Documentos de Académico
Documentos de Profesional
Documentos de Cultura
6 AnaTemp 1 2 v1.8b PDF
6 AnaTemp 1 2 v1.8b PDF
Cargado por
Oscar Bautista Santa MariaTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
6 AnaTemp 1 2 v1.8b PDF
6 AnaTemp 1 2 v1.8b PDF
Cargado por
Oscar Bautista Santa MariaCopyright:
Formatos disponibles
6 Anlisis en el dominio del
tiempo de sistemas de primer y
segundo orden
En un primer anlisis simplificado, las propiedades dinmicas de las plantas
pueden ser aproximadas por las caractersticas temporales de sistemas ms simples. Se
entiende por modelos simples, aquellos que definen su dinmica por ecuaciones
diferenciales lineales de primer o de segundo orden.
Como se ver en el siguiente captulo, los modelos de los equipos pueden ser
abordados por funciones de transferencias sencillas. Este paso se da en una doble
vertiente. Desde el punto de vista del anlisis, al reducir el modelo se podr predecir sus
caractersticas temporales, empleando expresiones matemticas sencillas. Por otro lado,
desde el punto de vista del diseo, se suele emplear las caractersticas temporales de los
modelos simples para fijar los requisitos del comportamiento dinmico de los sistemas a
compensar.
Por todas estas razones, este tema pretende analizar el comportamiento dinmico
temporal de los sistemas simples, fijando su evolucin temporal as como de tantos
parmetros como exija para su determinacin matemtica.
Dpto. Electrnica, Automtica e Informtica Industrial 129
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
6.1 Sistemas de primer orden
Se denomina orden de un sistema al grado de su polinomio caracterstico, i.e. el
nmero de polos que tiene el sistema en su conjunto.
La funcin de transferencia de un sistema de primer orden es:
N s
Gs
s a (6. 1)
donde N(s) es el polinomio del numerador de coeficientes constante al ser de tipo LTI.
Por el principio de causalidad, el grado de N(s) es cero o uno, bien es una constante o es
un cero de primer orden. Considrese el caso ms simple, el numerador corresponde a
una ganancia. La relacin entre la entrada y salida del sistema vendr dada por una
ecuacin diferencial de primer orden:
Ty t yt kxt (6. 2)
siendo x(t) la seal en la entrada e y(t) es la salida. Aplicando a ambos lados de la
igualdad la transformada de Laplace y considerando condiciones iniciales nulas, se
conseguir la FDT de los sistemas de primer orden:
Y s
Gs
k k /T
X s 1 Ts 1
s
T (6. 3)
El valor de k ser la ganancia esttica del equipo y T ser la constante de tiempo.
En general, denominando ai y bi a los coeficientes de los polinomios del denominador y
del numerador, respectivamente, de grado i, las dos FDT de primer orden de los
sistemas causales sern:
b0
a1 y a0 y b0 x Gs
.
a1 s a0 (6. 4)
b0 b1 s
a1 y a0 y b0 x b1 x Gs
. .
a0 a1 s (6. 5)
Sin embargo, para determinar la respuesta dinmica del sistema de primer orden
se emplear el modelo de la ecuacin (6. 3). En el caso de que tuviera un cero de primer
orden, desde luego, su dinmica cambiar. Pero desde el punta de vista metodolgico,
se plantear como la adicin de un cero en serie al sistema simple definido en la ec. (6.
3). Estos aspectos sern tratados en el captulo siguiente. Por lo tanto, se va a tratar de
definir la respuesta dinmica de un sistema simple de primer orden y en el caso de que
130 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
tuviese un cero, su efecto se ver como una adicin en serie a la dinmica del sistema
simple.
6.1.1 Respuesta temporal ante la entrada en escaln
Para analizar la dinmica del sistema de primer orden se requiere conocer qu
tipo de entrada excitar al equipo. Como a priori no se conoce la naturaleza de esta
seal, tal cual se coment en el anterior captulo, se emplearn las seales de pruebas.
En el dominio temporal se definieron tres entradas normalizadas: escaln, rampa y
parbola. Por dicha razn, la caracterizacin de los sistemas de primer y segundo orden
en el dominio temporal se dar con estas excitaciones unitarias.
Suponiendo un sistema de primer orden simple caracterizado por su ganancia k y
su constante de tiempo T, al ser estimulado por una seal de entrada en escaln unitario
evolucionar a partir de la convolucin entre la entrada y el sistema. Aplicando las
transformadas de Laplace y haciendo la descomposicin en fracciones simples, la
transformada de Laplace de la salida valdr:
1 1 k1 k
Y s
1 k
k 2
s 1 sT s 1 sT s s 1
T (6. 6)
Empleando el clculo de los residuos ser fcil de determinar la
antitransformada y por ende la evolucin temporal de la seal de salida, en funcin de
sus dos parmetros caractersticos, k y T:
k1 sY s s 0 k
yt k 1 e t / T (6. 7)
1
k 2 s Y s k
T s 1
T
Pero antes de representar la evolucin temporal de un sistema de primer orden
simple con una entrada en escaln, vase la correlacin entre el dominio complejo de
Laplace y el temporal. Utilizando el teorema del valor final sobre la transformada de
Laplace de la salida y haciendo el lmite cuando el tiempo tiende a infinito en la ec.(6.
7), los resultados son idnticos. La salida alcanzar, en el rgimen permanente, el nivel
de la ganancia esttica del sistema, k:
Valor final: lim sY s k lim yt k
s 0 t
Ntese que si el mdulo de la ganancia, |k|, es mayor que uno el sistema
amplifica, en caso contrario, atena, i.e. la amplitud de la salida es ms pequea que la
entrada.
