También podría gustarte
- Sincronizacion y Paralelismo de Generadores Turbomotores EcuatorianosDocumento317 páginasSincronizacion y Paralelismo de Generadores Turbomotores EcuatorianosLenin Macas Blacio100% (3)
- 4.1 - Principio de Operación de La Protección Diferencial de Línea 87LDocumento7 páginas4.1 - Principio de Operación de La Protección Diferencial de Línea 87LAntonio Adrian Martinez100% (5)
- PCC1301 - Manual Del OperadorDocumento94 páginasPCC1301 - Manual Del OperadorRoberth Abarca100% (2)
- Avr MX321 enDocumento44 páginasAvr MX321 enPorfirioOteroPeralta100% (2)
- Manual Sel 375 Español PDFDocumento724 páginasManual Sel 375 Español PDFromeo1975couto100% (2)
- Ejercicios SEPDocumento40 páginasEjercicios SEPANDRES MONTALUISA100% (1)
- Control Isócrono Vs Regulado para GeneradoresDocumento5 páginasControl Isócrono Vs Regulado para GeneradoresMijail David Felix Narvaez100% (1)
- Funcionamiento Del Gobernador 2301aDocumento16 páginasFuncionamiento Del Gobernador 2301apablo santiago arza ferrufino100% (1)
- Mapa Isoceráunico de Guatemala - JaguilarDocumento15 páginasMapa Isoceráunico de Guatemala - JaguilarJorge Aguilar50% (2)
- Manual de Servicio y MantenimientoDocumento639 páginasManual de Servicio y MantenimientoMario Martinez100% (2)
- Capitulo 2. Gobernador de Velocidad. SISTEMAS DE POTENCIAS IIDocumento22 páginasCapitulo 2. Gobernador de Velocidad. SISTEMAS DE POTENCIAS IICarlos M. Rojas R91% (33)
- CONTROL DROOP DefinicionesDocumento2 páginasCONTROL DROOP DefinicionesErika Muñoz100% (1)
- Proteccion Contra Perdida de SincronismoDocumento8 páginasProteccion Contra Perdida de SincronismoCristopher SalazarAún no hay calificaciones
- Clase de Precisión de Los Transformadores de Potencia y Corriente Según La Norma ANSI y IECDocumento4 páginasClase de Precisión de Los Transformadores de Potencia y Corriente Según La Norma ANSI y IECMauricio LlanoAún no hay calificaciones
- Manual de Operador y Mantto. FG WilsonDocumento60 páginasManual de Operador y Mantto. FG WilsonMiguel Angel Pavon Carbonell50% (2)
- Traduccion Del VR6Documento22 páginasTraduccion Del VR6pedroboccarotto100% (2)
- 1.3 Factor de Carga Demanda DiversidadDocumento7 páginas1.3 Factor de Carga Demanda DiversidadAnonymous dQVcMQ855WAún no hay calificaciones
- Libro Motores Diesel Generadores PDFDocumento112 páginasLibro Motores Diesel Generadores PDFChristian Rodriguez100% (1)
- Protección Direccional 67NDocumento9 páginasProtección Direccional 67Nfer8844100% (4)
- Tipos de Sistemas de Regulacion de Velocidad en GeneradoresDocumento12 páginasTipos de Sistemas de Regulacion de Velocidad en GeneradoresOscar Vélez BoneAún no hay calificaciones
- Tableros de Tranferencia FG Wilson CTI ATIDocumento5 páginasTableros de Tranferencia FG Wilson CTI ATIVENTAS AGROPOCULONAún no hay calificaciones
- Coordinación de Aislamiento en Lineas de TransmisionDocumento46 páginasCoordinación de Aislamiento en Lineas de TransmisionZiur Betún75% (4)
- Pruebas de Campo Pararrayos PDFDocumento50 páginasPruebas de Campo Pararrayos PDFSoilWoRkeR100% (1)
- Manual Transferencias Asco EspañolDocumento32 páginasManual Transferencias Asco Españolbetor_280% (2)
- Teorema de FortescueDocumento43 páginasTeorema de Fortescuemmec21100% (5)
- Conceptos Protecciones de Potencia Inversa en GerneradoresDocumento8 páginasConceptos Protecciones de Potencia Inversa en GerneradoresDawn Hernandez100% (1)
- Procedimiento para El Cálculo de Líneas de TransmisiónDocumento32 páginasProcedimiento para El Cálculo de Líneas de TransmisiónMiguel Pallares0% (1)
- Secuencia Positiva Negativa Ya Cero TeoriaDocumento32 páginasSecuencia Positiva Negativa Ya Cero TeoriaAntonio100% (2)
- Mantenimiento en Seccionadores y Sus RiesgosDocumento9 páginasMantenimiento en Seccionadores y Sus RiesgosRicardoSanchez100% (1)
- Generador Sincrono Trabajando en Carga BaseDocumento6 páginasGenerador Sincrono Trabajando en Carga BaseGuillermo Catter Farro100% (3)
