También podría gustarte
- Solución Ejemplo (Marco Doblemente Empotrado) - Carga PuntualDocumento5 páginasSolución Ejemplo (Marco Doblemente Empotrado) - Carga PuntualEnrique MouAún no hay calificaciones
- Análisis y Diseño de Losas Macizas Bidireccionales - Método de Coeficientes (HP 50g)Documento48 páginasAnálisis y Diseño de Losas Macizas Bidireccionales - Método de Coeficientes (HP 50g)Jhonhy Terra VilaAún no hay calificaciones
- Cronograma Tipo Implementación PREXORDocumento2 páginasCronograma Tipo Implementación PREXORKar Iss67% (6)
- TI041 Proceso Del Negocio Del Software AUTOEVALUACIONDocumento16 páginasTI041 Proceso Del Negocio Del Software AUTOEVALUACIONClaudia Gonzales100% (1)
- CONCURSO-NACIONAL-DE-PÓRTICOS-DE-CONCRETO-ARMADO. Coneic 2013Documento8 páginasCONCURSO-NACIONAL-DE-PÓRTICOS-DE-CONCRETO-ARMADO. Coneic 2013Rodrigo PereyraAún no hay calificaciones
- Análisis y Diseño de Losas AligeradasDocumento10 páginasAnálisis y Diseño de Losas AligeradasJonnathan Camargo OrozcoAún no hay calificaciones
- Grupo 5 (Isr13610-Act3-G5)Documento4 páginasGrupo 5 (Isr13610-Act3-G5)Victor Ramos GonzalesAún no hay calificaciones
- Sesin 2. Slope Deflection PDFDocumento44 páginasSesin 2. Slope Deflection PDFNelvin GarcíaAún no hay calificaciones
- Cercha Ejemplo42aDocumento22 páginasCercha Ejemplo42aRoger Sanchez VillaAún no hay calificaciones
- Método de Amplificación de MomentosDocumento4 páginasMétodo de Amplificación de MomentosDiana Valdivia Quelopana0% (1)
- Análisis Del Comportamiento A Tracción Del Acero y Falla Estructural en VigasDocumento2 páginasAnálisis Del Comportamiento A Tracción Del Acero y Falla Estructural en VigasANDRE JESUS ROJAS GUTIERREZAún no hay calificaciones
- BasuraDocumento69 páginasBasuraJefferson QuevedoAún no hay calificaciones
- Trazado de EspiralesDocumento17 páginasTrazado de EspiralesJesús Cabrera CabreraAún no hay calificaciones
- Practica Sifones AcueductosDocumento2 páginasPractica Sifones AcueductosSAUL PACOMPIA (Edson PQT)0% (1)
- Ecuaciones CanónicasDocumento3 páginasEcuaciones CanónicasAbel Bonifacio VergaraAún no hay calificaciones
- Diagramas Interacccion HarmsenDocumento32 páginasDiagramas Interacccion HarmsenVíctor VásquezAún no hay calificaciones
- Cap 13 Obras de Artes en CanalesDocumento12 páginasCap 13 Obras de Artes en CanalesSareth TeranAún no hay calificaciones
- Presion de Suelos en ReposoDocumento6 páginasPresion de Suelos en ReposoElizabeth Diana Gomez SantanaAún no hay calificaciones
- Wieczorek PresentacionDocumento12 páginasWieczorek PresentacionCarlos PonceAún no hay calificaciones
- Tema I - Introduccion Al Diseño VialDocumento13 páginasTema I - Introduccion Al Diseño Vialdarwing cañongoAún no hay calificaciones
- 18.02 Estudio HidrológicoDocumento20 páginas18.02 Estudio Hidrológicoandres reyesAún no hay calificaciones
- Fórmulas para El Diseño de Vigas Simplemente Armadas, Losas MacizasDocumento7 páginasFórmulas para El Diseño de Vigas Simplemente Armadas, Losas MacizasLulú Marcial Cerón100% (1)
- Clase 7 Obras Hidrotécnicas de Aplicaciones Específicas-1515687134Documento18 páginasClase 7 Obras Hidrotécnicas de Aplicaciones Específicas-1515687134CLIP2014Aún no hay calificaciones
- Consulta de Parteres, Vallas y Obras de Defensa - Sebastián NovoaDocumento3 páginasConsulta de Parteres, Vallas y Obras de Defensa - Sebastián Novoasebastian novoaAún no hay calificaciones
- El Adobe (Informe)Documento9 páginasEl Adobe (Informe)Alberth Zarate UmeresAún no hay calificaciones
- Metodo BresseDocumento14 páginasMetodo BresseAnonymous 0O06IbFauUAún no hay calificaciones
- Estabilidad de Sistemas ElásticosDocumento24 páginasEstabilidad de Sistemas ElásticosGeiner TarrilloAún no hay calificaciones
- Lista de SimbolosDocumento2 páginasLista de SimbolosAbraham Rojas Barrueta100% (1)
