También podría gustarte
- Tipos de Transistores Y de Diodos de Potencia (11/04/2023) : Niversidad Técnica "Luis Vargas Torres" de EsmeraldasDocumento7 páginasTipos de Transistores Y de Diodos de Potencia (11/04/2023) : Niversidad Técnica "Luis Vargas Torres" de EsmeraldasLeandro EstupiñanAún no hay calificaciones
- Laboratorio CAF2 #2Documento4 páginasLaboratorio CAF2 #2Jorge Pardo Mendoza100% (1)
- EXPOSICION Sistema de ArranqueDocumento2 páginasEXPOSICION Sistema de ArranqueEdwin CañonAún no hay calificaciones
- Informe 3 de SensoresDocumento16 páginasInforme 3 de SensoresANTHONY HUAMANAún no hay calificaciones
- Diodo Schottky Trabajo de InvestigacionDocumento3 páginasDiodo Schottky Trabajo de InvestigacionAlexander Sanchez MoralesAún no hay calificaciones
- Informe No 7 Coordinaci N de Rel S de SobrecorrienteDocumento7 páginasInforme No 7 Coordinaci N de Rel S de SobrecorrienteEstiven Rodriguez RestrepoAún no hay calificaciones
- CumminsDocumento6 páginasCumminsEduardo Chamo AtAún no hay calificaciones
- AEI.01 Características Controles Electricos IndustrialesDocumento7 páginasAEI.01 Características Controles Electricos IndustrialesYUDY NATALIA CASTELBLANCO RINCONAún no hay calificaciones
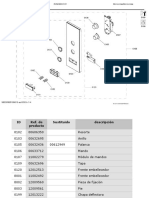
- Exploded ViewDocumento8 páginasExploded ViewJuan Antonio Palacios ClavijoAún no hay calificaciones
- Electrotecnia BasicaDocumento23 páginasElectrotecnia BasicaAlex anthony Rivera calcinaAún no hay calificaciones
- Grupal 1 2bDocumento3 páginasGrupal 1 2bdiortega2Aún no hay calificaciones
- Tarea PDFDocumento2 páginasTarea PDFSamuel JimenezAún no hay calificaciones
- PedrofiloDocumento4 páginasPedrofiloel proAún no hay calificaciones
- Manual Cargador de Pilas AA AAA y Cuadrada 9V Steren 903-210Documento2 páginasManual Cargador de Pilas AA AAA y Cuadrada 9V Steren 903-210KhrimshaktAún no hay calificaciones
- Motor MonofasicoDocumento9 páginasMotor MonofasicoFrancisco EcheverriaAún no hay calificaciones
- Simbolos Electronicos - Sesion 5 - Fisica 6º de SecundariaDocumento12 páginasSimbolos Electronicos - Sesion 5 - Fisica 6º de SecundariaAlejandra Lourdes Revollo QuispeAún no hay calificaciones
- T8PP4Documento44 páginasT8PP4Fernando OletaAún no hay calificaciones
- Plano Pampa 3Documento6 páginasPlano Pampa 3Emmanuel SilvaAún no hay calificaciones
- CDPractica 2Documento5 páginasCDPractica 2josemigueldav05Aún no hay calificaciones
- Laboratorio N5Documento19 páginasLaboratorio N5Christiam Paul Ramírez100% (1)
- Punta Logica ProfesionalDocumento6 páginasPunta Logica Profesionalceren2010Aún no hay calificaciones
- Electronica AnalogicaDocumento13 páginasElectronica Analogicaangel avilaAún no hay calificaciones
- Modulo 3 Analisis de Motores de Corriente Continua PDFDocumento17 páginasModulo 3 Analisis de Motores de Corriente Continua PDFBrian CastilloAún no hay calificaciones
- Laboratorio 1 Polarizacion de TransistoresDocumento3 páginasLaboratorio 1 Polarizacion de TransistoresJesus Martin Alvarez VasquezAún no hay calificaciones
- Ingenieria en Energía: Tema 3.3 Motor de InducciónDocumento6 páginasIngenieria en Energía: Tema 3.3 Motor de InducciónVictor CoelloAún no hay calificaciones
- Modelo Planilla de LiquidacionDocumento1 páginaModelo Planilla de LiquidacionFranz LinaresAún no hay calificaciones
- Laboratorio Aplicaciones de Los DiodosDocumento8 páginasLaboratorio Aplicaciones de Los Diodosapi-27527336100% (1)
- 1 MOTORES EL+ëCTRICOS Y VARIADORES DE VELOCIDAD PDFDocumento9 páginas1 MOTORES EL+ëCTRICOS Y VARIADORES DE VELOCIDAD PDFAlejandro Salas VásquezAún no hay calificaciones
- Amperimetro para AutomovilDocumento4 páginasAmperimetro para AutomovilLIMBERTOLEDOAún no hay calificaciones
- PedestalDocumento4 páginasPedestalCarmen VargasAún no hay calificaciones