Dpto. Electrnica, Automtica e Informtica Industrial 131
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
Para resolver el valor inicial slo basta con aplicar el teorema del valor inicial
sobre la ec.(6. 6) o hacer tender el tiempo a cero en la ec. (6. 7):
Valor inicial: lim sY s 0 lim yt 0
s 0 t 0
La constante de tiempo del sistema, T, define la rapidez del equipo. De hecho,
cuando el intervalo de tiempo recorrido desde el inicio de la estimulacin hasta la
constante de tiempo, la seal de salida ya ha alcanzado una buena parte de su recorrido:
Valor t = T :
yt T k 1 e 1 0.632k (6. 8)
Se define el tiempo de establecimiento, ts, como el tiempo que necesita el
sistema para alcanzar el valor del rgimen permanente. El valor de la seal del
permanente no es exactamente el valor final. Atendiendo a la ec. (6. 7) y si se pusiera la
condicin de lograr el valor de nivel de k ante una entrada en escaln unitario, el tiempo
sera infinito y no habra medida de comparacin entre estos sistemas sobre su
velocidad de respuesta. Por dicha razn, se suele emplear el error del 5% o el 2% del
valor final. En este curso se emplear el 5% de error del valor del rgimen permanente.
Para un valor de tres veces la constante de tiempo del sistema de primer orden, T,
coincide con alcanzar el 5% de error del valor final:
Valor t = 3T :
yt 3T k 1 e 3 0.95k (6. 9)
Por tanto, para sistemas de primer orden simples, el tiempo de establecimiento
es de tres veces la constante de tiempo. Si la definicin est dada con el 2%, entonces el
tiempo de establecimiento es de cuatro veces la constante de tiempo. Concluyendo, si el
sistema es de primer orden simple, los valores caractersticos pueden ser determinados
experimentalmente ante la respuesta de una entrada en escaln unitario. La ganancia
esttica, k, ser el valor final de la seal de salida y la constante de tiempo, T, est dada
Respuesta al escaln unitario
k
0.95k
x(t)
1 x(t) y(t) 0.632k
G(s)
Amplitud
0
x(s) y(s)
0
0 T 3T
Tiempo (s)
Figura 6. 1. Respuesta de un sistema de primer orden simple ante una entrada en escaln
unitario
132 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
por el tiempo en que alcanza 0.632 veces el valor de k o tres veces su valor coincidir
con el tiempo de establecimiento, ts, esto es, el tiempo en alcanzar la seal 0.95k.
6.1.2 Respuesta impulsional
La respuesta impulsional de un sistema coincide con su propia funcin de
ponderacin, g(t). De hecho, esta propiedad es empleada como tcnica experimental
para realizar la identificacin de sistemas. La forma de demostrarlo consiste en
determinar la transformada de Laplace de la excitacin impulsional y luego aplicar el
teorema de la convolucin continua. Se define una entrada impulsional, aquella que en
un tiempo infinitesimal, , da un pulso de energa que tiende a ser infinito, 1/.
1/ 0t
t
0 t 0 o t (6. 10)
Su transformada de Laplace coincide con la unidad:
1 e st se s
L t lim
1 1
H
st s
e dt lim lim 1 e lim 1
0 0 0
s 0 0 s 0 s (6. 11)
Concluyendo que al dar una entrada de este tipo, la seal de salida coincide con
la propia naturaleza de la planta, y(t)=g(t), por el teorema de la convolucin. Para el
caso que ocupa de sistemas simples de primer orden, resultar:
Y s Gs yt g t
k k t / T
e
1 sT T (6. 12)
Y s
k k /T
1 sT 1
s
T (6. 13)
Adems, para sistemas LTI, la respuesta al impulso es la derivada de la salida al
escaln:
y escalon t k 1 e t / T y escalon t
k t / T
T
e g t
(6. 14)
Dpto. Electrnica, Automtica e Informtica Industrial 133
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
La aplicacin de los teoremas del valor final y del inicial debe de coincidir con
la respuesta de la excitacin impulsional de los sistemas de primer orden, definido por
la ec.(6. 12):
yt 0
k
Valor final: lim s 1 0
s 0 1 sT (6. 15)
Valor inicial: y t 0
k k k
lim s 1 (6. 16)
T s 1 sT T
Los valores caractersticos de la Respuesta al impulso
seal de salida cuando el tiempo k/T
coincide con la constante de tiempo o
cuando el tiempo es de tres veces la
constante de tiempo del sistema estn Amplitud
dados por la ec.(6. 12), simplemente
sustituyendo:
0.367k/T
yt T e 1 0.367
k k
T T
0.05k/T
0
yt 3T e 3 0.05
k k 0 T 3T
Tiempo (s)
T T
Figura 6. 2. Respuesta impulsional de un sistema
simple de primer orden
Ejemplo 6.1
ue(t) us(t)
Para el cuadripolo de la figura R
determinar su respuesta ante la entrada en 100k C
escaln unitario y ante una excitacin 10nF
impulsional. Considrese condiciones
- -
iniciales nulas.
Al haber un elemento de almacenamiento de energa, el sistema tendr un
modelo de primer orden:
du s t
u e t RC u s t AV s
1 1
dt 1 RCs 1 10 3 s
134 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
Respuesta al escaln unitario Respuesta al impulso
1 1000V
0.95
Amplitud
0.632
Amplitud
367V
5V
0 0
0 1 ms 3 ms 0 0.001 0.003
Tiempo (s) Tiempo (s)
6.1.3 Respuesta a la rampa
Dos mtodos se pueden plantear para determinar la respuesta ante una excitacin
en rampa unitaria. Bien a travs de la transformada de Laplace de la salida o bien
empleando el teorema de la integracin. Este ltimo proceder se basa que la rampa
unitaria corresponde con la integral en el tiempo de una seal en escaln unitario.
