50% encontró este documento útil (2 votos)
1K vistas13 páginasUnidad 2 Microcontroladores
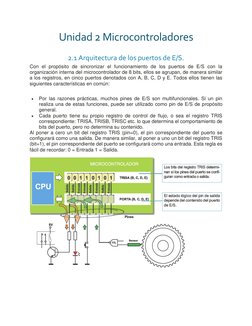
El documento describe la arquitectura de los puertos de entrada y salida en los microcontroladores de 8 bits. Explica que los puertos se agrupan en cinco puertos denominados A, B, C, D y E, cada uno con su propio registro de control TRIS. Al poner un bit del registro TRIS en 0, el pin correspondiente se configura como salida, mientras que al ponerlo en 1 se configura como entrada. También habla sobre la programación y configuración de displays de 7 segmentos y LCD conectados a los puertos.
Cargado por
Ignacio Mortera MarquezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como DOCX, PDF, TXT o lee en línea desde Scribd
50% encontró este documento útil (2 votos)
1K vistas13 páginasUnidad 2 Microcontroladores
El documento describe la arquitectura de los puertos de entrada y salida en los microcontroladores de 8 bits. Explica que los puertos se agrupan en cinco puertos denominados A, B, C, D y E, cada uno con su propio registro de control TRIS. Al poner un bit del registro TRIS en 0, el pin correspondiente se configura como salida, mientras que al ponerlo en 1 se configura como entrada. También habla sobre la programación y configuración de displays de 7 segmentos y LCD conectados a los puertos.
Cargado por
Ignacio Mortera MarquezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como DOCX, PDF, TXT o lee en línea desde Scribd