- Modos de Operación y Su FuncionamientoDocumento3 páginasModos de Operación y Su Funcionamientomarco vAún no hay calificaciones
- Grupo 8 - REPARTICIÓN DE CARGA ENTRE ALTERNADORES EN PARALELODocumento29 páginasGrupo 8 - REPARTICIÓN DE CARGA ENTRE ALTERNADORES EN PARALELOFabricio BC0% (1)
- Arranque en NegroDocumento2 páginasArranque en NegroLuis Eloy Mamani Sancho100% (1)
- Lista de RelesDocumento5 páginasLista de RelesLuis RobertoAún no hay calificaciones
- Tabla 430-152Documento1 páginaTabla 430-152Carlos LopezAún no hay calificaciones
- Principios Básicos de Los Motores de Corriente Alterna FESTODocumento44 páginasPrincipios Básicos de Los Motores de Corriente Alterna FESTOChama Kbre0% (1)
- Puesta A Tierra de Instalaciones EléctricasDocumento127 páginasPuesta A Tierra de Instalaciones EléctricasCaren Katerina MundarainAún no hay calificaciones
- Black Start o Arranque NegroDocumento2 páginasBlack Start o Arranque NegroShiroe Shirogane100% (3)
- Instrucciones de Instalación y Funcionamiento F6 PDFDocumento48 páginasInstrucciones de Instalación y Funcionamiento F6 PDFHislim SaidAún no hay calificaciones
- Manuel Arias Maldonado - Antropoceno. La Política en La Era Humana (2018, Taurus) - Libgen - LiDocumento82 páginasManuel Arias Maldonado - Antropoceno. La Política en La Era Humana (2018, Taurus) - Libgen - Lisergio arredondo100% (1)
- Sobre Escenarios de Operación y Variaciones en DigsilentDocumento3 páginasSobre Escenarios de Operación y Variaciones en Digsilentjdjjarami100% (1)
- Ttransferencia MT RacomDocumento30 páginasTtransferencia MT Racomcruzanti100% (2)
- Informe de Lab de Amplificador Inversor y No InversorDocumento10 páginasInforme de Lab de Amplificador Inversor y No InversorDavid Ajhuacho Inca100% (2)
- Capitulo 3 Calculo de AlimentadoresDocumento30 páginasCapitulo 3 Calculo de AlimentadoresMel Moon100% (1)
- Reparto de Carga Entre Generadores en ParaleloDocumento5 páginasReparto de Carga Entre Generadores en ParaleloEduardo SolanoAún no hay calificaciones
- 03 Ejercicios Proteccion Distancia SDocumento3 páginas03 Ejercicios Proteccion Distancia Skardra75% (4)
- Convertidor Reductor-Elevador (Buck-Boost)Documento4 páginasConvertidor Reductor-Elevador (Buck-Boost)mipapadonmarioAún no hay calificaciones
- Transformadores DefasadoresDocumento3 páginasTransformadores DefasadoresLuis Alfonso Soberanis Novelo75% (4)
- SFRA en Rotores - LAPEM - AJACDocumento4 páginasSFRA en Rotores - LAPEM - AJACIrving Javier Leal OrtizAún no hay calificaciones
- Curvas de Cargabilidad de La Linea de TransmisiónDocumento5 páginasCurvas de Cargabilidad de La Linea de TransmisiónRogger CriolloAún no hay calificaciones
- Curso Plataforma Siemens PERU 1Documento4 páginasCurso Plataforma Siemens PERU 1Edwar SamanezAún no hay calificaciones
- Interruptores de PotenciaDocumento17 páginasInterruptores de PotenciaLuix Ha100% (2)
- Historia Del Sector Eléctrico en El PerúDocumento24 páginasHistoria Del Sector Eléctrico en El PerúMelvin Veliz VelasquezAún no hay calificaciones
- 2 - Proteccion de SobrecorrienteDocumento75 páginas2 - Proteccion de SobrecorrienteJulio A. Ortiz MendozaAún no hay calificaciones
- Ejercicios Power WorldDocumento7 páginasEjercicios Power Worldchristianc32100% (2)
- Protecciones 59-27Documento39 páginasProtecciones 59-27Dave RobetAún no hay calificaciones
- Sobretensiones de ManiobraDocumento5 páginasSobretensiones de ManiobrayanmelihahAún no hay calificaciones
- Tarea 6 SensoresDocumento14 páginasTarea 6 SensoresHiram WolfAún no hay calificaciones
- Fallas e Impedancias de SecuenciasDocumento35 páginasFallas e Impedancias de SecuenciasFelipeZapanaFloresAún no hay calificaciones
- Rele de Potencia InversaDocumento3 páginasRele de Potencia InversaGonzalo Machicado100% (1)
- Análisis de Voltaje de Flameo Crítico (CFO) A Estructuras Del Estándar 66-E-2001 para La Construcción de Líneas Aéreas de El Salvador PDFDocumento138 páginasAnálisis de Voltaje de Flameo Crítico (CFO) A Estructuras Del Estándar 66-E-2001 para La Construcción de Líneas Aéreas de El Salvador PDFfranciscoAún no hay calificaciones