1. Descomposicin en fracciones simples: La respuesta del sistema ante una
rampa unitaria presenta un polo doble en el origen. El clculo de los residuos
de la antitransforma de la salida exige la formulacin de la multiplicidad de
las races:
a a k
Y s
1 k
22 1 1
s 1 sT s
2
s 1
s
T (6. 17)
a2 s 2Y s s 0 k (6. 18)
d k k T
a1 s 2 2 2
kT
ds s 1 sT s 0 1 sT s 0 (6. 19)
1 1 k /T k /T
k1 s 2 kT
Ts
s
1 1 / T 2
T s 1
T (6. 20)
yt k t T Te t / T (6. 21)
2. La respuesta a la rampa es la integral de la respuesta al escaln:
Dpto. Electrnica, Automtica e Informtica Industrial 135
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
0 0
t
y rampa t yescalon d k 1 e / T d k Te / T
t
t
0 (6. 22)
y rampa t k t Te t / T T (6. 23)
En general, para sistemas LTI, la respuesta a la derivada de una seal de entrada,
puede ser obtenida derivando la respuesta del sistema, a la seal original. As mismo, la
respuesta a la integral de una seal se puede obtener integrando la respuesta a la seal
original.
Por ambos mtodos los resultados son idnticos, las ecuaciones finales (6. 21) y
(6. 23) son iguales. En la salida existe un transitorio al iniciar la excitacin y luego la
componente rampa es el efecto dominante. En la figura 6.3 se puede apreciar la
evolucin temporal. La salida, en el rgimen permanente, sigue a la de mando con un
error dado por la ganancia y la constante de tiempo del sistema. Para el caso de tener
una ganancia esttica unitaria en el sistema (k = 1), el error coincide con la constante de
tiempo del sistema:
lim et limxt yt t k t T T
t t
Respuesta a la rampa unitaria
10
6 T
Amplitud
0
0 1 2 3 4 5 6 7 8 9 10
Tiempo (s)
Figura 6. 3. Evolucin de un sistema de primer orden con ganancia unitaria ante
una rampa unitaria
136 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
6.2 Anlisis temporal de sistemas de segundo orden
Las ecuaciones diferenciales de sistemas LTI de segundo orden describen las
dinmicas de sistemas con dos elementos de almacenamiento de energa en su interior.
La expresin matemtica que modela la dinmica de estos equipos est definida por:
. .. . ..
a0 y a1 y a2 y b0 x b1 x b2 x (6. 24)
donde ai y bi son escalares constantes, x(t) es la excitacin e y(t) es la salida.
Considerando condiciones iniciales nulas o variaciones lineales alrededor de un punto
de reposo, la FDT ser:
Y s b0 b1 s b2 s 2
Gs
X s a0 a1 s a2 s 2 (6. 25)
El caso ms simple de sistema de segundo orden es cuando los coeficientes b1 y
b2 son nulos:
b0
Gs
a0 a1 s a 2 s 2 (6. 26)
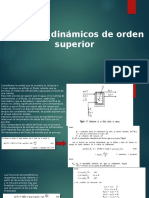
La dinmica de este caso, como la de
todos los sistemas LTI, est definida bsicamente j
por las races del denominador. La naturaleza de
los polos puede ser de tipo real o compleja
conjugada. Si los polos son reales, la respuesta a
la entrada al escaln estar definida por las dos
exponenciales, cuyos exponentes dependern de P2 P1
la ubicacin de los polos. Ntese que la constante
1 1
de tiempo de un polo real, Ti, es la inversa del
valor del polo pi, Ti= -1/pi pi<0. Empleando las T2 T1
transformadas de Laplace es fcil conseguir la
respuesta temporal ante una excitacin al escaln Figura 6. 4. Races reales de un sistema
unitario: de segundo orden
b0
G( s)
s p1 s p2 (6. 27)
b0 k k2 k3
Y s
1
1
s s p1 s p 2 s s p1 s p 2 (6. 28)
Dpto. Electrnica, Automtica e Informtica Industrial 137
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
yt k1 k 2 e p1t k 3 e p2t (6. 29)
En cambio, ya no resultar tan evidente la salida si las races del denominador
son complejas y conjugadas. Antes de determinar la evolucin temporal de la salida, se
va a analizar los parmetros que definen la respuesta de estos sistemas. Si en los
sistemas de primer orden simples, los parmetros eran la ganancia esttica, k, y la
constante de tiempo, T. En los sistemas de segundo orden simples los parmetros son
tres: la ganancia esttica, k, el factor de amortiguamiento, , y la frecuencia natural no
amortiguada, n. La ec. (6. 26) queda determinada por un modelado a partir de sus
parmetros caractersticos:
k n2
G s
k
s
2
s s 2 2 n s n2 (6. 30)
2 1
n n
La frecuencia natural, n, corresponde a una velocidad angular constante y sus
dimensiones son radianes/segundo. Su interpretacin en el dominio complejo es la
distancia eucldea entre el origen de coordenadas y los polos complejos y conjugados.
El factor de amortiguamiento, , es adimensional. Si es mayor a 1 1, en valor
absoluto, las races son reales, en caso contrario, son complejas y conjugadas.
Las soluciones del polinomio del denominador de segundo grado estarn
determinadas por su resolucin en funcin de los parmetros n y :
2 n 2 n 2 4 n2
n j n 1 2
2 (6. 31)
Si el factor de amortiguamiento, , es en valor absoluto menor que la unidad, las
races sern complejas, segn se desprende de la ec. (6. 31). Para estos casos, habr una
componente real y otra imaginaria conjugada. La primera se llamar constante de
amortiguamiento, , cuya ubicacin se dar en el eje real:
n
n j d
La segunda es la frecuencia de cos
amortiguamiento, d, y se encontrar en el
eje imaginario:
d n 1 2 rad / s
j d
La frecuencia natural, n, ser la
hipotenusa del tringulo rectngulo Figura 6. 5. Polos complejos y conjugados de
formado por los catetos de constante de un sistema de segundo orden
138 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
amortiguamiento, , y frecuencia de amortiguamiento, d:
n2 2 d2 0 1
Adems, el ngulo de apertura de los polos complejos, , estar relacionado con
el coeficiente de amortiguamiento, , si su valor absoluto es menor a la unidad:
cos 0 1
6.2.1 Respuesta al impulso de un sistema de segundo orden
subamortiguado.
