También podría gustarte
- Examen Parcial 01 Hidro C1 2023 IDocumento3 páginasExamen Parcial 01 Hidro C1 2023 IAngel Ramírez chujutalliAún no hay calificaciones
- MAT32Documento18 páginasMAT32Renzo Xavier Chavez HurtadoAún no hay calificaciones
- 7ma Semana - Estatica - ADC - 3Documento15 páginas7ma Semana - Estatica - ADC - 3Luis Armando Delgado CastroAún no hay calificaciones
- Propiedades GeometricasDocumento47 páginasPropiedades GeometricasHugo EzequielAún no hay calificaciones
- Metodo de La Flexibilidad Clase 12Documento14 páginasMetodo de La Flexibilidad Clase 12Jhonatan David JhoahAún no hay calificaciones
- Resistencia A La FlexionDocumento5 páginasResistencia A La FlexionJeyserCenturionJimenezAún no hay calificaciones
- 6 Determine Ix e Iy de La Figura SiguienteDocumento2 páginas6 Determine Ix e Iy de La Figura SiguienteLuis SilvaAún no hay calificaciones
- Resumen Capitulo 3 ChopraDocumento12 páginasResumen Capitulo 3 ChopraDiego Coronel MartinezAún no hay calificaciones
- Ejercicios PrecipitaciónDocumento13 páginasEjercicios Precipitaciónraul diego pereira berriosAún no hay calificaciones
- TALLER 2 - Mec - Fluidos - 2020-IDocumento3 páginasTALLER 2 - Mec - Fluidos - 2020-Itatioca02Aún no hay calificaciones
- Deterioro Del Concreto en Zonas CosterasDocumento4 páginasDeterioro Del Concreto en Zonas CosterasEnrique Luis Cotes100% (1)
- Espectro de Diseo y Espectro de RespuestaDocumento17 páginasEspectro de Diseo y Espectro de RespuestaRaul Robledo AlvaradoAún no hay calificaciones
- Práctica 7 - ConsolidaciónDocumento8 páginasPráctica 7 - ConsolidaciónRoberto HernándezAún no hay calificaciones
- Hidraulica de CanalesDocumento48 páginasHidraulica de Canalesuriel arcos vazquezAún no hay calificaciones
- Investigacion Tipos de Aligeramientos en OcañaDocumento61 páginasInvestigacion Tipos de Aligeramientos en OcañaJuanAún no hay calificaciones
- 3 - HORMIGONES-SUMERGIDOS pdf1202842123 PDFDocumento68 páginas3 - HORMIGONES-SUMERGIDOS pdf1202842123 PDFFranklin UmaquingaAún no hay calificaciones
- Reporte de ConsolidaciónDocumento7 páginasReporte de ConsolidaciónAngel FloresAún no hay calificaciones
- Método de CrossDocumento4 páginasMétodo de CrossArturoBaldéonAún no hay calificaciones
- Extraccion de Suelo AlteradoDocumento5 páginasExtraccion de Suelo AlteradoDayana Moreno BarrigaAún no hay calificaciones
- Hipótesis Básicas Según El ACIDocumento1 páginaHipótesis Básicas Según El ACIBuddy PereiraAún no hay calificaciones
- 6 Deflexion en Vigas - Casos HiperestaticosDocumento24 páginas6 Deflexion en Vigas - Casos HiperestaticosBenjamin OsccoAún no hay calificaciones
- Tarea de La Unidad 3Documento6 páginasTarea de La Unidad 3AdalGMAún no hay calificaciones
- Informe de GranulometricoDocumento23 páginasInforme de GranulometricoEdy DiazAún no hay calificaciones
- MATERIAL DE AZOLVE Filiberto Mejia Escobar 5DDocumento2 páginasMATERIAL DE AZOLVE Filiberto Mejia Escobar 5DMejía Escobar FilibertoAún no hay calificaciones
- Solucion Indicial MATLABDocumento4 páginasSolucion Indicial MATLABCamilo OrmenoAún no hay calificaciones
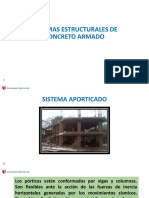
- Sesion 11 - (Estructuras Aporticadas)Documento49 páginasSesion 11 - (Estructuras Aporticadas)STERVER DARKSOAún no hay calificaciones
- Laboratorio 1 GuiaDocumento21 páginasLaboratorio 1 GuiaJefferson Coronado Neyra100% (1)
- Metodo de RigidezDocumento21 páginasMetodo de RigidezMoises Garcia DurandAún no hay calificaciones
