También podría gustarte
- Cuestionario 2 ResolverDocumento5 páginasCuestionario 2 Resolverrandy bayasAún no hay calificaciones
- Nº 11 III Semestre El Transformador MonofásicoDocumento7 páginasNº 11 III Semestre El Transformador MonofásicoAbelardo Zcarias CardenasAún no hay calificaciones
- Arranque Por AutotransformadorDocumento38 páginasArranque Por AutotransformadorMarcelo Quirico67% (3)
- LABORATORIO No. 10 MEDICION DE ENERGIA Y FACTOR DE POTENCIADocumento3 páginasLABORATORIO No. 10 MEDICION DE ENERGIA Y FACTOR DE POTENCIAUberney AcevedoAún no hay calificaciones
- Por qué no se encuentran componentes de tercera armónicaDocumento5 páginasPor qué no se encuentran componentes de tercera armónicasteven wilsonAún no hay calificaciones
- Clasificación de Los Motores EléctricosDocumento42 páginasClasificación de Los Motores EléctricosElias SeguraAún no hay calificaciones
- SEP-Cuestionario 3Documento5 páginasSEP-Cuestionario 3geav25653855Aún no hay calificaciones
- Preguntas Motores Eléctricos PDFDocumento5 páginasPreguntas Motores Eléctricos PDFAlvaro DuraAún no hay calificaciones
- Cuestionario Motores InstalacionesDocumento8 páginasCuestionario Motores InstalacionesXavi Places83% (6)
- Objetivo GeneralDocumento4 páginasObjetivo GeneralQrogas JmeaAún no hay calificaciones
- Transformador RealDocumento6 páginasTransformador RealElton CalzadaAún no hay calificaciones
- Detalles sobre conexiones y construcción de transformadores monofásicosDocumento9 páginasDetalles sobre conexiones y construcción de transformadores monofásicosBelen Sin AcentoAún no hay calificaciones
- Laboratorio N°7 Maquinas CC.Documento19 páginasLaboratorio N°7 Maquinas CC.DanielAún no hay calificaciones
- Informe de Cojinetes de DeslizamientoDocumento6 páginasInforme de Cojinetes de DeslizamientoFerNando JlcAún no hay calificaciones
- Laboratorio Control IndustrialDocumento27 páginasLaboratorio Control Industrialrnystn2392Aún no hay calificaciones
- Semana 4 Bobinado de Motores de Fase PartidaDocumento37 páginasSemana 4 Bobinado de Motores de Fase PartidagiulianaAún no hay calificaciones
- Automatización Industrial Electroneumatica Ing. Eddy Perez Parte 1Documento30 páginasAutomatización Industrial Electroneumatica Ing. Eddy Perez Parte 1eddyAún no hay calificaciones
- Proyecto de TransformadorDocumento8 páginasProyecto de Transformadorandres iseda mirandaAún no hay calificaciones
- Manual para Motores de Corriente AlternaDocumento21 páginasManual para Motores de Corriente AlternaAldo Martin BustosAún no hay calificaciones
- INFORME Elementos de Proteccion ElectricaDocumento6 páginasINFORME Elementos de Proteccion ElectricaFRANK YUCRA100% (1)
- Metodo Del RelojDocumento13 páginasMetodo Del RelojLuis Alberto Huancollo Coaquira100% (1)
- IntroducciónDocumento2 páginasIntroducciónJersón Keler Toribio BedonAún no hay calificaciones
- Principio de Funcionamiento de Las Máquinas de Corriente ContinúasDocumento6 páginasPrincipio de Funcionamiento de Las Máquinas de Corriente ContinúasYeferson RodriguezAún no hay calificaciones
- Voltaje en El EcuadorDocumento11 páginasVoltaje en El EcuadorRaul Chavez RomeroAún no hay calificaciones
- Mantenimiento de Máquinas Eléctricas RotativasDocumento32 páginasMantenimiento de Máquinas Eléctricas RotativasMartin Lili CobosAún no hay calificaciones
- Circuitos magnéticos: análisis de reluctancia, flujo e inductanciaDocumento7 páginasCircuitos magnéticos: análisis de reluctancia, flujo e inductanciaRey De ReyesAún no hay calificaciones
- Informe TécnicoDocumento66 páginasInforme TécnicoEmmanuelBarriosAún no hay calificaciones
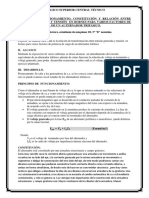