A los sistemas de segundo orden, cuyos factores de amortiguamiento estn entre
0 y 1, 0 1 , sus soluciones son complejas y conjugadas. Si adems se pide que
sean estables, se exigir que el factor de amortiguamiento sea mayor que cero. Se
llaman sistemas subamortiguados cuando el factor de amortiguamiento sea mayor que
cero y menor que uno. Los polos sern complejos y conjugados y se ubican en el
semiplano negativo del dominio complejo.
La respuesta impulsional de un sistema subamortiguado simple indicar su
propia naturaleza. Aplicando la descomposicin en fracciones simples en su
transformada permitir ver la evolucin temporal:
k n2 k n2
G s 2
s 2 n s n2 s j d s j d
k1 k2
s j d s j d (6. 32)
Haciendo la antitransformada y empleando el clculo de los residuos de dos
polos simples (da igual que sean reales que complejos):
g t k1e jd t k 2 e jd t (6. 33)
k n2 k n
k1 s j d G s s j d
2 j d 2 j 1 2
k n2 k n
k 2 s j d G s s j d
2 j d 2 j 1 2 (6. 34)
Dpto. Electrnica, Automtica e Informtica Industrial 139
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
Introduciendo el clculo de los residuos en la ec.(6. 32) y sacando factor comn
k n
a e t , se conseguir una expresin a la que posteriormente se emplear la
1 2
relacin de Euler:
k n e j d t e j d t k n
g t e t
e t sen d t
1 2
2j 1 2
(6. 35)
La respuesta impulsional para un sistema subamortiguado es una combinacin
de una exponencial montonamente decreciente con el tiempo y un armnico de
frecuencial d. El resto de la expresin es un valor constante. La excitacin depende de
la constante de amortiguamiento, , y de la frecuencia de amortiguamiento, d. Las
conclusiones de la ec. (6. 35) requieren de un anlisis detallado.
En primer lugar, considrese el efecto de la constante de amortiguamiento, . El
lugar geomtrico de la constante de amortiguamiento son rectas paralelas al eje
imaginario. Los polos complejos situados sobre estas rectas paralelas tendrn igual
constante de amortiguamiento. A medida de que la constante de amortiguamiento, , se
hace mayor, el sistema es ms rpido.
Respuesta impulsional con igual frecuencia de amortiguamiento
0.25
0.2
1, d 3
Mas rpido Estable 0.15
j
0.1
Amplitud
0.05
-0.05
2, d 3
-0.1
0 1 2 3 4 5 6
Tiempo [s]
Figura 6. 6. a) Lugar geomtrico de la constante de amortiguamiento b) Respuesta
impulsional de dos sistemas con igual frecuencia de amortiguamiento y distinta constante de
amortiguamiento
En cambio, el lugar geomtrico de la frecuencia de amortiguamiento, d, sern
rectas paralelas al eje real. Aquellas races del denominador que estn a la misma altura
respecto al eje real, tendrn igual frecuencia de amortiguamiento. En cuanto aumente la
frecuencia de amortiguamiento, d, menor ser el periodo del armnico y para un
mismo valor de coeficiente de amortiguamiento, , el nmero de oscilaciones, antes de
apagarse la salida, ser mayor.
140 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
Respuesta impulsional con igual constante de amortiguamiento
0.25
j
0.2
1, d 3
0.15
0.1
Amplitud
1, d 5
0.05
-0.05
-0.1
0 1 2 3 4 5 6
Tiempo [s]
Figura 6. 7. a) Lugar geomtrico de la frecuencia de amortiguamiento, b) Respuesta
impulsional de dos sistemas con igual constante de amortiguamiento y diferente
frecuencia de amortiguamiento
Las naturalezas de los polos de los sistemas de segundo orden estn
determinadas por el factor de amortiguamiento. Si el es menor a cero el sistema es
inestable. Cuando est entre 0 y 1 las races son complejas y conjugadas, situadas en el
semiplano negativo. Un valor del igual a la unidad, indica que los polos son dobles y
reales, con valor negativo. Por ltimo, valores del coeficiente de amortiguamiento
mayor a 1, indica dos races negativas y reales:
0<<1 Subamortiguado
j s n j n 1 2 (6. 36)
0
1 0
0 1
=0 Crticamente estable
s j d j n (6. 37)
1 =1
No amortiguado
s n (6. 38)
1
1 >1
(polo doble real)
Sobreamortiguado
s n n 2 1 (6. 39)
Figura 6. 8. Polos de segundo orden en funcin<0 Inestable
del coeficiente de amortiguamiento
6.2.2 Respuesta en escaln
Se propone al lector que demuestre que la respuesta al escaln unitario de un
sistema de segundo orden simple:
Dpto. Electrnica, Automtica e Informtica Industrial 141
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
G s
k
2
s s
2 1
n n (6. 40)
Si 0 1 , entonces la salida es igual a:
e t
y t k 1 sen d t
1 2
(6. 41)
De dos maneras distintas pueden ser calculadas la respuesta al escaln. Una a
travs de la descomposicin en fracciones simples de la transformada de Laplace de la
salida. La otra posibilidad es la integracin en el tiempo de la respuesta al impulso (ver
ec. (6. 35)).
Al igual que en el anterior captulo, se resume el comportamiento de los sistemas
de segundo orden ante una entrada en escaln unitario a travs de un cuadro resumen.