- 03.01. Clase 03-Principios Básicos de DiseñoDocumento17 páginas03.01. Clase 03-Principios Básicos de DiseñoFlavio Cesar UQAún no hay calificaciones
- Metodo de La Fuerza Tractiva - Fluidos 2Documento3 páginasMetodo de La Fuerza Tractiva - Fluidos 2Dirceu RsiAún no hay calificaciones
- Libro Del Metodo MatricialDocumento151 páginasLibro Del Metodo MatricialJEISON MEDINA100% (1)
- Tema VII - Drenaje de Carreteras PDFDocumento58 páginasTema VII - Drenaje de Carreteras PDFStarlin Collado CastañoAún no hay calificaciones
- Laboratorio 03Documento14 páginasLaboratorio 03Enrique Ponce Mayorga100% (1)
- 7 Metodo de La Carga Unitaria o de Trabajo Virtual y Ejemplos PDFDocumento12 páginas7 Metodo de La Carga Unitaria o de Trabajo Virtual y Ejemplos PDFJhon Anderson Camacho Rodriguez100% (2)
- Analisis Estadistico SeguridadDocumento15 páginasAnalisis Estadistico SeguridadJ Andre Medina DiazAún no hay calificaciones
- Cat Vigas y Tableros Es 06c046esmDocumento8 páginasCat Vigas y Tableros Es 06c046esmJuan Carlos Jara MAún no hay calificaciones
- Sismo Tarea EscalaDocumento30 páginasSismo Tarea EscalaLexterLakzazs100% (1)
- 3 Parámetros de Diseño RasanteDocumento3 páginas3 Parámetros de Diseño RasanteDaniel Doria DoriaAún no hay calificaciones
- Metodo Simplificado Del Aci, para Determinar Momentos y Cortante en Losas en Una Direccion y Vigas ContinuasDocumento7 páginasMetodo Simplificado Del Aci, para Determinar Momentos y Cortante en Losas en Una Direccion y Vigas ContinuasWenddy Rivera AguirreAún no hay calificaciones
- Resistencia de Los MaterialesDocumento12 páginasResistencia de Los MaterialesElianaAún no hay calificaciones
- Leccion II Parcial Revisión Del IntentoDocumento4 páginasLeccion II Parcial Revisión Del IntentoDanny OrtegaAún no hay calificaciones
- Resueltos U3 PDFDocumento9 páginasResueltos U3 PDFJoseSantizAún no hay calificaciones
- Metodo de NewmarkDocumento15 páginasMetodo de NewmarkNelson PalacioAún no hay calificaciones
- Libro de Mecanica de FluidosDocumento138 páginasLibro de Mecanica de FluidosDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Cuestionario 1 HCDocumento2 páginasCuestionario 1 HCRicardo GarzaAún no hay calificaciones
- Universidad Autonoma de Chiapas: Facultad de Ingenieria Civil Campus IDocumento10 páginasUniversidad Autonoma de Chiapas: Facultad de Ingenieria Civil Campus IPedro Orlando Hernandez Trejo100% (1)
- Cimentación y GeotecniaDocumento4 páginasCimentación y GeotecniaVictor AguirreAún no hay calificaciones
- Aspectos A Considerar en Una Cimentacio1Documento21 páginasAspectos A Considerar en Una Cimentacio1Monica Fernanda Rojas CelisAún no hay calificaciones
- Coeficiente de Gasto para Vertedores RectangularesDocumento2 páginasCoeficiente de Gasto para Vertedores RectangularesMael D. J Corrales BarbaAún no hay calificaciones
- Capitulo I - Problemas de Los Suelos en La Ingenieria Civil PDFDocumento40 páginasCapitulo I - Problemas de Los Suelos en La Ingenieria Civil PDFLuis Angel Hallasi MamaniAún no hay calificaciones
- Ec. de Primer Grado Primer Orden-1-1Documento8 páginasEc. de Primer Grado Primer Orden-1-1Jhon Kevin Canaviri MamaniAún no hay calificaciones
- Tema 1-Parte 2Documento10 páginasTema 1-Parte 2Isaias Isac BarreroAún no hay calificaciones
- Apuntes Transformaciones Lineales Aldo Jimenez ArteagaDocumento41 páginasApuntes Transformaciones Lineales Aldo Jimenez ArteagaDaniel SegoviaAún no hay calificaciones
- Sistemas de Primer ÓrdenDocumento22 páginasSistemas de Primer ÓrdenJose Luis TrujilloAún no hay calificaciones
