMicroprocesadores y Microcomputadoras PDFLuis NaulaAún no hay calificaciones
- Microprocesadores y NanotecnologiaDocumento8 páginasMicroprocesadores y Nanotecnologiajavierandres17_mrojaAún no hay calificaciones
- C13 - VTP e InterVlan Routing v.1.5 PDFDocumento16 páginasC13 - VTP e InterVlan Routing v.1.5 PDFNes Alejandro CastilloAún no hay calificaciones
- Estructura de Datos Unidimensionales y BidimensionalesDocumento5 páginasEstructura de Datos Unidimensionales y BidimensionalesM4C5Aún no hay calificaciones
- Arquitectura CISC: Conjunto de instrucciones complejasDocumento6 páginasArquitectura CISC: Conjunto de instrucciones complejasLucy AndradeAún no hay calificaciones
- Tecnologia Risc y CiscDocumento5 páginasTecnologia Risc y CiscSonia CordovaAún no hay calificaciones
- Evaluación U2 PDFDocumento4 páginasEvaluación U2 PDFAyónPlayAún no hay calificaciones
- Solución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IDocumento5 páginasSolución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IPablo Santillán LopezAún no hay calificaciones
- CHATDocumento1 páginaCHATEduardo HernándezAún no hay calificaciones
- Ejercicios Variable Compleja CGFDocumento81 páginasEjercicios Variable Compleja CGFRosas Piña Julio AlejandroAún no hay calificaciones
- 1 GRM 001 Manual SgcsDocumento17 páginas1 GRM 001 Manual SgcsstivenrivasAún no hay calificaciones
- CURIOSIDADES AstrologiaDocumento5 páginasCURIOSIDADES AstrologiaLouisinneAn50% (2)
- Modos de VMDocumento7 páginasModos de VMLizbeth CMAún no hay calificaciones
- Autoevaluación Probabilidad y EstadisticaDocumento4 páginasAutoevaluación Probabilidad y EstadisticaMAún no hay calificaciones
- Ejemplos de Sistema de Lazo AbiertoDocumento7 páginasEjemplos de Sistema de Lazo AbiertoCINTHIA DEL ÁNGEL SANTIAGOAún no hay calificaciones
- Ejemplo 6 Modelo Estudios Previos Mínima CuantíaDocumento7 páginasEjemplo 6 Modelo Estudios Previos Mínima CuantíaDaniela FrancoAún no hay calificaciones
- Evaluación diagnóstica de mecánica vectorialDocumento3 páginasEvaluación diagnóstica de mecánica vectorialMilagros RamosAún no hay calificaciones
- Buenos Dias Mina Justa 2022.07.08Documento5 páginasBuenos Dias Mina Justa 2022.07.08Eloy Ayna AduviriAún no hay calificaciones
- TAREA I Música - ERIKAEUGENIDocumento3 páginasTAREA I Música - ERIKAEUGENIErika EugeniAún no hay calificaciones
- Ensayo - Aduanas y Su FuncionamientoDocumento3 páginasEnsayo - Aduanas y Su FuncionamientoKiara Joselyn Hernández VarguezAún no hay calificaciones
- Hechos Como Fundamentos JurídicosDocumento2 páginasHechos Como Fundamentos JurídicosTelvy Elizabeth Chamaya GuevaraAún no hay calificaciones
- Musculos de La PelvisDocumento10 páginasMusculos de La PelvisJulio Abelardo Gamio FernandezAún no hay calificaciones
- 4 - Guía Arreglos 2021Documento17 páginas4 - Guía Arreglos 2021AnaAún no hay calificaciones
- Dinastía II de EgiptoDocumento29 páginasDinastía II de EgiptoJuan Antonio MolinaAún no hay calificaciones
- Construccion ProyectorDocumento2 páginasConstruccion ProyectormthafarfanAún no hay calificaciones
- Catalogo Muebles 2Documento41 páginasCatalogo Muebles 2Rigoberto HerreraAún no hay calificaciones
- SRAMDocumento12 páginasSRAMque buenoAún no hay calificaciones
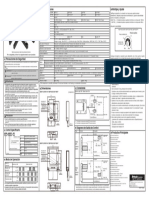
- Autonics Bup Esp ManualDocumento1 páginaAutonics Bup Esp ManualfchumpitazAún no hay calificaciones
- Desarrollo de Capacidades Fundamentales en Ciencias Naturales - MayoDocumento2 páginasDesarrollo de Capacidades Fundamentales en Ciencias Naturales - Mayojose pantaleoAún no hay calificaciones
- Orden de mérito estudiantes Ciencias de la ComunicaciónDocumento45 páginasOrden de mérito estudiantes Ciencias de la Comunicaciónpamela0% (2)
- Ejercicios de EstadísticaDocumento34 páginasEjercicios de EstadísticaFernanda GarmendezAún no hay calificaciones
- Subversion Musical en La RedDocumento16 páginasSubversion Musical en La RedVick RubinoAún no hay calificaciones
- Inmobiliaria y Construcciones Kaza EirlDocumento8 páginasInmobiliaria y Construcciones Kaza EirlElizabeth HuarotoAún no hay calificaciones
- Cursos para Especializacion en Geotecnia y Estabilidad de TaludesDocumento7 páginasCursos para Especializacion en Geotecnia y Estabilidad de Taludesandres jaenoAún no hay calificaciones
- Vigilancia Epidemiologica ActivaDocumento11 páginasVigilancia Epidemiologica ActivaDavid 221B0% (1)
- Tarea Académica 1 - Ensayo Sobre La Aplicación de Las TIC en El Proceso de E-ADocumento8 páginasTarea Académica 1 - Ensayo Sobre La Aplicación de Las TIC en El Proceso de E-AMisheyraLucayAún no hay calificaciones