Aparecern los polos segn el coeficiente de amortiguamiento y cul es la evolucin
temporal de su salida:
Situacin del polo Respuesta al escaln Sistema
Sobre
Amortiguado
>1
142 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
Crticamente
amortiguado
=1
Sub
amortiguado
0<<1
Crticamente
estable
=0
Dpto. Electrnica, Automtica e Informtica Industrial 143
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
INESTABLE
-1<<0
INESTABLE
<-1
144 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
6.2.3 Caracterizacin de la respuesta temporal al escaln de un sistema
subamortiguado
La importancia de definir los parmetros temporales de un sistema
subamortiguado al escaln, se debe a que las dinmicas de muchas plantas o procesos
fsicos son aproximadas a esta FDT. Este modelado simplificado permite conocer las
caractersticas de la estabilidad y de la naturaleza de la respuesta del rgimen transitorio
a partir de sus parmetros caractersticos, n , , , d y . Adicionalmente, no slo
permite analizar o predecir el comportamiento temporal, sino que, a veces, los requisitos
de diseo de los reguladores de control, emplean definiciones dadas en este epgrafe,
como por ejemplo el valor de sobreoscilacin. Por todas estas razones, se trata de
caracterizar mediante medidas de tiempo y de valor de pico, la salida de un sistema
x(t)
1 x(t) y(t)
G(s)
0
x(s) y(s)
Tiempos de un sistema subamortiguado
Mp
Amplitud
tr tp ts Tiempo [s]
subamortiguado ante una excitacin de escaln unitario.
Segn se observa de la figura adjunta, los tiempos que se definen son:
Tiempo de establecimiento, ts: valor de tiempo que el sistema necesita en
alcanzar un error del 5% 2%, segn criterio, del valor final del rgimen
permanente.
Tiempo de pico, tp: intervalo de tiempo en darse la mxima amplitud de
salida (slo es vlido si el factor de amortiguamiento est entre 0 y 0.7,
0 0.7 ). En caso contrario, no habr sobreoscilacin y no tiene
sentido este parmetro.
Dpto. Electrnica, Automtica e Informtica Industrial 145
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
Sobreoscilacin, Mp: Valor de pico mximo de la salida ponderado con el
valor final. Slo sucede si 0 0.7 .
Tiempo de subida, tr: el tiempo transcurrido en alcanzar por primera vez
el 100% del valor final de la seal de salida. Tambin se define como el
intervalo de tiempo entre el 10% al 90% del valor final de la seal.
El objetivo que se pretende es obtener expresiones matemticas que determinen
los valores caractersticos temporales y de sobreoscilacin, a travs de los parmetros
caractersticos de los sistemas de segundo orden n , , , d y .
6.2.3.1 Tiempo de establecimiento, ts
El tiempo que necesita en alcanzar el rgimen permanente con un error del 5% o
del 2% del valor final, depende bsicamente de la componente envolvente de la seal de
salida. Ntese de la ec. (6. 42) que la salida es una combinacin entre un armnico y
una exponencial montonamente decreciente. Simplificando y no considerando el efecto
senoidal, el 95% 98% de la seal se alcanzar cuando la envolvente valga 0.05
0.02, segn criterio del 5% o el 2% del valor final.
e t
y t k 1 sen d t
1 2
(6. 42)
Con el criterio del 5% de error del valor final, el tiempo de establecimiento es
aproximadamente:
e t s
0.05 e
1 2
(6. 43)
Para valores pequeos de coeficiente de amortiguamiento, 0 0.7 , el tiempo
de establecimiento es inversamente proporcional a la constante de amortiguamiento:
1 t s
t s (6. 44)
6.2.3.2 Tiempo de pico, tp
Este valor se dar cuando se alcance el valor mximo de la amplitud de la seal
de salida. Considerando la primera derivada de la expresin analtica de la respuesta al
escaln unitario e igualando a cero, permitir definir los tiempos de mximos y
mnimos de amplitud de la seal:
146 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
dyt e t p
t
0 k sen d t p cos d t p d
e p
dt 1 2 1 2
(6. 45)
Reordenando la expresin, los tiempos de mximos y mnimos estarn validados
por la coincidencia del ngulo de apertura de los polos complejos y conjugados, , con
vueltas enteras de radianes de d t :
d n 1 2
tg d t p tg
n (6. 46)
La primera vuelta de radianes de d t coincidir con la amplitud mxima de la
seal de salida. El tiempo de pico es inversamente proporcional a la frecuencia de
amortiguamiento. Habr tiempo de pico si hay sobreoscilacin y sta la habr si el
factor de amortiguamiento est entre 0.707 y 0.
d t p t p
d
d t p (6. 47)
1.6
1.4
1.2
0.8
0.6
0.4
0.2
2 3 4 5 6
d d d d d d
Dpto. Electrnica, Automtica e Informtica Industrial 147
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
6.2.3.3 Sobreoscilacin, Mp
Hay sobreoscilacin si el factor de amortiguamiento est entre 0.707 y 0. La
sobreoscilacin se dar en el tiempo de tipo, tp, y corresponder con el valor ponderado
entre la mxima amplitud respecto al valor de salida en el rgimen permanente. Al tener
un sistema de ganancia esttica k, la respuesta del rgimen permanente al escaln
unitario tambin ser k veces de amplitud. Introduciendo el valor de tiempo de pico en
la ec. (6. 42), para calcular el valor mximo y dando la definicin de sobresocilacin,
MP, quedar como:
e / d e / d
k 1 sen k 1
sen 1
y max y rp 1 2 1 2
Mp e / d
y rp k 1 (6. 48)
El seno del ngulo de apertura y el radicando son ambas iguales expresiones. La
sobreoscilacin depender exclusivamente del ngulo de apertura de los polos
complejos, . Obviamente, para los sistemas subamortiguados, el factor de
amortiguamiento est relacionado con a travs del coseno, luego a menor implica
una mayor sobreoscilacin. Por tanto, la sobreoscilacin est relacionada con la
estabilidad. Se considera que un sistema es estable y con respuesta temporal aceptable
(compromiso entre estabilidad y rapidez), si el factor de amortiguamiento est entre 0.4
y 0.7, lo cual significa una sobreoscilacin entre el 12% y el 30% (ver captulo 13):
M p e / d e / tg ; M p % e / tg 100%
M p (6. 49)
6.2.3.4 Tiempo de subida, tr
Muy empleado en los catlogos de componentes electrnicos en el apartado de
las caractersticas dinmicas. El tiempo de subida es el intervalo de tiempo que tarda el
sistema o el dispositivo en pasar del 10% al 90% en una de sus seales.
