También podría gustarte
- Monografía Cinemática en Dos DimensionesDocumento8 páginasMonografía Cinemática en Dos DimensionesMatíasdelaFuenteAún no hay calificaciones
- Cuadrivectores PDFDocumento7 páginasCuadrivectores PDFMaría Angélica SemideyAún no hay calificaciones
- S05 PPT CinemáticaDocumento33 páginasS05 PPT CinemáticaJeysson Cruzado Arteaga100% (1)
- Coordenadas Normal y TangencialDocumento5 páginasCoordenadas Normal y TangencialFranklin PilcoAún no hay calificaciones
- Fi Sica Contempo Ran Eat 4Documento6 páginasFi Sica Contempo Ran Eat 4Alberto Ramirez100% (2)
- Análisis Del Movimiento CurvilíneoDocumento5 páginasAnálisis Del Movimiento CurvilíneoRicoy AcopaAún no hay calificaciones
- Mecanica RacionalDocumento42 páginasMecanica RacionalPablo B.Aún no hay calificaciones
- CinematicaDocumento15 páginasCinematicamartaguesanAún no hay calificaciones
- Cinematica de Una ParticulaDocumento7 páginasCinematica de Una ParticulaDavid EspinozaAún no hay calificaciones
- Tarea Fisica 1.5Documento10 páginasTarea Fisica 1.5AlbertoRamirezAún no hay calificaciones
- Guia 7 - MvtoCircularDocumento8 páginasGuia 7 - MvtoCircularSantiago Márquez AtehortúaAún no hay calificaciones
- Teoría - Cantidad de Movimiento AngularDocumento17 páginasTeoría - Cantidad de Movimiento AngularKristen MartinezAún no hay calificaciones
- Ayudantia Mov CircularDocumento4 páginasAyudantia Mov CircularSebastian lorca laraAún no hay calificaciones
- Vector Posicin Velocidad Aceleracin ResueltosDocumento10 páginasVector Posicin Velocidad Aceleracin ResueltosRuddy GonzaleaAún no hay calificaciones
- Guia 6 de Laboratorio de Fisica MecanicaDocumento9 páginasGuia 6 de Laboratorio de Fisica MecanicanelaAún no hay calificaciones
- Guion TiroparabolicoDocumento5 páginasGuion Tiroparabolicohasnakhalkhal2005Aún no hay calificaciones
- Aplicaciones de La DerivadaDocumento8 páginasAplicaciones de La DerivadaJORGE MELLADOAún no hay calificaciones
- Cinematica IEDocumento10 páginasCinematica IEvictor lebronAún no hay calificaciones
- N3 Fis1ptdDocumento46 páginasN3 Fis1ptdcarlos villalobosAún no hay calificaciones
- Movimiento CurvilíneoDocumento20 páginasMovimiento CurvilíneoLuis VilcaAún no hay calificaciones
- Apendice C Cinematica Sep 2018Documento23 páginasApendice C Cinematica Sep 2018Juan Nava XuriyaAún no hay calificaciones
- Laboratorio Nº3 (Velocidad Media, Velocidad Instantánea y Aceleración) 2Documento31 páginasLaboratorio Nº3 (Velocidad Media, Velocidad Instantánea y Aceleración) 2Lariza Reyes RincónAún no hay calificaciones
- La Derivada: 2.1. Dos Problemas Con El Mismo TemaDocumento25 páginasLa Derivada: 2.1. Dos Problemas Con El Mismo TemaALEJANDRO BENJAMIN SERRANO NAVARRETEAún no hay calificaciones
- Guia 3-Movimiento en Una DirecciónDocumento4 páginasGuia 3-Movimiento en Una DirecciónIvailo ApitzAún no hay calificaciones
- Cinematica Del PuntoDocumento104 páginasCinematica Del PuntoJharri E HuertoAún no hay calificaciones
- Guia - Ecuaciones Fundamentales de Mecánica de FluidosDocumento7 páginasGuia - Ecuaciones Fundamentales de Mecánica de FluidosXavier SalazarAún no hay calificaciones
- Lab Fis Tema 7 MRUV LaboratorioDocumento8 páginasLab Fis Tema 7 MRUV LaboratorioDaniel MaximilianAún no hay calificaciones
- Cinematic ADocumento8 páginasCinematic AJONMI 628Aún no hay calificaciones
- Movimiento en Una Dimensión - TeoríaDocumento12 páginasMovimiento en Una Dimensión - TeoríaJuanManuelBayonaArenasAún no hay calificaciones