- Examen II CaptaciónDocumento80 páginasExamen II CaptaciónWilliam Sevillano LopezAún no hay calificaciones
- Practica 5Documento13 páginasPractica 5Juan Daniel Calderón CarvalhoAún no hay calificaciones
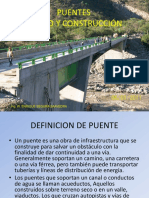
- PUENTES PiuraDocumento122 páginasPUENTES PiuraDarwin Alexander Villegas SilvaAún no hay calificaciones
- Condiciones de FronteraDocumento7 páginasCondiciones de FronteraAbisahi Peral OrtizAún no hay calificaciones
- R. M. I-Uns - S 06 Uns-2020 PDFDocumento32 páginasR. M. I-Uns - S 06 Uns-2020 PDFAlexisPalominoJulcaAún no hay calificaciones
- Diseño de Canales Sin RevestirDocumento17 páginasDiseño de Canales Sin Revestirstid aldanaAún no hay calificaciones
- Aliviadores LateralesDocumento7 páginasAliviadores LateralesAlexander VizcainoAún no hay calificaciones
- Informe de Diseño de DesarenadorDocumento6 páginasInforme de Diseño de DesarenadorBolívar Eduardo Caraguay GómezAún no hay calificaciones
- Problema 1 Capitulo 4Documento36 páginasProblema 1 Capitulo 4Anonymous pk3dJaAún no hay calificaciones
- Biomasa FijaDocumento14 páginasBiomasa FijaAndrea M. BarrientosAún no hay calificaciones
- Tuberias en Paralelo y Tanques InterconectadosDocumento1 páginaTuberias en Paralelo y Tanques InterconectadosEdilberto Valdes0% (1)
- Tecno Losa Aligerada 23Documento23 páginasTecno Losa Aligerada 23gian marco0% (1)
- Comportamiento de Losas en Dos Direcciones ApoyadasDocumento3 páginasComportamiento de Losas en Dos Direcciones ApoyadasAlexandra RomeroAún no hay calificaciones
- CLASE 11 LINEA DE CONDUCCION 2018 II 05 NovDocumento47 páginasCLASE 11 LINEA DE CONDUCCION 2018 II 05 NovOdali Pamela Cayo MermaAún no hay calificaciones
- Defensas Ribereñas y Obras TransversalesDocumento2 páginasDefensas Ribereñas y Obras Transversalesdaniel1411100% (1)
- Métodos para Calcular La Población FuturaDocumento10 páginasMétodos para Calcular La Población FuturaMiguel RiveraAún no hay calificaciones
- Metodo Us National Weather ServiceDocumento2 páginasMetodo Us National Weather ServiceBrandon Gabriel Carrasco GarcíaAún no hay calificaciones
- Cap 07 Resalto HidráulicoDocumento7 páginasCap 07 Resalto HidráulicoDiego MirandaAún no hay calificaciones
- Fuerza TractivaDocumento3 páginasFuerza TractivaDiego SimonsAún no hay calificaciones
- 5 Geologia, Suelos y PavimentosDocumento56 páginas5 Geologia, Suelos y PavimentosJasmin Melina Barahona HuertoAún no hay calificaciones
- Diseño de Columnas A CompresionDocumento8 páginasDiseño de Columnas A CompresionWillians RGAún no hay calificaciones
- INFORME LABORATORIO HIDRAULICA fLUJO DE CANALESDocumento16 páginasINFORME LABORATORIO HIDRAULICA fLUJO DE CANALESMateo PuninAún no hay calificaciones
- Acero de Refuerzo PDFDocumento4 páginasAcero de Refuerzo PDFManuelAún no hay calificaciones
- Escaleera de Peces en Una Obra HidráulicaDocumento20 páginasEscaleera de Peces en Una Obra HidráulicaSpmdibu CucaAún no hay calificaciones
- Vias de Comunicacion - Curvas HorizontalesDocumento28 páginasVias de Comunicacion - Curvas HorizontalesMelany Jimenez CAún no hay calificaciones
- Rigidez-Analisis EstructuralDocumento18 páginasRigidez-Analisis EstructuralRuben Machaca PerezAún no hay calificaciones
- Análisis Estructural Por El Método de Rigidez en 2DDocumento39 páginasAnálisis Estructural Por El Método de Rigidez en 2DRuben Machaca PerezAún no hay calificaciones
- Analisis de Matriz Estructural IIDocumento10 páginasAnalisis de Matriz Estructural IIPercy Obando AdrianzenAún no hay calificaciones
- Analisis Tridimensional DiafragmaDocumento14 páginasAnalisis Tridimensional DiafragmaRAIZA NICKOLEAún no hay calificaciones
- Reporte Teórico PDFDocumento9 páginasReporte Teórico PDFgreco626Aún no hay calificaciones
- ARMADURASDocumento9 páginasARMADURASDIDI ANTONY LEON GOMEZAún no hay calificaciones