Para el tratamiento matemtico y con el objeto de simplificar la expresin, se
considerar el paso de tiempo entre el 0% al 100% del valor final, esto es, la primera
vez que pasa la seal por el valor final.
En sistemas subamortiguados excitados con una entrada en escaln, suceder
cuando el segundo trmino de la ec.(6. 42) se haga nulo:
e t
sen d t r 0 sen d t r 0
1 2 (6. 50)
148 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
La primera vez pasar cuando el arco seno pase por el valor de :
d tr tr
d (6. 51)
6.2.4 Respuesta de un sistema de 2 orden al impulso y a la rampa
La repuesta al impulso de un sistema de segundo orden ser la derivada de la
ec.(6. 42), respecto al tiempo, cuya ecuacin hace referencia a la salida de un sistema de
segundo orden ante una entrada en escaln. Obviamente las conclusiones debern de
coincidir con las conseguidas por la descomposicin en fracciones simples de los polos
y dada por la ec. (6. 35):
k n
yimpulso t e t sen d t y escaln t
1 2
(6. 52)
Respuesta al escaln Respuesta al escaln
1 1.5
1
Amplitud
Amplitud
0.5
0.5
0 0
0 5 10 15 0 5 10 15
Respuesta al impulso Respuesta impulso
0.4 1
0.3
0.5
Amplitud
Amplitud
0.2
0
0.1
0 -0.5
0 5 10 15 0 5 10 15
Tiempo (s) Tiempo (s)
Figura 6. 9 a) Sistema sobreamortiguado b) sistema subamortiguado
La salida del sistema ante una entrada en rampa unitaria ser la integral respecto
al tiempo de la respuesta al escaln unitario:
Dpto. Electrnica, Automtica e Informtica Industrial 149
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
2 e t t
y rampa t k t sen d t y escaln d
n d 0 (6. 53)
Respuesta al escaln Respuesta al escaln
1 1.5
Amplitud
Amplitud
0.5
0.5
0 0
0 5 10 15 0 5 10 15
15 15
2
n
10 10
2
Amplitud
Amplitud
n
5 5
0 0
0 5 10 15 0 5 10 15
Tiempo (s) Tiempo (s)
Figura 6. 10. Respuesta a la rampa unitaria con ganancia esttica unitaria a)
Sobreamortiguado b) Subamortiguado
6.3 Retardo puro
Como consecuencia de la inercia de los elementos de almacenamiento de energa
que hay en los sistemas, suelen aparecer retardos netos de tiempo entre la seal de salida
respecto a la excitacin de entrada.
Hay muchos modelos de plantas que usan retardos puros en su funcin de
transferencia. As, por ejemplo, en la propuesta de Ziegler-Nichols para sistemas que
ante una entrada en escaln, su salida se aproxime a un sistema sobreamortiguado, el
modelo del sistema se configura con un retardo en la transmisin ms un polo de primer
orden:
150 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
G p s sTd
k
1 sT (6. 54)
u(t) Planta y(t)
Planta
K
Modelo
L T
Figura 6. 11. Propuesta de modelado de plantas de Ziegler-Nichols
El trmino e sTd , por el teorema de traslacin temporal de las transformadas de
Laplace, corresponde con un retardo puro de tiempo, siendo Td el tiempo de ese retraso.
Este concepto es empleado cuando se quiere expresar analticamente un desfase de
tiempo en la propagacin de la seal al pasar por el sistema.
Esta expresin es no lineal y hace que la relacin causa efecto no se pueda
formalizar en una FDT de polinomios de coeficientes constantes. Por tanto, no es del
tipo LTI. Sin embargo, existen varias aproximaciones de la funcin exponencial en
trminos lineales e invariante con el tiempo. Para valores pequeos de tiempo de retardo
se puede aproximar a un polo de primer orden:
1
e sTd
1 Td s
Aunque es ms correcto mediante la aproximacin de Pade:
Dpto. Electrnica, Automtica e Informtica Industrial 151
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
s
1 Td
e sTd 2
s
1 Td
2 (6. 55)
Esta aproximacin hace que las plantas que tienen un retardo puro se conviertan
en sistemas de fase no mnima, al tener un cero en el semiplano positivo. Los sistemas
de fase mnima son aquellos cuyos polos y ceros, de su FDT LTI, se encuentran en el
semiplano negativo del dominio complejo.
Ejemplo 6.2
El equipo de prcticas Peltier ante una respuesta de 5V en escaln, su
salida es:
Respuesta del equipo Peltier
7
Experimental
5
4
Amplitud
Modelo Z-N
3
0
0 10 20 30 40 50 60 70 80 90
Tiempo (sec)
Modelar la planta segn el criterio de Ziegler-Nichols y su FDT de tipo
LTI.
La ganancia esttica del equipo Peltier vendr dada por el valor final en el
rgimen permanente ponderado por la amplitud del escaln:
6.12
k 1.22
5
Sobre la grfica se observa que hay un retardo puro de 4s y que el sistema tarda
en alcanzar el 95% del valor final en 45 segundos:
152 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
41
Td=4s 3T 45 4 41s T 13.66s
3
El modelo de Z-N y su aproximacin por Pade sern:
Td
1 s
G p s e sTd
k 2 k
1 sT T 1 sT
1 d s
2
dando valores,
1 2s 1.22 s 0.5 0.09
G p s e 4 s
1.22
1 13.66s 1 2s 1 13.66s s 0.5 s 0.073
1
Empleando una aproximacin ms simplificado del retardo, e sTd , el
1 Td s
sistema queda como:
1.22 / 4 13.66
G p s
0.09 0.045
s 0.25s 0.073 s 0.25s 0.073 s 0.07s 0.525
Similar a la ltima expresin conseguida por otra tcnicas de identificacin de
sistemas y usadas en las prcticas de la asignatura.
