También podría gustarte
- Programación MultiobjetivoDocumento55 páginasProgramación MultiobjetivoIrene Clemente50% (2)
- Actividad ParcialDocumento4 páginasActividad Parciallamb of god lamb of god100% (1)
- Optimizacion en Ingenieria Quimica (Udec) PDFDocumento88 páginasOptimizacion en Ingenieria Quimica (Udec) PDFSofia Mac Rodri100% (1)
- Funcion ObjetivoDocumento35 páginasFuncion ObjetivoRodrigo Ramirez GaldamezAún no hay calificaciones
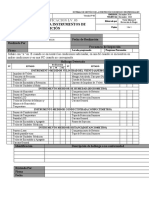
- LV-03 Lista Verificacion Instrumentos de MedicionDocumento1 páginaLV-03 Lista Verificacion Instrumentos de MedicionFabian FloresAún no hay calificaciones
- Calendario Manejo OvinoDocumento4 páginasCalendario Manejo OvinoDaniela Ocaña100% (2)
- ParetoDocumento7 páginasParetoRaymundo CelisAún no hay calificaciones
- Optimizacion Con Objetivos MultiplesDocumento20 páginasOptimizacion Con Objetivos MultiplessilvinaguillanAún no hay calificaciones
- Capitulo 2Documento83 páginasCapitulo 2JUAN4201Aún no hay calificaciones
- Optimizacion en Ingenieria Quimica (UDEC)Documento88 páginasOptimizacion en Ingenieria Quimica (UDEC)luisbmwm6Aún no hay calificaciones
- Cálculo Diferencial e Integral 1NV1-InES Dr. E. Choreño OrtizDocumento62 páginasCálculo Diferencial e Integral 1NV1-InES Dr. E. Choreño OrtizRivera Ibarra Luis GerardoAún no hay calificaciones
- Tema 6Documento15 páginasTema 6maropasAún no hay calificaciones
- Pec4Documento3 páginasPec4ce0906Aún no hay calificaciones
- Técnicas de Derivación de Funciones RacionalesDocumento11 páginasTécnicas de Derivación de Funciones RacionalesDouglas PinargoteAún no hay calificaciones
- Optimización (Matemática)Documento8 páginasOptimización (Matemática)Jhesi Bris MerloAún no hay calificaciones
- Introducción A Las Técnicas de OptimizaciónDocumento19 páginasIntroducción A Las Técnicas de OptimizaciónmvcaballeroAún no hay calificaciones
- Máximos y MínimosDocumento2 páginasMáximos y MínimosVicman Mogollon ChavezAún no hay calificaciones
- Aplicacion Derivadas Maximos y MinimosDocumento11 páginasAplicacion Derivadas Maximos y MinimosHugo Gabriel Ortega Vintimilla100% (1)
- Optimizacion en Ingenieria Quimica (Udec) PDFDocumento88 páginasOptimizacion en Ingenieria Quimica (Udec) PDFRaul TrujilloAún no hay calificaciones
- Unidad IiDocumento38 páginasUnidad IiKarly A.Aún no hay calificaciones
- Metodos Exactos de Optimizacion en Microeconomia CuasiconcavidadDocumento11 páginasMetodos Exactos de Optimizacion en Microeconomia CuasiconcavidadWashington Quintero MontañoAún no hay calificaciones
- Optimización Univariable (M)Documento12 páginasOptimización Univariable (M)Ervar Potro ChavezAún no hay calificaciones
- RESUMENDocumento35 páginasRESUMENSleyter LopezAún no hay calificaciones
- iNTRO A LA OPTIMIZACIÓN DE SISTEMASDocumento16 páginasiNTRO A LA OPTIMIZACIÓN DE SISTEMASmar milletAún no hay calificaciones
- Info.. Maximos - Minimos de Una FuncionDocumento20 páginasInfo.. Maximos - Minimos de Una FuncionAGUILAR OXOLON LIANE GERALDINE100% (1)
- Unidad 3 Programacion LinealDocumento14 páginasUnidad 3 Programacion LinealAlexis BeersAún no hay calificaciones
- Derive 1Documento6 páginasDerive 1mc_mvgaAún no hay calificaciones
- Funciones MatemáticasDocumento6 páginasFunciones MatemáticasJose Argenis Gutierrez BaronAún no hay calificaciones
- Informe 02 Jimenez Zurita MarielaDocumento21 páginasInforme 02 Jimenez Zurita MarielaMariela Jimenez ZuritaAún no hay calificaciones
- Uso de Gradiente Ef21Documento23 páginasUso de Gradiente Ef21Jorge Luis Hernandez VAún no hay calificaciones
- Faculta de Ciencias Económicas Escuela Profesional de EconomíaDocumento21 páginasFaculta de Ciencias Económicas Escuela Profesional de EconomíaMariela Jimenez ZuritaAún no hay calificaciones