- CAPITULO 1. Introduccion Al Analisis EstructuralDocumento5 páginasCAPITULO 1. Introduccion Al Analisis EstructuralZam Martin Zeña ArmasAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Valorizacion 1Documento13 páginasValorizacion 1Jhon CuadrosAún no hay calificaciones
- Muro de Contencion01Documento6 páginasMuro de Contencion01Jhon CuadrosAún no hay calificaciones
- Como Poner Desplaximeto en El Sap2000Documento3 páginasComo Poner Desplaximeto en El Sap2000Jhon CuadrosAún no hay calificaciones
- Primer Examen de Concreto Armado 1Documento2 páginasPrimer Examen de Concreto Armado 1giominino80% (5)
- Enfermedades Transmitidas Por El AguaDocumento12 páginasEnfermedades Transmitidas Por El AguaJhon CuadrosAún no hay calificaciones
- Tecnologia MultimediaDocumento3 páginasTecnologia Multimediaesperanzita11_2Aún no hay calificaciones
- Integracion ComplejaDocumento4 páginasIntegracion ComplejaMarco Alejandro Teran Aguilar100% (1)
- BRFplus Overview ESDocumento41 páginasBRFplus Overview ESSulma Jimena Díaz Puma100% (1)
- Algoritmos JOptionPaneDocumento14 páginasAlgoritmos JOptionPaneLEYDI CAROLINA ALFONSO BOHORQUEZAún no hay calificaciones
- Principios de Transmisión de InformaciónDocumento34 páginasPrincipios de Transmisión de Informaciónjazoviedo75% (4)
- Propiedades y Tablas de PerteneciaDocumento25 páginasPropiedades y Tablas de PerteneciaHenry Edison Marihuen AguilaAún no hay calificaciones
- Curso Completo de MineSight PDFDocumento4 páginasCurso Completo de MineSight PDFYener M. Avila LozanoAún no hay calificaciones
- 15 - 10 - 2019 - Inge DaniDocumento4 páginas15 - 10 - 2019 - Inge DaniPris AlvaradoAún no hay calificaciones
- Amaro Silabo Probabilidad y Estadística. EsDocumento6 páginasAmaro Silabo Probabilidad y Estadística. EsRuben Dario PeraltaAún no hay calificaciones
- Deber Tipo de ConexionesDocumento2 páginasDeber Tipo de ConexionessiixtooooooAún no hay calificaciones
- ComplejidadDocumento8 páginasComplejidadCati VenteAún no hay calificaciones
- SustentacionDocumento8 páginasSustentacionmariaAún no hay calificaciones
- InstruccionesDocumento3 páginasInstruccionesmonica pilarAún no hay calificaciones
- INTARTDocumento15 páginasINTARTWylo HmmlAún no hay calificaciones
- Modelo Scada de Planta de Agua SedapalDocumento11 páginasModelo Scada de Planta de Agua SedapalcamenAún no hay calificaciones
- IODocumento15 páginasIOMaricielo SandovalAún no hay calificaciones
- Matriz de VandermondeDocumento3 páginasMatriz de Vandermondeapi-19798868Aún no hay calificaciones
- Dibujo Mecánico en Cad Mei Itbc El Paso PDFDocumento55 páginasDibujo Mecánico en Cad Mei Itbc El Paso PDFJhamil Churqui Miranda100% (2)
- Aportes de Josiah Willard Gibbs A Los VectoresDocumento12 páginasAportes de Josiah Willard Gibbs A Los VectoresKevinPolyglot0% (1)
- Andoni Arias - CV - 2016 PDFDocumento2 páginasAndoni Arias - CV - 2016 PDFAndoni AriasAún no hay calificaciones
- DoolittleDocumento11 páginasDoolittleMiguel CujilemaAún no hay calificaciones
- Matriz de Consistencia de Una TesisDocumento1 páginaMatriz de Consistencia de Una TesisJuan Carlos Campos AlbornozAún no hay calificaciones
- Alg Semi2 2012-IDocumento3 páginasAlg Semi2 2012-IAlexis Esmith Castañeda RequejoAún no hay calificaciones
- LobosDocumento13 páginasLobosAngelito PVAún no hay calificaciones
- Manual ObnateDocumento23 páginasManual ObnateUgel TarmaAún no hay calificaciones
- Cursos AerocamDocumento1 páginaCursos AerocamEstebanTurpo AnchapuriAún no hay calificaciones
- 9.2 Procedimiento de Auditorias InternasDocumento6 páginas9.2 Procedimiento de Auditorias InternasKary YanetAún no hay calificaciones
- Manual Abastecimiento OC - OS Del SIGA MEFDocumento25 páginasManual Abastecimiento OC - OS Del SIGA MEFFilemon Sulca PeñaAún no hay calificaciones