También podría gustarte
- Certificado - Manager Ingenieria y Construccion EirlDocumento1 páginaCertificado - Manager Ingenieria y Construccion EirlChristian LoureiroAún no hay calificaciones
- Actividades para Desarrollar Habilidades Motrices en Niños Con Sindrome de DownDocumento13 páginasActividades para Desarrollar Habilidades Motrices en Niños Con Sindrome de DownAdriana AyolaAún no hay calificaciones
- Puno 21 6Documento22 páginasPuno 21 6carlos_mamani_19Aún no hay calificaciones
- Emergencias en UrologíaDocumento58 páginasEmergencias en UrologíaGamarra Pazo Jose100% (2)
- Manual para Hacer Coplas de Manera FácilDocumento2 páginasManual para Hacer Coplas de Manera FácilIsabella Red'sAún no hay calificaciones
- Colección Ejercicios 2022Documento21 páginasColección Ejercicios 2022francisco javier fumero díaz100% (1)
- Silabo de Informática E Internet I. Datos Generales:: Instituto Superior Tecnológico Público "Nueva Esperanza"Documento5 páginasSilabo de Informática E Internet I. Datos Generales:: Instituto Superior Tecnológico Público "Nueva Esperanza"En CreaciónAún no hay calificaciones
- Análisis Instrumental. - AlumnosDocumento13 páginasAnálisis Instrumental. - AlumnosangelicaAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO - PSICOMETRIA - (GRUPO B02) 2 QuizDocumento5 páginasActividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO - PSICOMETRIA - (GRUPO B02) 2 QuizBeta Diaz AlexaAún no hay calificaciones
- Check ListDocumento1 páginaCheck ListFRANCISCO DE LA CRUZ FIESTASAún no hay calificaciones
- Informe Tributario - Venta de PredioDocumento5 páginasInforme Tributario - Venta de PredioJuan Antonio VermejoAún no hay calificaciones
- ACFrOgAY8uvNNTeM2Di0DL29Z95I7rK4FO7zPRQOXmEt79o Ik2tjl IAajLfnlIigdzyQXHCp6EUThvikjDyvzV8Mv03p04WFPzxMvv QTZxXnmI-R6jW KfSayO33IJw7CpsvZoplDetgzSbYiDocumento7 páginasACFrOgAY8uvNNTeM2Di0DL29Z95I7rK4FO7zPRQOXmEt79o Ik2tjl IAajLfnlIigdzyQXHCp6EUThvikjDyvzV8Mv03p04WFPzxMvv QTZxXnmI-R6jW KfSayO33IJw7CpsvZoplDetgzSbYiMicaela CcoyaAún no hay calificaciones
- CurpDocumento1 páginaCurpmarlon rodriguez carretoAún no hay calificaciones
- Guía EmigrantesDocumento7 páginasGuía EmigrantesWenndy Marjorie Concha MuñozAún no hay calificaciones
- Taller FísicaDocumento9 páginasTaller FísicaSofia Lombana FinoAún no hay calificaciones
- Cambio de Unidad Sutrappa Septiembre 2015 PDFDocumento44 páginasCambio de Unidad Sutrappa Septiembre 2015 PDFMartin AlmandozAún no hay calificaciones
- Brochure Diplomado Nacional Corredor Corredor de Seguros Generales y VidaDocumento11 páginasBrochure Diplomado Nacional Corredor Corredor de Seguros Generales y VidaAlejandroAún no hay calificaciones
- La Teoría de Los Enlaces QuímicosDocumento8 páginasLa Teoría de Los Enlaces QuímicosAzael Gracia cuevasAún no hay calificaciones
- PIPC - IMSS Versión 16 - 01 - 2023Documento108 páginasPIPC - IMSS Versión 16 - 01 - 2023Andy Patiño100% (1)
- SuperunidadDocumento10 páginasSuperunidadmauro rodriguezAún no hay calificaciones
- Mapa EmpatiaDocumento1 páginaMapa Empatialuis anayaAún no hay calificaciones
- Trabajo Mecánico en Caliente y en FríoDocumento86 páginasTrabajo Mecánico en Caliente y en FríoPollo LozanoAún no hay calificaciones
- Tabla Producciones PorcicolasDocumento79 páginasTabla Producciones PorcicolasEduardo Daniel Mayorga CarvajalAún no hay calificaciones
- LIC191Documento60 páginasLIC191Ignacio MarínAún no hay calificaciones
- Clasificación de Los BarcosDocumento21 páginasClasificación de Los BarcosDuvan MarrugoAún no hay calificaciones
- Protocolo de Pruebas Resistencia de Aislamiento Cable Nyy NV 10Documento4 páginasProtocolo de Pruebas Resistencia de Aislamiento Cable Nyy NV 10Fidel MAURICIO RIVERA100% (2)
- Craneeo RXDocumento38 páginasCraneeo RXEmily Ojeda GaxiolaAún no hay calificaciones
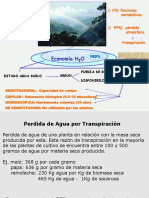
- TranspiracionDocumento39 páginasTranspiracionJUAN PABLO BOLIVAR HIGUITAAún no hay calificaciones
- Celdas SolaresDocumento3 páginasCeldas SolaresjorsaezAún no hay calificaciones
- Glosario de Dibujo Tecnico II 606B PDFDocumento31 páginasGlosario de Dibujo Tecnico II 606B PDFJorge Luis Cruz LaverdeAún no hay calificaciones