- Funciones de Varias Variables IIDocumento13 páginasFunciones de Varias Variables IIAmIn20122Aún no hay calificaciones
- Tema 7Documento26 páginasTema 7tivhn95g5btbsrnbtq0Aún no hay calificaciones
- Actividad - 2 - 1 - Tovar Guerrero - Eliana - DeniseDocumento13 páginasActividad - 2 - 1 - Tovar Guerrero - Eliana - DeniseLauraCristinaEspitiaAún no hay calificaciones
- Moisés Villena Muñoz Cap. 2 Optimización de Varias VariablesDocumento26 páginasMoisés Villena Muñoz Cap. 2 Optimización de Varias Variablesb10287366100% (2)
- Guía Práctica Primera ParteDocumento68 páginasGuía Práctica Primera ParteBruno MaizaresAún no hay calificaciones
- Algebra Matricial TrabajoDocumento10 páginasAlgebra Matricial TrabajoDiego Alonso Nieves AbadAún no hay calificaciones
- TRABAJO de Prog No LinealDocumento11 páginasTRABAJO de Prog No LinealEnrique SanchezAún no hay calificaciones
- Cal CuloDocumento11 páginasCal CuloBrenda RamirezAún no hay calificaciones
- Problema 2 Punto FijoDocumento41 páginasProblema 2 Punto FijoViri YseyAún no hay calificaciones
- MAXIMOS Y MINIMOS (Recuperado Automáticamente)Documento18 páginasMAXIMOS Y MINIMOS (Recuperado Automáticamente)130049222Aún no hay calificaciones
- Analisis Matematico 2222Documento30 páginasAnalisis Matematico 2222Alex David Flores OscoAún no hay calificaciones
- Practica III PruebaDocumento3 páginasPractica III PruebaKristel Campos valerioAún no hay calificaciones
- Reyna IvoneDocumento10 páginasReyna IvoneReyna Ivone Rosas RosseteAún no hay calificaciones
- Manual U-V CALCULO DIFERENCIAL PDFDocumento14 páginasManual U-V CALCULO DIFERENCIAL PDFJose Manuel Romero ZamoraAún no hay calificaciones
- Funcion Racional III 2023. PrecálculoDocumento28 páginasFuncion Racional III 2023. PrecálculojojargAún no hay calificaciones
- Programacion LinealDocumento9 páginasProgramacion LinealLuisa Fernanda MezaAún no hay calificaciones
- Opt Estatica MapleDocumento14 páginasOpt Estatica MapleAlejandroHerreraGurideChileAún no hay calificaciones
- Programación LinealDocumento95 páginasProgramación LinealPilar PeffaureAún no hay calificaciones
- Tarea de Investigación - Programación Líneal - Grafíca y AnalíticaDocumento11 páginasTarea de Investigación - Programación Líneal - Grafíca y AnalíticaCatherine Nicole Torres MirandaAún no hay calificaciones
- Funciones Varias Variables IIDocumento16 páginasFunciones Varias Variables IIPepe LleidaAún no hay calificaciones
- TeoremasDocumento12 páginasTeoremasRuiz AdolfoAún no hay calificaciones
- U2A10Documento18 páginasU2A10Jazmín JazmiclaAún no hay calificaciones
- METODO GRAFICO y SIMPLEXDocumento13 páginasMETODO GRAFICO y SIMPLEXHyomin Arai100% (1)
- Fundamentos de Optimización LinealDocumento18 páginasFundamentos de Optimización Linealjmartin13Aún no hay calificaciones
- E5 - DerivadasDocumento17 páginasE5 - DerivadasdiegoAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- Juan 7 Elementos Que Ayudan A Creer y No CreerDocumento2 páginasJuan 7 Elementos Que Ayudan A Creer y No CreerDaniel ChukAún no hay calificaciones
- El ADN de Las RelacionesDocumento4 páginasEl ADN de Las RelacionesDaniel ChukAún no hay calificaciones
- Juan 17Documento9 páginasJuan 17Daniel ChukAún no hay calificaciones
- ALELONDocumento2 páginasALELONDaniel ChukAún no hay calificaciones
- José, Hombre de Corazón SanoDocumento3 páginasJosé, Hombre de Corazón SanoDaniel ChukAún no hay calificaciones
- El Reino de Dios Es Inconmovible - DulantoDocumento3 páginasEl Reino de Dios Es Inconmovible - DulantoDaniel Chuk100% (1)
- NatanaelDocumento3 páginasNatanaelDaniel ChukAún no hay calificaciones
- Un Discípulo Llamado AnaníasDocumento3 páginasUn Discípulo Llamado AnaníasDaniel Chuk100% (1)