Dpto. Electrnica, Automtica e Informtica Industrial 153
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
6.4 Problemas
Ejercicio 6.1
Dibujar aproximadamente, la respuesta al impulso, escaln y rampa del sistema
cuya FDT es:
Gs
1
s 10
Ejercicio 6.2
Dibujar la respuesta al escaln del sistema de:
2s
G( s)
s2
Ejercicio 6.3
La figura representa la respuesta al escaln de un sistema de FDT desconocida.
Obtener la respuesta del sistema ante una entrada en impulso:
Step Response
2
1.8
1.6
1.4
1.2
A
mp
litu 1
de
0.8
0.6
0.4
0.2
0
0 1 2 3 4 5 6
Time (sec)
Ejercicio 6.4
Dibujar aproximadamente la respuesta al escaln de los siguientes sistemas:
1 10
G1 ( s) G2 ( s )
s 1 s 10
154 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
1 s2
G3 ( s) G4 ( s )
s 1 s 1
2 2
G5 ( s) G6 ( s )
( s 1)(s 2) ( s 1)(s 2)
1 1
G7 ( s ) G8 ( s)
( s 1 j )(s 1 j ) ( s 1 j )( s 1 j )
1 1
G9 ( s) G10 ( s)
( s 1)
2
( s 1)
2
Ejercicio 6.5
El sistema de la figura est formado por 3 bloques de FDT desconocidos. En su
interior se ha representado la respuesta a diferentes entradas. Encuntrese la FDT del
sistema. Es estable el sistema resultante?. Cmo responder al escaln?.
Respuesta al impulso Respuesta al escaln
+ 1 2
- 1.27
t 2
Respuesta al escaln
Ejercicio 6.6
El equipo de prcticas de control de temperatura sobre una clula peltier tiene el
siguiente diagrama a bloques:
u Acond s
ucps i p s T s
Amplificador Transconductivo Acondicionamiento
Clula
100 mS V
10
Peltier K
20
Dpto. Electrnica, Automtica e Informtica Industrial 155
Captulo 6: Anlisis temporal de sistemas de 1er y 2 Apuntes de Regulacin
La dinmica de la Peltier es aproximado por:
T (t )
Pe (t ) CTH T (t )
RTH
Pe (t ) Tc 0 i p (t ) (linealizacin)
donde
ucp(t): tensin de control peltier
ip(t): corriente que circula por la Peltier
T(t)= Tc-Tf , Tctemperatura cara caliente
Tftemperatura cara fra
uACOND(t): tensin de salida proporcional a T(t)
Pe(t): potencia elctrica dada a la peltier
: coeficiente de Seebeck 0.003 V/K
Ante una entrada en escaln de 5V, la
respuesta es la dada por la figura. Considere que Re s pue s ta de l e quipo Pe ltie r a nte una e ntra da de 5V
7
la temperatura ambiente es de 20C.
Determinar: 6
a) FDT equivalente
4
(t) [V]
acond
b) Diagrama de bloques 3
u
2
c) Clculo de RTH y CTH
1
0
0 10 20 30 40 50 60 70 80
tie mpo [s ] (s e c )
Ejercicio 6.7
Dibujar la seal de salida ante una entrada en escaln unitario, para los
siguientes valores de k: a) 0.02; b) 0.125; c) 2.5, comparndolos en cuanto a tp, ts, Mp y
tr.
10
k
s(s+1)
156 Dpto. Electrnica, Automtica e Informtica Industrial
Apuntes de Regulacin Captulo 6: Anlisis temporal de sistemas de 1er y 2
Ejercicio 6.8
A un sistema que ante escaln unitario responde con y(t)=5-5e-t se le aade en
serie un integrador y se realimenta el conjunto unitaria y negativamente.
a) Obtener la respuesta impulsional del conjunto.
b) Dibujar la respuesta a una entrada en escaln de 3 unidades de amplitud.
Ejercicio 6.9
El sistema de la figura responde ante una aplicacin brusca de una fuerza de
20kg apartndose de su posicin de equilibrio como se indica a continuacin:
x(t)
k 20kg 9.5mm
M
0.1m
x(t)
B
2 s
Determinar M, B y k.
Derecho de Autor 2014 Carlos Platero Dueas.
Permiso para copiar, distribuir y/o modificar este documento bajo los trminos
de la Licencia de Documentacin Libre GNU, Versin 1.1 o cualquier otra
versin posterior publicada por la Free Software Foundation; sin secciones
invariantes, sin texto de la Cubierta Frontal, as como el texto de la Cubierta
Posterior. Una copia de la licencia es incluida en la seccin titulada "Licencia de
Documentacin Libre GNU".
