También podría gustarte
- MMS Como UsarDocumento12 páginasMMS Como Usarlabritob100% (5)
- Productividad de La ConstrucciónDocumento27 páginasProductividad de La ConstrucciónFrancisco TelloAún no hay calificaciones
- Mecanismos de Coordinación de MintzbergDocumento16 páginasMecanismos de Coordinación de MintzbergFrancisco TelloAún no hay calificaciones
- Trabajo Seagram PDFDocumento19 páginasTrabajo Seagram PDFFrancisco TelloAún no hay calificaciones
- Fracción de Amortiguamiento CríticoDocumento5 páginasFracción de Amortiguamiento CríticoFrancisco TelloAún no hay calificaciones
- El Origen de Los SismosDocumento24 páginasEl Origen de Los SismosFrancisco TelloAún no hay calificaciones
- Proyecto Dovelas 2Documento3 páginasProyecto Dovelas 2Francisco TelloAún no hay calificaciones
- Articulo FinalDocumento11 páginasArticulo FinalFrancisco TelloAún no hay calificaciones
- Articulo 2Documento7 páginasArticulo 2Francisco TelloAún no hay calificaciones
- Activos AmbientalesDocumento15 páginasActivos AmbientalesMonii Wanda100% (1)
- Hormona ParatiroideaDocumento67 páginasHormona ParatiroideamarisabelpintovAún no hay calificaciones
- Teoria de Lo Feo y Lo Ordinario - Ricardo Wong - 4M2Documento2 páginasTeoria de Lo Feo y Lo Ordinario - Ricardo Wong - 4M2Ricardo WongAún no hay calificaciones
- Florescano, Enrique, Antiguas y Nuevas Imagenes de Los MayasDocumento5 páginasFlorescano, Enrique, Antiguas y Nuevas Imagenes de Los MayasJOSEAún no hay calificaciones
- Cuadro de Equivalencias AdministracionDocumento8 páginasCuadro de Equivalencias AdministracionAngeles angelesAún no hay calificaciones
- G.P. Genética Humana'Documento16 páginasG.P. Genética Humana'Juan RomanAún no hay calificaciones
- Inventario Inteligencias MultiplesDocumento6 páginasInventario Inteligencias MultiplesEdgar Antonio Galdamez0% (1)
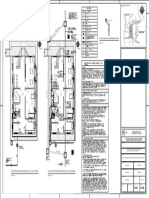
- 19-Ih-01-Plano de Ih - de Agua Potable y NegrasDocumento1 página19-Ih-01-Plano de Ih - de Agua Potable y NegrasAlfonso CanalesAún no hay calificaciones
- Involucramiento de La Comunidad en El Turismo de Vida SilvestreDocumento12 páginasInvolucramiento de La Comunidad en El Turismo de Vida SilvestreAlvaroWladimirVasquezVasquezAún no hay calificaciones
- La Lista de Chequeo Un Estandar de CuidadoDocumento2 páginasLa Lista de Chequeo Un Estandar de CuidadoNick AdamsAún no hay calificaciones
- Trabajo Final ProDocumento44 páginasTrabajo Final ProAndrés GarciaAún no hay calificaciones
- Ejercicios INFERENCIA EliecerDocumento4 páginasEjercicios INFERENCIA EliecerRamon MaestreAún no hay calificaciones
- Moodle EstudianteDocumento32 páginasMoodle EstudianteAlejandro Velasco100% (1)
- Tipos de FracturasDocumento4 páginasTipos de FracturasJUANBETTAún no hay calificaciones
- PLANIFICACIÓN MICROCURRICULAR POR PARCIAL 6TO NicoDocumento6 páginasPLANIFICACIÓN MICROCURRICULAR POR PARCIAL 6TO NicoPaola Raquel RodrigezAún no hay calificaciones
- 27° Día Consagración Sagrado CorazónDocumento4 páginas27° Día Consagración Sagrado CorazónJulio FranjulAún no hay calificaciones
- Ignacio de Catera y PadreDocumento42 páginasIgnacio de Catera y PadreCarlos Juarez SalazarAún no hay calificaciones
- Ficha de Sintomatología Covid 19Documento2 páginasFicha de Sintomatología Covid 19Martin Sobrados RiveraAún no hay calificaciones
- Toma de Datos y Manejo de Información ExperimentalDocumento26 páginasToma de Datos y Manejo de Información ExperimentalJuan Sebastian Hincapie MontesAún no hay calificaciones
- Separata de MATRICESDocumento40 páginasSeparata de MATRICESCristian Salazar SaenzAún no hay calificaciones
- Informe de Aprovechamiento 2013Documento21 páginasInforme de Aprovechamiento 2013José Vicente Cueva Torres0% (1)
- Guia 7 GRADO NOVENODocumento3 páginasGuia 7 GRADO NOVENOLobita 22 uwuwAún no hay calificaciones
- Circuitos SecuencialesDocumento61 páginasCircuitos SecuencialesRonald Darwin Velez ZambranoAún no hay calificaciones
- El Impacto Del Ser HumanoDocumento7 páginasEl Impacto Del Ser HumanoSteven RiveraAún no hay calificaciones
- Situacional 2020Documento51 páginasSituacional 2020Leylanni JAún no hay calificaciones
- Tallado de Flores Con Base Conica y Aplicacion de La Tecnica Del Boleado-Procedimiento 01,02,03Documento1 páginaTallado de Flores Con Base Conica y Aplicacion de La Tecnica Del Boleado-Procedimiento 01,02,03DavidAún no hay calificaciones
- AMOR TUMBADO, Natanael Cano - AcordesDocumento1 páginaAMOR TUMBADO, Natanael Cano - AcordesRdAún no hay calificaciones
- ApuntesDocumento21 páginasApuntesMari Luz RomeroAún no hay calificaciones
- Guia 23 Noveno Campo de ComunicacionDocumento6 páginasGuia 23 Noveno Campo de ComunicacionMaria Rocio Sisa OrtizAún no hay calificaciones