También podría gustarte
- JkiuyDocumento8 páginasJkiuyfriitz cannsaayAún no hay calificaciones
- Curso Teorico de SonidoDocumento25 páginasCurso Teorico de SonidoAriel ChinoAún no hay calificaciones
- 2.-Teoría de La Informacion - Chaile Unidad 4Documento18 páginas2.-Teoría de La Informacion - Chaile Unidad 4jose ruizAún no hay calificaciones
- TrunkingDocumento4 páginasTrunkingNICOLAS DAVID MORALES GUTIERREZAún no hay calificaciones
- Sistema Operativo Irene!!!!Documento3 páginasSistema Operativo Irene!!!!dayana6espinosaAún no hay calificaciones
- Configuración Punto Acceso EquipoDocumento27 páginasConfiguración Punto Acceso EquipoitzelAún no hay calificaciones
- Manual Avanzado DMC-FZ38 PDFDocumento219 páginasManual Avanzado DMC-FZ38 PDFErmenguando Sousa Olivares100% (1)
- Informe Laboratorio (Filtro Pasa Bajos) - Sebastián Puerta, Juan Camilo Sabogal y Jorge GuzmánDocumento11 páginasInforme Laboratorio (Filtro Pasa Bajos) - Sebastián Puerta, Juan Camilo Sabogal y Jorge GuzmánSebastian PuertaAún no hay calificaciones
- Informe 4 Simulación: Voltajes y Corrientes en Circuitos TrifásicosDocumento4 páginasInforme 4 Simulación: Voltajes y Corrientes en Circuitos TrifásicosFerni_3rAún no hay calificaciones
- Fallas de SoftwareDocumento5 páginasFallas de Softwarejuan ricardoAún no hay calificaciones
- Técnico en Instalación y Reparación de Equipo de CómputoDocumento39 páginasTécnico en Instalación y Reparación de Equipo de Cómputodiegoandres495Aún no hay calificaciones
- Informe ECGDocumento8 páginasInforme ECGhopkeinstAún no hay calificaciones
- Circuitos 1 Agustin Ruezga Garcia y MarioDocumento12 páginasCircuitos 1 Agustin Ruezga Garcia y MarioAgustín Ruezga GarcíaAún no hay calificaciones
- Tipos Cable de Red y Categorías de Cables de Red - Apuntesjulio PDFDocumento13 páginasTipos Cable de Red y Categorías de Cables de Red - Apuntesjulio PDFAlexis Lara MenesesAún no hay calificaciones
- Equipos y Herramientas para CATVDocumento3 páginasEquipos y Herramientas para CATVGary Sänchez SalinasAún no hay calificaciones
- FPDocumento6 páginasFPibizaAún no hay calificaciones
- Circuitos en ProtoBoardDocumento8 páginasCircuitos en ProtoBoardJohan427Aún no hay calificaciones
- Pin PongDocumento5 páginasPin PongCamilo legardaAún no hay calificaciones
- Cuaderno de Informe Semana 3Documento9 páginasCuaderno de Informe Semana 3ronald roqueAún no hay calificaciones
- Herramientas Del Robotico PDFDocumento142 páginasHerramientas Del Robotico PDFJohnny Romero MiliánAún no hay calificaciones
- UnadDocumento14 páginasUnadFabian ZambranoAún no hay calificaciones
- Motores PVPDocumento2 páginasMotores PVPAnthony GldAún no hay calificaciones
- Manual de Instrucciones Velocimetro Sigma BC 1609 STSDocumento120 páginasManual de Instrucciones Velocimetro Sigma BC 1609 STSJosé María Gudín100% (1)
- Glosario de Términos Informáticos para Principiantes ConalepDocumento115 páginasGlosario de Términos Informáticos para Principiantes ConalepAnya González100% (1)
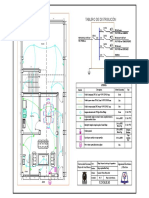
- Plano de Distribución - 1 NivelDocumento1 páginaPlano de Distribución - 1 NivelMax Fredi Quispe AguilarAún no hay calificaciones
- IE0308 GuiaExp1Documento3 páginasIE0308 GuiaExp1Bryan MendezAún no hay calificaciones
- Sistemas Digitales SecuencialesDocumento15 páginasSistemas Digitales SecuencialesOvanio MolinaAún no hay calificaciones
- 001 Intro 1Documento13 páginas001 Intro 1Wendy Carhuatanta CotosAún no hay calificaciones
- Medidor Caudal Rotativo Kobold DRGDocumento4 páginasMedidor Caudal Rotativo Kobold DRGBase SistemasAún no hay calificaciones
- Aeg He 10-20 Kva - User Manual EsDocumento56 páginasAeg He 10-20 Kva - User Manual EsomarAún no hay calificaciones