También podría gustarte
- Matriz - Instalación Aire AcondicionadoDocumento3 páginasMatriz - Instalación Aire AcondicionadoConnie Baron86% (7)
- ESLINGASDocumento5 páginasESLINGASXXXFHERXXX100% (1)
- Cilindros de GasDocumento58 páginasCilindros de Gassolid34Aún no hay calificaciones
- 4 Líneas de TransmisiónDocumento64 páginas4 Líneas de TransmisiónyeferAún no hay calificaciones
- Controles para Refrigeracion CAREL PDFDocumento20 páginasControles para Refrigeracion CAREL PDFvicente manuel castello biosca100% (2)
- Protocolo para Casos de Extorsión 23set15Documento8 páginasProtocolo para Casos de Extorsión 23set15Miguel Angel DueñasAún no hay calificaciones
- Utel - Sistemas Digitales y Periféricos-Tarea Semana 3Documento5 páginasUtel - Sistemas Digitales y Periféricos-Tarea Semana 3Rodrigo Sandoval Durán100% (4)
- Hidrograma Unitario... Final..Documento23 páginasHidrograma Unitario... Final..zoly104Aún no hay calificaciones
- Informe de Turbina PeltonDocumento24 páginasInforme de Turbina PeltonSolorzano Chuquimantari Joubert100% (12)
- 8 Compromisos PAT 2015 CIRCADocumento6 páginas8 Compromisos PAT 2015 CIRCAXXXFHERXXXAún no hay calificaciones
- Impacto Ambiental Del Uso de Sustancias RefrigerantesDocumento11 páginasImpacto Ambiental Del Uso de Sustancias RefrigerantesXXXFHERXXXAún no hay calificaciones
- LAB 03-2019-1 Luis SancaDocumento12 páginasLAB 03-2019-1 Luis SancaXXXFHERXXXAún no hay calificaciones
- LeonDocumento5 páginasLeonXXXFHERXXXAún no hay calificaciones
- T12 Tareas de PrealineamientoDocumento6 páginasT12 Tareas de PrealineamientoXXXFHERXXXAún no hay calificaciones
- Refrigeracion en La Industria Farmaceutica y PetroquimicaDocumento10 páginasRefrigeracion en La Industria Farmaceutica y PetroquimicaXXXFHERXXXAún no hay calificaciones
- Refrigeracion en La Industria FarmaceuticaDocumento9 páginasRefrigeracion en La Industria FarmaceuticaXXXFHERXXXAún no hay calificaciones
- SESION 11 - Ejercicios de Cinematica de MecanismosDocumento9 páginasSESION 11 - Ejercicios de Cinematica de MecanismosXXXFHERXXXAún no hay calificaciones
- Refrigeracion en La Industria Farmaceutica y PetroquimicaDocumento10 páginasRefrigeracion en La Industria Farmaceutica y PetroquimicaXXXFHERXXXAún no hay calificaciones
- Informe Lab. 6Documento16 páginasInforme Lab. 6XXXFHERXXXAún no hay calificaciones
- Laboratorio 2 Estructuras MetalicasDocumento4 páginasLaboratorio 2 Estructuras MetalicasXXXFHERXXXAún no hay calificaciones
- Lab 2 RefirgeracionDocumento9 páginasLab 2 RefirgeracionXXXFHERXXXAún no hay calificaciones
- Estratégica Del MantenimientoDocumento13 páginasEstratégica Del MantenimientoXXXFHERXXXAún no hay calificaciones
- Silabo Estática 2016 IDocumento6 páginasSilabo Estática 2016 ISolange Lupe CoilaAún no hay calificaciones
- Diferencias IAT 16949Documento2 páginasDiferencias IAT 16949La MetalurgicaAún no hay calificaciones
- Propiedades Acusticas de Las RocasDocumento9 páginasPropiedades Acusticas de Las RocasWashington FloresAún no hay calificaciones
- Lavarropas Whirlpool AWG258Documento8 páginasLavarropas Whirlpool AWG258cerenautaAún no hay calificaciones
- Proceso de Aplicación Sikaflex 2C NSDocumento1 páginaProceso de Aplicación Sikaflex 2C NSCielito ElikitaAún no hay calificaciones
- Trabajo de Coiled TubingDocumento20 páginasTrabajo de Coiled TubingSilvana SerranoAún no hay calificaciones
- Practica de Subestaciones ElectricasDocumento4 páginasPractica de Subestaciones ElectricasDiana Valeria Romero TorresAún no hay calificaciones
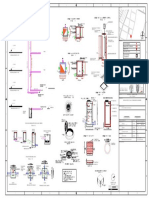
- Torre Pacari Hidrosanitario 25-05-2021-AASS Y AALL - pdf1Documento1 páginaTorre Pacari Hidrosanitario 25-05-2021-AASS Y AALL - pdf1joseAún no hay calificaciones
- Casa en Alquiler Maracay CodDocumento7 páginasCasa en Alquiler Maracay CodRonny A Sperandío HAún no hay calificaciones
- Medidor de Intensidad de Lector Láser de CD y DVDDocumento3 páginasMedidor de Intensidad de Lector Láser de CD y DVDcarlos16702014Aún no hay calificaciones
- 3 OfimaticaDocumento24 páginas3 OfimaticamarcosAún no hay calificaciones
- Uav Sirius PDFDocumento24 páginasUav Sirius PDFAdrian Guerra MedranoAún no hay calificaciones
- Manual de Uso SONOBAT - 3 PDFDocumento26 páginasManual de Uso SONOBAT - 3 PDFAnonymous IRUQu9dAún no hay calificaciones
- Formato de Syllabus Estabilidad de TaludesDocumento4 páginasFormato de Syllabus Estabilidad de TaludesAndres Felipe Bernal VillateAún no hay calificaciones
- Inspeccion de Obras de ConcretoDocumento17 páginasInspeccion de Obras de ConcretoJuan GonzalezAún no hay calificaciones
- Amtd Amtd-504 FormatoalumnotrabajofinalDocumento7 páginasAmtd Amtd-504 FormatoalumnotrabajofinalEver Villanueva VilcaAún no hay calificaciones
- CV Robert BritoDocumento2 páginasCV Robert BritoRobert Oliver Brito MatamorosAún no hay calificaciones
- Fundamentos de Programacion 2Documento4 páginasFundamentos de Programacion 2jtircio2613Aún no hay calificaciones
- Diapositiva Bombas CentrifugasDocumento34 páginasDiapositiva Bombas CentrifugasEver LopezAún no hay calificaciones
- Silabus ElectrotecniaDocumento7 páginasSilabus ElectrotecniaAnderson CRAún no hay calificaciones
- Uso de Estructuras Algorítmicas RepetitivasDocumento15 páginasUso de Estructuras Algorítmicas RepetitivasDacireth Perez Clavel100% (2)
- Filtro BiologicoDocumento3 páginasFiltro Biologicoadolfocaroaguilar100% (4)
- Inspección de GrúasDocumento3 páginasInspección de GrúasMarcelo LazaroAún no hay calificaciones