- Ejercicio 3 Lab Dinámica y VibracionesDocumento9 páginasEjercicio 3 Lab Dinámica y VibracionesBekiita Alexa SeguraAún no hay calificaciones
- MAS. ResorteDocumento10 páginasMAS. ResorteLuis BonetAún no hay calificaciones
- Presentación Maestria SCZ VIDocumento68 páginasPresentación Maestria SCZ VIAdnulfoAún no hay calificaciones
- 12 Programacion DinamicaDocumento45 páginas12 Programacion DinamicaJoseph InsilAún no hay calificaciones
- Ranking de Ventas Por Año PDFDocumento4 páginasRanking de Ventas Por Año PDFericAún no hay calificaciones
- Tipo de Ejercicios 1Documento17 páginasTipo de Ejercicios 1Sergio Felipe GrisalesAún no hay calificaciones
- Experiencia #5 - 5to Grado-3057Documento10 páginasExperiencia #5 - 5to Grado-3057ARMANDOAún no hay calificaciones
- Taller El Hombre Que CalculabaDocumento3 páginasTaller El Hombre Que CalculabaAnderson Quintero AvilaAún no hay calificaciones
- Taller Ecuaciones A6Documento7 páginasTaller Ecuaciones A6Yerly barrios maxAún no hay calificaciones
- 044 Psicotecnia en Educacion EspecialDocumento2 páginas044 Psicotecnia en Educacion EspecialMagu Doma100% (2)
- Paso 2 Electronica Digital UnadDocumento15 páginasPaso 2 Electronica Digital UnadTomás Moreno100% (1)
- Tema 1Documento13 páginasTema 1hernan leguiaAún no hay calificaciones
- Esfera Geometria GeunicaDocumento3 páginasEsfera Geometria GeunicaJose TipianaAún no hay calificaciones
- Proporcionalidad Directa Problemas Resueltos PDFDocumento7 páginasProporcionalidad Directa Problemas Resueltos PDFAldair BolañosAún no hay calificaciones
- 1.3 Progresiones Aritméticas y GeométricasDocumento20 páginas1.3 Progresiones Aritméticas y GeométricasÅLex ÅrellanoAún no hay calificaciones
- 2.3estadística1005 2019 1S Probabilidad Parte3Documento33 páginas2.3estadística1005 2019 1S Probabilidad Parte3zldiegolz 99Aún no hay calificaciones
- Modulo Algebra Trigonometria y Geometria Analitica 2011Documento361 páginasModulo Algebra Trigonometria y Geometria Analitica 2011Diego Andres Garcia100% (1)
- Metodo de Elementos de ContornoDocumento2 páginasMetodo de Elementos de ContornoFabianAlejandroCayoRiverosAún no hay calificaciones
- PromediosDocumento2 páginasPromediosfrancoAún no hay calificaciones
- Técnicas de ConteoDocumento12 páginasTécnicas de ConteoAndrea ZapataAún no hay calificaciones
- Planeacion Mate V 2015-2016Documento17 páginasPlaneacion Mate V 2015-2016Grajeda JesAún no hay calificaciones
- Distribución de Probabilidad Normal ApunteDocumento2 páginasDistribución de Probabilidad Normal ApunteKIRNANDAún no hay calificaciones
- Hoja 4 TrabajoDocumento2 páginasHoja 4 TrabajoJosé LaraAún no hay calificaciones
- Taller 2Documento2 páginasTaller 2Maria Del Pilar VargasAún no hay calificaciones
- Construccion de La Ciencia-1Documento23 páginasConstruccion de La Ciencia-1Gely RosasAún no hay calificaciones
- Conceptos Básicos de LimitesDocumento3 páginasConceptos Básicos de LimitesDANIEL ALEJANDRO SANDOVAL QUEZADAAún no hay calificaciones
- ConsultaDocumento5 páginasConsultaGisela Murgas Zuleta100% (1)
- Fisica SegundoDocumento23 páginasFisica SegundoProf. Leonardo Sanabria chaparroAún no hay calificaciones
- R.M. TotalDocumento6 páginasR.M. Totaljose alvaAún no hay calificaciones
- Guia de 3er Año MatematicaDocumento6 páginasGuia de 3er Año MatematicaJoselys GonzalezAún no hay calificaciones
- Ejercicios de StewartDocumento6 páginasEjercicios de StewartOscar Ivan Suarez Gomez0% (1)
- Ficha I - Números EnterosDocumento4 páginasFicha I - Números EnterosIAAún no hay calificaciones