- Alternador Trifásico, PRINCIPIO DE FUNCIONAMIENTO, CONSTITUCIÓN Y RELACIÓN ENTRE TENSIÓN GENERADA Y TENSIÓN EN BORNES PARA VARIOS FACTORES DE POTENCIA DE CARGA DE UN ALTERNADOR TRIFÁSICO.Documento4 páginasAlternador Trifásico, PRINCIPIO DE FUNCIONAMIENTO, CONSTITUCIÓN Y RELACIÓN ENTRE TENSIÓN GENERADA Y TENSIÓN EN BORNES PARA VARIOS FACTORES DE POTENCIA DE CARGA DE UN ALTERNADOR TRIFÁSICO.Georddy HerreraAún no hay calificaciones
- Ensayo De: Electricidad Inalámbrica.Documento8 páginasEnsayo De: Electricidad Inalámbrica.Nairobi Gonzalez de JesusAún no hay calificaciones
- Laboratori III El MegohmetroDocumento3 páginasLaboratori III El MegohmetroDaniel PeñaAún no hay calificaciones
- Informe Maquinas y EquiposDocumento6 páginasInforme Maquinas y EquiposBreittnerRoJas100% (1)
- Presentación Transformador de PotenciaDocumento13 páginasPresentación Transformador de PotenciaJose Arley Arias CarreteroAún no hay calificaciones
- Evolución de la industria eléctrica en el Perú desde sus inicios hasta la reforma del sectorDocumento7 páginasEvolución de la industria eléctrica en el Perú desde sus inicios hasta la reforma del sectorWalter TocraAún no hay calificaciones
- Diagrama Unifilar Cotopaxi 7 2Documento7 páginasDiagrama Unifilar Cotopaxi 7 2AlexanderPilamunga100% (1)
- Informe Maquinas 003 Formato IEEEDocumento5 páginasInforme Maquinas 003 Formato IEEEJohn De La OssaAún no hay calificaciones
- Autotransformador y Trafo Tridevanado 10-10-2013 Serrano LinaresDocumento3 páginasAutotransformador y Trafo Tridevanado 10-10-2013 Serrano LinaresLuis PerdomoAún no hay calificaciones
- Elementos Basicos para El Analisis de Los Sistemas de PotenciaDocumento22 páginasElementos Basicos para El Analisis de Los Sistemas de Potenciael_ruso__83100% (1)
- Diseño de un Transformador MonofásicoDocumento8 páginasDiseño de un Transformador MonofásicoAlberto GuillenAún no hay calificaciones
- Motores y generadores CD: diferencias y funcionamientoDocumento4 páginasMotores y generadores CD: diferencias y funcionamientoGerardo GutierrezAún no hay calificaciones
- Motores síncronos: definición, características y usosDocumento12 páginasMotores síncronos: definición, características y usosCecy CasteloAún no hay calificaciones
- Sistemas de Energías Alternativas UNHDocumento21 páginasSistemas de Energías Alternativas UNHrosario gutierrez olivaresAún no hay calificaciones
- Actividad N 5 Electricidad Taller Complementario Ley de Ohm y WattDocumento22 páginasActividad N 5 Electricidad Taller Complementario Ley de Ohm y Wattdaniela garcia100% (1)
- Motor DahlanderDocumento7 páginasMotor DahlanderChristian G MoralesAún no hay calificaciones
- Laboratorio 5, Generador Sincronico en VacioDocumento10 páginasLaboratorio 5, Generador Sincronico en VacioJhon Rosas100% (1)
- Actividad De, TransformadoresDocumento4 páginasActividad De, TransformadoresBRAYAN MAURICIO CASALLASAún no hay calificaciones
- Sesion 1Documento9 páginasSesion 1LUIS FERNANDO FERNANDEZ YEPEZAún no hay calificaciones
- Capitulo 08 - Aislamientos de Las Maquinas ElectricasDocumento34 páginasCapitulo 08 - Aislamientos de Las Maquinas ElectricaskriscarriTvAún no hay calificaciones
- Capacitores en Instalaciones Electricas de Baja TensionDocumento4 páginasCapacitores en Instalaciones Electricas de Baja TensionIee Jimmy Zambrano LAún no hay calificaciones
- San NicolasDocumento13 páginasSan NicolasJmLg216Aún no hay calificaciones
- Medir magnitudes eléctricas con voltímetros y amperímetrosDocumento4 páginasMedir magnitudes eléctricas con voltímetros y amperímetrosAmneris Adriana VelàsquezAún no hay calificaciones
- Proyecto. Anthony PM. B75857Documento7 páginasProyecto. Anthony PM. B75857Anthony Piedra MedinaAún no hay calificaciones
- Contro de Luminaria Desde Dos PuntosDocumento18 páginasContro de Luminaria Desde Dos PuntosWilber ChavezAún no hay calificaciones
