También podría gustarte
- Apuntes Electro 2Documento18 páginasApuntes Electro 2Daniel CalderonAún no hay calificaciones
- Exam 1 DioDocumento5 páginasExam 1 DioLuis E. MamaniAún no hay calificaciones
- Solucion Ayudantia 2 Calculo 3Documento5 páginasSolucion Ayudantia 2 Calculo 3Benjamín GonzálezAún no hay calificaciones
- La Transversalidad de Los Campos de Radiación Mediante Las Ecuaciones de JefimenkoDocumento3 páginasLa Transversalidad de Los Campos de Radiación Mediante Las Ecuaciones de JefimenkoAtzin LópezAún no hay calificaciones
- 39Documento2 páginas39Hitler Alado VásquezAún no hay calificaciones
- Integrales Dobles en PolaresDocumento6 páginasIntegrales Dobles en PolaresLópez León Leonardo CamiloAún no hay calificaciones
- Flujo en Tuberias Capitulo 8Documento117 páginasFlujo en Tuberias Capitulo 8Javier Vinicio Yupangui GuanucheAún no hay calificaciones
- Flujo en Tuberias Capitulo 8Documento129 páginasFlujo en Tuberias Capitulo 8Edilzon David PinzonAún no hay calificaciones
- Mecánica Cuántica - Partícula Confinada A Un Cilindro.Documento9 páginasMecánica Cuántica - Partícula Confinada A Un Cilindro.Martín NavaAún no hay calificaciones
- Trabajo Fisca MatemaDocumento15 páginasTrabajo Fisca MatemaJuan Carlos TrujilloAún no hay calificaciones
- Act7 Calc IVDocumento1 páginaAct7 Calc IVNicolas Celedon HernandezAún no hay calificaciones
- Formulario F1Documento1 páginaFormulario F1Sussan PazAún no hay calificaciones
- 2 Integrales Mult Semana 8 BDocumento24 páginas2 Integrales Mult Semana 8 BFranklin Avilez SedanoAún no hay calificaciones
- Componentes Radial y TransversalDocumento3 páginasComponentes Radial y TransversalRaquelPolaniaAún no hay calificaciones
- Integrales de LíneaDocumento4 páginasIntegrales de Líneafjnarea100% (1)
- CV Tarea1 Sol Anexo-1Documento29 páginasCV Tarea1 Sol Anexo-1Andrés Ricardo Aldana SaavedraAún no hay calificaciones
- Capitulo 5-Ejercicio 5.2Documento1 páginaCapitulo 5-Ejercicio 5.2FRANCO RICARDO GUERRON QUIROZAún no hay calificaciones
- Fisica 100 Aux Cinematica de La ParticulaDocumento2 páginasFisica 100 Aux Cinematica de La ParticulaEduardo Manuel Saavedra LizarazúAún no hay calificaciones
- Funciones Residuales MODELOSDocumento3 páginasFunciones Residuales MODELOSMarceloEchegarayAún no hay calificaciones
- Calcule El Volumen Del Solido Que Se Encuentra Dentro de La Esfera x2Documento3 páginasCalcule El Volumen Del Solido Que Se Encuentra Dentro de La Esfera x2Samir HuarinoAún no hay calificaciones
- 2-Ecuaciones Generales de Transferencia de CalorDocumento2 páginas2-Ecuaciones Generales de Transferencia de Caloralara-731450Aún no hay calificaciones
- Ejercicios ElectromagnetismoDocumento6 páginasEjercicios ElectromagnetismoChristian MoralesAún no hay calificaciones
- Ayudantia 2 Calculo 3Documento1 páginaAyudantia 2 Calculo 3Benjamín GonzálezAún no hay calificaciones
- Problema 2 Tarea Fenomenos de TransporteDocumento9 páginasProblema 2 Tarea Fenomenos de TransportefelipeAún no hay calificaciones
- Solucionario de La Segunda PC Mate VDocumento10 páginasSolucionario de La Segunda PC Mate VKarlos QuiquiaAún no hay calificaciones
- Taller 04Documento11 páginasTaller 04Julio Ricardo Garcia CuestaAún no hay calificaciones
- Problema Nº14 Bce MicroscopicoDocumento4 páginasProblema Nº14 Bce MicroscopicoSilvina ToffoloAún no hay calificaciones
- Tema 2 Cinematica de La Particula 20180303 PDFDocumento24 páginasTema 2 Cinematica de La Particula 20180303 PDFJosé ChavarriaAún no hay calificaciones