- Sistemas de Coordenadas - Apunte - 2020Documento13 páginasSistemas de Coordenadas - Apunte - 2020Nicolás LópezAún no hay calificaciones
- 1.2) Mrua+ Problemas Caída LibreDocumento10 páginas1.2) Mrua+ Problemas Caída LibreÁlvaro Loyo MedieroAún no hay calificaciones
- CinemáticaDocumento29 páginasCinemáticaLireth Correa MurilloAún no hay calificaciones
- Formulario Física I (Vectores, Cinemática y 1° Ley de Newton)Documento6 páginasFormulario Física I (Vectores, Cinemática y 1° Ley de Newton)Palacios Hernández Carlos DanielAún no hay calificaciones
- Informe 2 Laboratorio Física 1Documento13 páginasInforme 2 Laboratorio Física 1farith.huaman.pAún no hay calificaciones
- Cinemática en 3 DimensionesDocumento10 páginasCinemática en 3 DimensionesLuis Alberto Orbegoso HuancaAún no hay calificaciones
- Cinematica 03Documento14 páginasCinematica 03marianoAún no hay calificaciones
- Cinematica PlanaDocumento9 páginasCinematica PlanacinttiaAún no hay calificaciones
- Mecanica Celeste 2020Documento4 páginasMecanica Celeste 2020Santiago Marti RodriguezAún no hay calificaciones
- Cinematica Particula Traslacion CurvilineaDocumento25 páginasCinematica Particula Traslacion Curvilineazeltaify100% (1)
- Presentacion y Actividades de Cinematic ADocumento44 páginasPresentacion y Actividades de Cinematic Ainggabriel20020% (1)
- DINAMICADocumento13 páginasDINAMICACarlos de la TorreAún no hay calificaciones
- Fuerza Centrifuga PDFDocumento9 páginasFuerza Centrifuga PDFWilson Augusto Cancino EspinozaAún no hay calificaciones
- Resoluciones de Ejercicios de Métodos NuméricosDocumento7 páginasResoluciones de Ejercicios de Métodos NuméricosAngel PeraltaAún no hay calificaciones
- Unidad 2-Funciones VectorialesDocumento21 páginasUnidad 2-Funciones Vectoriales《SIN- NOMBRE》Aún no hay calificaciones
- Tema 6Documento20 páginasTema 6Mortal ResiduoAún no hay calificaciones
- Relatividad 1Documento4 páginasRelatividad 1damurciaAún no hay calificaciones
- Cinematica FísicaDocumento13 páginasCinematica FísicaJuan ChoqueAún no hay calificaciones
- Postulados de Mecanica CuanticaDocumento20 páginasPostulados de Mecanica CuanticaRafael Angel LizaAún no hay calificaciones
- Cap 3 - Parte 2 - MRUVDocumento18 páginasCap 3 - Parte 2 - MRUVNeorgi O. GAún no hay calificaciones
- Edwin Seus Carreño ChavezDocumento11 páginasEdwin Seus Carreño ChavezYibel ChavezAún no hay calificaciones
- Fisica General Libro Completo4Documento10 páginasFisica General Libro Completo4franco432francol2321Aún no hay calificaciones
- Teoría Elemental de CamposDocumento6 páginasTeoría Elemental de CamposCharl013Aún no hay calificaciones
- Ecuaciones de Navier Stokes Flujo Lamiar - Segundo Avance PADocumento20 páginasEcuaciones de Navier Stokes Flujo Lamiar - Segundo Avance PAAnderson Guevara ChumioqueAún no hay calificaciones
- Movimiento CurvilíneoDocumento18 páginasMovimiento CurvilíneoAndresDiazRodriguezAún no hay calificaciones
- Problemas Dinamica de Cuerpo SolidoDocumento5 páginasProblemas Dinamica de Cuerpo SolidoLuis Perez MarquezAún no hay calificaciones
- 01 Cinemática de Una PartículaDocumento8 páginas01 Cinemática de Una PartículaRodrigo Monroy GutierrezAún no hay calificaciones
- Correlación cruzada: Desbloqueo de patrones en visión por computadoraDe EverandCorrelación cruzada: Desbloqueo de patrones en visión por computadoraAún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- Importancia de La Relación Entre La Organización y Su EntornoDocumento6 páginasImportancia de La Relación Entre La Organización y Su EntornoAnselmo RangelAún no hay calificaciones