La Licencia de documentacin libre GNU (GNU Free Documentation License)
es una licencia con copyleft para contenidos abiertos. Todos los contenidos de estos
apuntes estn cubiertos por esta licencia. La version 1.1 se encuentra en
http://www.gnu.org/copyleft/fdl.html. La traduccin (no oficial) al castellano de la
versin 1.1 se encuentra en http://www.es.gnu.org/Licencias/fdles.html
Dpto. Electrnica, Automtica e Informtica Industrial 157
También podría gustarte
- Mercantilismo en MexicoDocumento9 páginasMercantilismo en MexicoJose Emilio Bobadilla50% (2)
- Cromatografia Ionica Final2015Documento24 páginasCromatografia Ionica Final2015willdrummerAún no hay calificaciones
- Balance de Energía MecánicaDocumento25 páginasBalance de Energía MecánicawilldrummerAún no hay calificaciones
- Química I - Lumbreras PDFDocumento709 páginasQuímica I - Lumbreras PDFSilviaAún no hay calificaciones
- Balance de Energía MecánicaDocumento25 páginasBalance de Energía MecánicawilldrummerAún no hay calificaciones
- Sistemas Dinamicos de Orden SuperiorDocumento19 páginasSistemas Dinamicos de Orden SuperiorwilldrummerAún no hay calificaciones
- Método Colorimétrico para Cromo Expo para El SabadoDocumento24 páginasMétodo Colorimétrico para Cromo Expo para El SabadowilldrummerAún no hay calificaciones
- S1 SolDocumento12 páginasS1 SolSofía Burón Díez0% (2)
- Sistema Nacional de Programación Multianual y Gestión deDocumento22 páginasSistema Nacional de Programación Multianual y Gestión deAnonymous 4EI8FmAún no hay calificaciones
- La Economía Es Una Ciencia Social Que Se Ocupa Principalmente Del Estudio de La ProducciónDocumento6 páginasLa Economía Es Una Ciencia Social Que Se Ocupa Principalmente Del Estudio de La Producciónkie carreraAún no hay calificaciones
- 4.1 Algoritmo de DijkstraDocumento17 páginas4.1 Algoritmo de DijkstraJuan José Ricaldi MirandaAún no hay calificaciones
- Área de Una CuencaDocumento10 páginasÁrea de Una CuencaAlex Pablo Garay100% (1)
- De Los Albaceas o Ejecutores TestamentariosDocumento6 páginasDe Los Albaceas o Ejecutores TestamentariosALICIAAún no hay calificaciones
- Fallas en Juntas AtornilladasDocumento4 páginasFallas en Juntas AtornilladasCarito Morales100% (1)
- Tarea 7Documento8 páginasTarea 7Sara N FloresAún no hay calificaciones
- ZhouC DDocumento26 páginasZhouC DGastón Ezequiel CaballeroAún no hay calificaciones
- MD ArquitecturaDocumento13 páginasMD ArquitecturaArturodlp De la PuenteAún no hay calificaciones
- Blindobarras CATALOGO IPDocumento34 páginasBlindobarras CATALOGO IPSaid ArguelloAún no hay calificaciones
- Lock Out Tag OutDocumento21 páginasLock Out Tag OutAlejandra Calle PachecoAún no hay calificaciones
- Manual FreestyleoptiumDocumento26 páginasManual FreestyleoptiumDiaz M Milena D100% (1)
- Administración Fundamentos, Ciencias Auxiliares y Emprendedor-AdministradorDocumento52 páginasAdministración Fundamentos, Ciencias Auxiliares y Emprendedor-AdministradorARELY PEREZ URIBEAún no hay calificaciones
- Clase Distribución de PoissonDocumento10 páginasClase Distribución de PoissonChristian RamirezAún no hay calificaciones
- ML Construcciones CVDocumento11 páginasML Construcciones CVvictormachin46Aún no hay calificaciones
- Introduccion Al Manejo de Diales MecanicosDocumento39 páginasIntroduccion Al Manejo de Diales Mecanicoshoracio mesaAún no hay calificaciones
- Informe de Hallazgos FinanzasDocumento5 páginasInforme de Hallazgos FinanzasStefannie CoradoAún no hay calificaciones
- Guia MYSQL Y PHPDocumento15 páginasGuia MYSQL Y PHPjuanAún no hay calificaciones
- Manual Construccion Cultivadora Aporcadora ManualDocumento24 páginasManual Construccion Cultivadora Aporcadora ManualKlaus Pullchs100% (1)
- Lista de Maestros Por Énfasis para TrabajarDocumento8 páginasLista de Maestros Por Énfasis para TrabajarIng Jose Ramirez RubioAún no hay calificaciones
- CONSTRUCCIÓN DE PLANTA DE TRATAMIENTO DE AGUAS RESIDUALES (PTAR) PARA LA REAPERTURA DEL FRIGORÍFICO DE TIBANA-BOYACÁ, CON EL FIN DE MEJORAR EL SECTOR ECONÓMICO Y LA SALUBRIDAD, TANTO DEL MUNICIPIO MISMO COMO D.docxDocumento52 páginasCONSTRUCCIÓN DE PLANTA DE TRATAMIENTO DE AGUAS RESIDUALES (PTAR) PARA LA REAPERTURA DEL FRIGORÍFICO DE TIBANA-BOYACÁ, CON EL FIN DE MEJORAR EL SECTOR ECONÓMICO Y LA SALUBRIDAD, TANTO DEL MUNICIPIO MISMO COMO D.docxIvan RamírezAún no hay calificaciones
- EjercicioDocumento1 páginaEjercicioLuis Roberto HernandezAún no hay calificaciones
- Procedimiento No ContenciosoDocumento6 páginasProcedimiento No ContenciosoMiguel Ángel Ponce SánchezAún no hay calificaciones
- Guia de Modelación Hidráulica Diseño y Supervisión de Obras Del Sistema de Abastecimiento de Agua y Alcantarillado Final 1Documento14 páginasGuia de Modelación Hidráulica Diseño y Supervisión de Obras Del Sistema de Abastecimiento de Agua y Alcantarillado Final 1Fredy Allaucca OreAún no hay calificaciones
- Procedimiento Pts Aseo IndustrialDocumento25 páginasProcedimiento Pts Aseo IndustrialDenisse Herrera100% (1)
- Guia de Rodamientos NSKDocumento383 páginasGuia de Rodamientos NSKjuantrake100% (4)
- Identificacion Del Producto1Documento15 páginasIdentificacion Del Producto1Antonia Gallardo Colin100% (1)
- Wind Tree PDF 1.en - EsDocumento6 páginasWind Tree PDF 1.en - EsDany Joel A SAún no hay calificaciones
- Lecturas Juntas Ope 2022-2 - Aldair Quin 961881876Documento135 páginasLecturas Juntas Ope 2022-2 - Aldair Quin 961881876Arlet AvilaAún no hay calificaciones