- Jesús, Modelo Del Hombre LibreDocumento2 páginasJesús, Modelo Del Hombre LibreDaniel ChukAún no hay calificaciones
- La SencillezDocumento2 páginasLa SencillezDaniel Chuk0% (1)
- 1.el Caracter Del Obrero CristianoDocumento4 páginas1.el Caracter Del Obrero CristianoDaniel Chuk100% (1)
- Guía 6Documento9 páginasGuía 6Brigette AvilaAún no hay calificaciones
- V de Gowin 3practicaDocumento1 páginaV de Gowin 3practicaMaria Jose Olivero CarrascalAún no hay calificaciones
- 1trabajo Final SafDocumento295 páginas1trabajo Final SafYesicaOrdóñezAún no hay calificaciones
- MAUIDocumento27 páginasMAUIMarguii Piicon PerdomoAún no hay calificaciones
- Res DNCP 4366 23Documento23 páginasRes DNCP 4366 23alb_navAún no hay calificaciones
- Practica Dilatación 2020 Virtual 3 PDFDocumento2 páginasPractica Dilatación 2020 Virtual 3 PDFjosecab1996Aún no hay calificaciones
- Sitema Decimal MetricoDocumento5 páginasSitema Decimal MetricotottyAún no hay calificaciones
- Viento Rep 04Documento9 páginasViento Rep 04Carmen MosqueraAún no hay calificaciones
- Lista de Invitados DURBY 01Documento5 páginasLista de Invitados DURBY 01Angel Arturo Oxacopa GarciaAún no hay calificaciones
- ColorimetriaDocumento16 páginasColorimetriaDaniel MazariegosAún no hay calificaciones
- PRÁCTICA 1. Los Materiales Clasificacion y CaracteristicasDocumento13 páginasPRÁCTICA 1. Los Materiales Clasificacion y CaracteristicasAlejandro OrtegaAún no hay calificaciones
- Mi Identidad Como Docente (Ensayo)Documento5 páginasMi Identidad Como Docente (Ensayo)Angel JairAún no hay calificaciones
- Módulos Diplomado Salud Pública - Lic Eva Cruz EspinalDocumento9 páginasMódulos Diplomado Salud Pública - Lic Eva Cruz EspinalEvita CruzAún no hay calificaciones
- El Budín Esponjoso - Hebe UhartDocumento3 páginasEl Budín Esponjoso - Hebe UhartSebastian DíazAún no hay calificaciones
- Optometría - Ishihara y OftalmologíaDocumento5 páginasOptometría - Ishihara y OftalmologíajuniorcanasalvarezAún no hay calificaciones
- Material 13 EstrategiaDocumento5 páginasMaterial 13 EstrategiaJaime Mauricio Caceres LealAún no hay calificaciones
- PNLDocumento4 páginasPNLmigu3Lito0100% (1)
- Torch - PediatríaDocumento38 páginasTorch - Pediatría25pandaAún no hay calificaciones
- Poblacion Colombiana 8 Guia 2 SocialesDocumento3 páginasPoblacion Colombiana 8 Guia 2 Socialesdevanis cinchillaAún no hay calificaciones
- Los SacramentosDocumento1 páginaLos SacramentosDaniel Castellano100% (3)
- 63-0605 Uno Más Grande Que Salomón Está Aquí HubDocumento143 páginas63-0605 Uno Más Grande Que Salomón Está Aquí HubaguiluchoAún no hay calificaciones
- Sistemas OperativosDocumento2 páginasSistemas OperativosJesus Enrique Vazquez ReynaAún no hay calificaciones
- Cuadernillo para Repasar Las Figuras GeometricasDocumento18 páginasCuadernillo para Repasar Las Figuras GeometricasFabiola EscobarAún no hay calificaciones
- ᐅ Cómo CREAR un Blog en Blogger - →【Paso a Paso】Documento20 páginasᐅ Cómo CREAR un Blog en Blogger - →【Paso a Paso】Edwin E Pérez CarvajalAún no hay calificaciones
- Autorización A Persona Juridica para Vender Vehículo en ConsignaciónDocumento2 páginasAutorización A Persona Juridica para Vender Vehículo en ConsignaciónGerardo AmosAún no hay calificaciones
- Comprensión y Redacción de Textos II Ciclo 2023-Marzo Semana 1 El Correo Electrónico: Ejercicio de Transferencia Versión Borrador Apellidos y NombresDocumento3 páginasComprensión y Redacción de Textos II Ciclo 2023-Marzo Semana 1 El Correo Electrónico: Ejercicio de Transferencia Versión Borrador Apellidos y NombresAlexAún no hay calificaciones
- Metodologia de La Investigacion - Roberto Hernandez SampieriDocumento269 páginasMetodologia de La Investigacion - Roberto Hernandez SampieriBiblioDigitalDerecho100% (3)