También podría gustarte
- Escala de A. Moles IconicidadDocumento2 páginasEscala de A. Moles IconicidadMartin Cepeda NietoAún no hay calificaciones
- Reporte Lab Fisi1 S07 Mi CBTDocumento3 páginasReporte Lab Fisi1 S07 Mi CBTchristian020797Aún no hay calificaciones
- L.G. de HOOKEDocumento16 páginasL.G. de HOOKEronaldAún no hay calificaciones
- Cartel de Contenidos Diversificados Del Área de MatemáticaDocumento6 páginasCartel de Contenidos Diversificados Del Área de MatemáticaLuis Eduardo Lara HenriquezAún no hay calificaciones
- Resolucion de Triangulos EjerciciosDocumento2 páginasResolucion de Triangulos EjerciciosLoko PituxoAún no hay calificaciones
- Transformaciones Geométricas II PeriodoDocumento3 páginasTransformaciones Geométricas II PeriodoDeysi Yurley RolónAún no hay calificaciones
- Líneas y Puntos Notables de Un TriánguloDocumento10 páginasLíneas y Puntos Notables de Un Triángulojuangeoma33% (3)
- 7ºC Geo Guia1.PoligonosDocumento6 páginas7ºC Geo Guia1.PoligonosLorena ReyesAún no hay calificaciones
- Final de Geometría Con Regla y CompásDocumento28 páginasFinal de Geometría Con Regla y CompásromifpegoAún no hay calificaciones
- Modulo Cinematica de Particula 1Documento146 páginasModulo Cinematica de Particula 1alfonso castro100% (1)
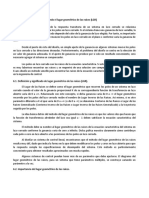
- Lugar Geométrico de Las RaícesDocumento2 páginasLugar Geométrico de Las RaícesyolieskaAún no hay calificaciones
- Formulas y Procedimientos de Caldereria 2019 PDFDocumento194 páginasFormulas y Procedimientos de Caldereria 2019 PDFGilberto Zamudio80% (15)
- Guia Matematicas 2 Periodo Gabriela Castiblanco Torres 1102Documento39 páginasGuia Matematicas 2 Periodo Gabriela Castiblanco Torres 1102María Fernanda CastiblancoAún no hay calificaciones
- CUADRILATEROSDocumento3 páginasCUADRILATEROSalexander50% (2)
- Superficies CuádricasDocumento2 páginasSuperficies CuádricaskarenAún no hay calificaciones
- HipérbolaDocumento23 páginasHipérbolaEdgar De LozaAún no hay calificaciones
- Aua104 2014 Geometria Descriptiva Ma RochaDocumento4 páginasAua104 2014 Geometria Descriptiva Ma RochaAlcides Arturo López CadilloAún no hay calificaciones
- Puntos de Adherencia y AcumulacionDocumento6 páginasPuntos de Adherencia y AcumulaciondanielsAún no hay calificaciones
- Presentación FyR Etapa 4Documento47 páginasPresentación FyR Etapa 4DavidAún no hay calificaciones
- Movimiento de Una Particula en Una Dimension - Carlos BarrenecheaDocumento50 páginasMovimiento de Una Particula en Una Dimension - Carlos BarrenecheaAnderson Reyes100% (1)
- Parte 1Documento4 páginasParte 1carolinaAún no hay calificaciones
- Proyecto Aprendizaje PrimariaDocumento7 páginasProyecto Aprendizaje PrimariaHARRINSONAún no hay calificaciones
- Lista de Ejercicios Semana 15 Sesion 1Documento2 páginasLista de Ejercicios Semana 15 Sesion 1Luis Alex TqAún no hay calificaciones
- Trigonometria 2Documento8 páginasTrigonometria 2ANthonyAún no hay calificaciones
- Primer Examen Parcial de Tolerancias Geométricas PDFDocumento10 páginasPrimer Examen Parcial de Tolerancias Geométricas PDFJesus Abdiel Alvarez RangelAún no hay calificaciones
- El Espacio y Las Formas GeométricasDocumento4 páginasEl Espacio y Las Formas Geométricasdavid14_2009Aún no hay calificaciones
- Taller Sobre Cicunferencias, ElipseDocumento4 páginasTaller Sobre Cicunferencias, ElipseLeonel SandersAún no hay calificaciones
- Ficha Tecnica Prueba Matematica 7 BASICODocumento8 páginasFicha Tecnica Prueba Matematica 7 BASICOValentina BalladaresAún no hay calificaciones
- Wuolah Free Espacios VectorialesDocumento10 páginasWuolah Free Espacios VectorialesFedeAún no hay calificaciones