- IsócronoDocumento3 páginasIsócronomorihno100% (1)
- Guia de Sincronia 31.07.2018Documento13 páginasGuia de Sincronia 31.07.2018Kevin Herrera Murgas100% (2)
- Paralelo de GeneradoresDocumento5 páginasParalelo de GeneradoresCristian Vázquez Novillo100% (1)
- Generadores Síncronos en Paralelo Tarea MaquinasDocumento7 páginasGeneradores Síncronos en Paralelo Tarea MaquinasluismiguelonxAún no hay calificaciones
- Regulador de Velocidad en Turbinas HidraulicasDocumento11 páginasRegulador de Velocidad en Turbinas HidraulicasMiguel CVAún no hay calificaciones
- Ia Caterpillar Specifications 3304 VehicularEngine TextDocumento12 páginasIa Caterpillar Specifications 3304 VehicularEngine TextJuan CarlosAún no hay calificaciones
- Tablero de Transf 402Documento7 páginasTablero de Transf 402Percy Rios Alan0% (1)
- Dse 8610 MkiiDocumento8 páginasDse 8610 Mkiioperaciones1 sesaAún no hay calificaciones
- Sentencias tc-0362-22-8 Relativo A La Acción Directa de Inconstitucionalidad Interpuesta Por Fernando E. Santos Bucarelly Contra Las ResolucionesDocumento76 páginasSentencias tc-0362-22-8 Relativo A La Acción Directa de Inconstitucionalidad Interpuesta Por Fernando E. Santos Bucarelly Contra Las ResolucionesOAún no hay calificaciones
- Circuitos Digitales Flip FlopDocumento13 páginasCircuitos Digitales Flip FlopCorimayo MaximilianoAún no hay calificaciones
- A - Lab1 - Símbolos ElectrotecniosDocumento6 páginasA - Lab1 - Símbolos ElectrotecniosSergio Alexander Humpire FloresAún no hay calificaciones
- Técnica SDocumento9 páginasTécnica SKatia AlonzoAún no hay calificaciones
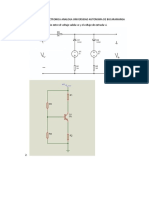
- Segundo Parcial Electronica Analoga Universidad Autonoma de BucaramangaDocumento2 páginasSegundo Parcial Electronica Analoga Universidad Autonoma de Bucaramangahermes robiel lipesAún no hay calificaciones
- HYW-45-T5 Data-SheetDocumento6 páginasHYW-45-T5 Data-Sheetdavid ignacioAún no hay calificaciones
- Sensor Óptico de Barrera Por Reflexión MLV12-54/76b/124/128: DimensionesDocumento6 páginasSensor Óptico de Barrera Por Reflexión MLV12-54/76b/124/128: DimensionesDavid ReyesAún no hay calificaciones
- Informe de Laboratorio de Circuitos Analógicos DigitalesDocumento4 páginasInforme de Laboratorio de Circuitos Analógicos Digitalesdiogns100% (1)
- Listado de Repuestos para Overahul de Incinerador AntiguoDocumento3 páginasListado de Repuestos para Overahul de Incinerador Antiguofrancklin linden aliaga beraunAún no hay calificaciones
- RTTema 4Documento10 páginasRTTema 4mario valenzuelaAún no hay calificaciones
- 2do. Problemario ElctromagnetismoDocumento35 páginas2do. Problemario ElctromagnetismoFerAún no hay calificaciones
- Caso PrácticoDocumento8 páginasCaso PrácticoAndrés TAAún no hay calificaciones
- Seguidor de LuzDocumento11 páginasSeguidor de LuzAlex Jimenez0% (1)
- Principios Básicos de Electricidad AutomotrizDocumento21 páginasPrincipios Básicos de Electricidad AutomotrizWilson MoralesAún no hay calificaciones
- Introducción A EA y EDDocumento15 páginasIntroducción A EA y EDMary Nájera GómezAún no hay calificaciones
- Definición de La Lógica de Operación Del Esquema de Separación de Áreas en La S/E Pimampiro 230 KVDocumento11 páginasDefinición de La Lógica de Operación Del Esquema de Separación de Áreas en La S/E Pimampiro 230 KVJose Gabriel Aguirre AndradeAún no hay calificaciones
- Presupuesto MO (Diana Aponte) Sede-ClubDocumento1 páginaPresupuesto MO (Diana Aponte) Sede-ClubRONALD BENAVIDES ORELLANAAún no hay calificaciones
- Curriculo Alex JulcaDocumento4 páginasCurriculo Alex JulcajalexivanAún no hay calificaciones
- Memoria Descriptiva ElectricasDocumento11 páginasMemoria Descriptiva Electricasrj_gato0343921Aún no hay calificaciones
- Armonicos Triplens Del ForoDocumento3 páginasArmonicos Triplens Del Fororafins76Aún no hay calificaciones