- tp4b 11c, 13a, 15a, 18, 26b, 32Documento4 páginastp4b 11c, 13a, 15a, 18, 26b, 32trabazotelmoAún no hay calificaciones
- Aplicacion Del Terorema de GreenDocumento3 páginasAplicacion Del Terorema de GreenStevez100% (1)
- Acerca de La Fórmula de Feynman - Heaviside para Los Campos Electromagnéticos de Una Carga Puntual en Movimiento ArbitrarioDocumento16 páginasAcerca de La Fórmula de Feynman - Heaviside para Los Campos Electromagnéticos de Una Carga Puntual en Movimiento ArbitrarioMarvin AscencioAún no hay calificaciones
- Semana 02 Cinematica Dinamica BiomecanicaDocumento31 páginasSemana 02 Cinematica Dinamica Biomecanicaalex canoAún no hay calificaciones
- Ayudantia 1 ElectroDocumento12 páginasAyudantia 1 ElectroValentina EspinozaAún no hay calificaciones
- Fuerza Ampère Grassmann LorentzDocumento42 páginasFuerza Ampère Grassmann LorentzIsrael ArancibiaAún no hay calificaciones
- FormularioDocumento6 páginasFormularioGuillermo Martínez RamónAún no hay calificaciones
- ElectromagnetismoDocumento4 páginasElectromagnetismoPatricio Alvarado100% (1)
- Tarea 2 TEMDocumento5 páginasTarea 2 TEMAngel ArielAún no hay calificaciones
- LigadurasDocumento3 páginasLigadurasRousse AldavaAún no hay calificaciones
- Metrica de SchwarzschildDocumento14 páginasMetrica de SchwarzschildJuan Jose Chavelas TrejoAún no hay calificaciones
- Pregunta 8Documento4 páginasPregunta 8Eros TapiaAún no hay calificaciones
- Conducción Del Calor en Una Esfera HomogéneaDocumento7 páginasConducción Del Calor en Una Esfera HomogéneaDanilo AltamiranoAún no hay calificaciones
- Ejercicos Resueltos de Teorema de GreenDocumento1 páginaEjercicos Resueltos de Teorema de Greenluis zamoraAún no hay calificaciones
- Cuantica PDFDocumento7 páginasCuantica PDFIsaac MartinezAún no hay calificaciones
- S08 - s2 CAMBIO A POLARESDocumento6 páginasS08 - s2 CAMBIO A POLARESdervinAún no hay calificaciones
- Ed Clase1Documento100 páginasEd Clase1Nestor Rodrigo Ahumada AhumadaAún no hay calificaciones
- 2do Parcial Modelo 1 ResueltoDocumento4 páginas2do Parcial Modelo 1 ResueltoNicolas E. JerezAún no hay calificaciones
- Formulario y Constantes Físicas PDFDocumento2 páginasFormulario y Constantes Físicas PDFCarlos MaciasAún no hay calificaciones
- Componentes PolaresDocumento2 páginasComponentes Polaresjmgg5808Aún no hay calificaciones
- FS-2211 Clase 5 - Campo EléctricoDocumento3 páginasFS-2211 Clase 5 - Campo EléctricoandresgAún no hay calificaciones
- Flujo de Poiseuille de Un Líquido No Newtoniano Generalizado de EllisDocumento9 páginasFlujo de Poiseuille de Un Líquido No Newtoniano Generalizado de EllisrobertAún no hay calificaciones
- ClasesolschwDocumento49 páginasClasesolschwPamela Catalán ContrerasAún no hay calificaciones
- Formulario ElectromagnetismoDocumento3 páginasFormulario ElectromagnetismoM Irene HespiAún no hay calificaciones
- Formulario FluidosDocumento2 páginasFormulario FluidosfarabraAún no hay calificaciones
- EjerciciosDocumento18 páginasEjerciciosJUAN CARLOS PALOMINO ZUÑIGAAún no hay calificaciones
- Ejercicios Proyecto CalculoDocumento3 páginasEjercicios Proyecto CalculoEduardo Muñoz MantillaAún no hay calificaciones
- Ampliacion Julio 1718Documento6 páginasAmpliacion Julio 1718Caridad MercaderAún no hay calificaciones
- Tarea 3 ElectroDocumento5 páginasTarea 3 ElectroErick AguileraAún no hay calificaciones
- Cap. 8 Convección Forzada Flujo Interno (2013)Documento10 páginasCap. 8 Convección Forzada Flujo Interno (2013)Rolando Alborno MoraAún no hay calificaciones