- Unidad 2Documento22 páginasUnidad 2DX LancerAún no hay calificaciones
- Preguntas Reinado 2018Documento3 páginasPreguntas Reinado 2018Fernando Oficial AGAún no hay calificaciones
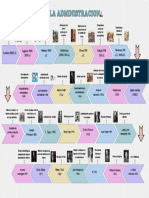
- Linea Del Tiempo de La AdministracionDocumento1 páginaLinea Del Tiempo de La AdministracionHernandz Ortiz Oscar OswaldoAún no hay calificaciones
- Organigrama-CES 2Documento1 páginaOrganigrama-CES 2kelly antelizAún no hay calificaciones
- Conceptos Básicos de Materiales PeligrososDocumento12 páginasConceptos Básicos de Materiales PeligrososRito J Alfonzo BAún no hay calificaciones
- Amparo Judicial Contra OsfatunDocumento18 páginasAmparo Judicial Contra OsfatunAHORAAún no hay calificaciones
- Catalogo de Productos VDocumento36 páginasCatalogo de Productos VGiovanni Lazaro100% (2)
- Bronco 3700 VDocumento32 páginasBronco 3700 VmorbarrafAún no hay calificaciones
- Algebra BooleanaDocumento40 páginasAlgebra BooleanaJulián Celis100% (2)
- Resumen OrganigramaDocumento35 páginasResumen OrganigramaRodrigo Triana Girón100% (2)
- Fuerzas - Equilibrio EstáticoDocumento4 páginasFuerzas - Equilibrio EstáticoProf. Ignacio CaggianoAún no hay calificaciones
- Carta de David TurbayDocumento3 páginasCarta de David TurbayW Radio ColombiaAún no hay calificaciones
- Actividad Dia Del HumanistaDocumento6 páginasActividad Dia Del Humanistamilton aucedaAún no hay calificaciones
- Lineamientos de Atención Victimas Sisbén FinalDocumento11 páginasLineamientos de Atención Victimas Sisbén FinalJUAN ROMEL MOJICAAún no hay calificaciones
- Las Emociones de Los PerrosDocumento2 páginasLas Emociones de Los PerrosLídia Claparols AsinsAún no hay calificaciones
- Babelia 945 020110Documento24 páginasBabelia 945 020110maxaub82100% (1)
- Tratamiento de Suelo Ado Con Hidrocarburos Electrobiorremediación Con Recirculación A Nivel Lab OratorioDocumento40 páginasTratamiento de Suelo Ado Con Hidrocarburos Electrobiorremediación Con Recirculación A Nivel Lab OratorioJagSergio50% (2)
- 2 Ecob,+459-474Documento16 páginas2 Ecob,+459-474jj garciaAún no hay calificaciones
- Produccion LiterariaDocumento3 páginasProduccion LiterariajmvaldebenitoAún no hay calificaciones
- NDB150417L33 Cfdi Bosk10329 20221218Documento1 páginaNDB150417L33 Cfdi Bosk10329 20221218Rene R RendonAún no hay calificaciones
- Taller CopasoDocumento12 páginasTaller CopasoDuglas MatizAún no hay calificaciones
- Mate 006Documento39 páginasMate 006yujra_jd0% (1)
- Algebra Lineal Actividad Semana 05Documento5 páginasAlgebra Lineal Actividad Semana 05miguelAún no hay calificaciones
- Notas y Tips de Estadistica InferencialDocumento2 páginasNotas y Tips de Estadistica InferencialDavid ÁlvarezAún no hay calificaciones
- 1317-Texto Del Artículo-3906-1-10-20190509Documento5 páginas1317-Texto Del Artículo-3906-1-10-20190509Johana RealAún no hay calificaciones
- Expediente Unico MultidisciplinarioDocumento12 páginasExpediente Unico MultidisciplinarioVíctor ManuelAún no hay calificaciones
- Libro Estrategia 2º Comprensión LectoraDocumento91 páginasLibro Estrategia 2º Comprensión LectoraPatricia Carolina Rozas100% (1)
- DragónDocumento5 páginasDragónJuan Pablo CasTellanosAún no hay calificaciones
- Febrero2023Documento2 páginasFebrero2023Jorge Ulises Ortiz BelliAún no hay calificaciones