- 02clases - Normativa PtaDocumento14 páginas02clases - Normativa PtaValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Ayudantía Dinámica de Estructuras PDFDocumento1 páginaAyudantía Dinámica de Estructuras PDFValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Guía 1-2020 - DinámicaDocumento7 páginasGuía 1-2020 - DinámicaValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Ingenieria Sanitaria A4 Capitulo 06 Tratamiento de AguasDocumento123 páginasIngenieria Sanitaria A4 Capitulo 06 Tratamiento de AguasJoel MamaniAún no hay calificaciones
- Ayudantía Dinámica de Estructuras PDFDocumento1 páginaAyudantía Dinámica de Estructuras PDFValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Examenes MaquinasDocumento24 páginasExamenes MaquinasCristian Riola CamposAún no hay calificaciones
- Libro1 de AguasDocumento5 páginasLibro1 de AguasValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Cursoci 42 GDocumento45 páginasCursoci 42 GValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Slake TestDocumento5 páginasSlake TestValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Slake TestDocumento5 páginasSlake TestValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Precipitaciones Máximas Anuales en 24 Horas 23 - 09 - 2019 08 - 25Documento7 páginasPrecipitaciones Máximas Anuales en 24 Horas 23 - 09 - 2019 08 - 25Valentin Samueel Troncoso VerdugoAún no hay calificaciones
- Resumen Parametros Sondeo 2Documento42 páginasResumen Parametros Sondeo 2Valentin Samueel Troncoso VerdugoAún no hay calificaciones
- Manual de CalculoDocumento136 páginasManual de CalculoJoachim Zora100% (1)
- Mapa Geologico de San Antonio PDFDocumento1 páginaMapa Geologico de San Antonio PDFValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Word de ReferenciasDocumento2 páginasWord de ReferenciasValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Dominio de La FrecuenciaDocumento15 páginasDominio de La FrecuenciaRoy Vivanco RiosAún no hay calificaciones
- EscorrentíaaDocumento130 páginasEscorrentíaaValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Hormigón V0Documento11 páginasHormigón V0Valentin Samueel Troncoso VerdugoAún no hay calificaciones
- Metodos NumericosDocumento22 páginasMetodos Numericosrobinson RAún no hay calificaciones
- Cuenca Río Nilahue - Presentacion 1Documento11 páginasCuenca Río Nilahue - Presentacion 1Valentin Samueel Troncoso VerdugoAún no hay calificaciones
- Slake TestDocumento5 páginasSlake TestValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Dominio de La FrecuenciaDocumento15 páginasDominio de La FrecuenciaRoy Vivanco RiosAún no hay calificaciones
- Dominio de La FrecuenciaDocumento15 páginasDominio de La FrecuenciaRoy Vivanco RiosAún no hay calificaciones
- Mecanica de Suelos I ESLAGE (28!29!30)Documento56 páginasMecanica de Suelos I ESLAGE (28!29!30)mmmaaarrrAún no hay calificaciones
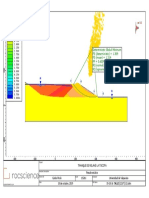
- Analisis Pseudo-Estático Situacción 21.8Documento1 páginaAnalisis Pseudo-Estático Situacción 21.8Valentin Samueel Troncoso VerdugoAún no hay calificaciones
- Dominio de La FrecuenciaDocumento15 páginasDominio de La FrecuenciaRoy Vivanco RiosAún no hay calificaciones
- DOCDEVORADocumento1 páginaDOCDEVORAValentin Samueel Troncoso VerdugoAún no hay calificaciones
- Lab 5 - Analisis Granulometrico y Limites de AtterbergDocumento8 páginasLab 5 - Analisis Granulometrico y Limites de AtterbergKetsmy DesrosiersAún no hay calificaciones
- Rs 2Documento55 páginasRs 2Valentin Samueel Troncoso VerdugoAún no hay calificaciones
- Fotos para Informe 1Documento2 páginasFotos para Informe 1Valentin Samueel Troncoso VerdugoAún no hay calificaciones