- PRACTICA No.10 Eficiencia Del Motor de InducciónDocumento3 páginasPRACTICA No.10 Eficiencia Del Motor de InducciónMauro LozAún no hay calificaciones
- Sincronización generadores eléctricosDocumento5 páginasSincronización generadores eléctricosDairo Ruiz-LogreiraAún no hay calificaciones
- Generador y motor síncronoDocumento37 páginasGenerador y motor síncronoJuan Quispe CubaAún no hay calificaciones
- Informe Del Sector Electrico EcuatorianoDocumento9 páginasInforme Del Sector Electrico EcuatorianoRicardo PeñalozaAún no hay calificaciones
- Conceptos - Maquinas ElectricasDocumento16 páginasConceptos - Maquinas ElectricasJulio100% (1)
- Introducción A Las Máquinas EléctricasDocumento5 páginasIntroducción A Las Máquinas EléctricasBrayan Granados CárdenasAún no hay calificaciones
- Caracteristicas de Las Maquinas ElectricasDocumento21 páginasCaracteristicas de Las Maquinas ElectricasCristhian PonceAún no hay calificaciones
- Trabajo EncargadoDocumento57 páginasTrabajo EncargadoJavier ChaiñaAún no hay calificaciones
- Informe Cualitativo 3105 2019Documento1 páginaInforme Cualitativo 3105 2019Lucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Hoja de Concepto ProfesionalDocumento1 páginaHoja de Concepto ProfesionalRicardoEscobarAún no hay calificaciones
- Organización Ferias Eventos ArtesaníasDocumento9 páginasOrganización Ferias Eventos ArtesaníasLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Acto 20 de JunioDocumento2 páginasActo 20 de JunioLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Registro Villa 2019Documento7 páginasRegistro Villa 2019Lucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Inet Apa APBDocumento11 páginasInet Apa APBLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Acto Despedida de JubiladaDocumento5 páginasActo Despedida de JubiladaLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Planilla de Control 2019 (Llena) - EET #3105Documento120 páginasPlanilla de Control 2019 (Llena) - EET #3105Lucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Muestra Anual de PPT IIDocumento2 páginasMuestra Anual de PPT IILucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Despedida Teresa y CarlosDocumento3 páginasDespedida Teresa y CarlosLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- La Muerte Del Héroe, PoemaDocumento2 páginasLa Muerte Del Héroe, PoemaLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Guía para organizar eventos y ferias de artesaníasDocumento40 páginasGuía para organizar eventos y ferias de artesaníasLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Proyecto ABP MostrándonosDocumento1 páginaProyecto ABP MostrándonosLucrecia Monica Rodriguez Zubieta100% (1)
- Pauta - 1 Rodriguez ZubietaDocumento1 páginaPauta - 1 Rodriguez ZubietaLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Carpeta Cordoba2018Documento31 páginasCarpeta Cordoba2018Lucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Aprendizaje Basado en ProyectosDocumento2 páginasAprendizaje Basado en ProyectosLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Carpeta Cordoba2018Documento31 páginasCarpeta Cordoba2018Lucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Aprendizaje Basado en ProyectosDocumento2 páginasAprendizaje Basado en ProyectosLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Estandares y Proceso de Pre Produccion. Gabriel Farias IribarrenDocumento46 páginasEstandares y Proceso de Pre Produccion. Gabriel Farias IribarrenZarela RamosAún no hay calificaciones
- Inscripcion 187 2019-02-25 PDFDocumento1 páginaInscripcion 187 2019-02-25 PDFLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- CPP DC Torres Santome Las Razones Del CurriculumDocumento53 páginasCPP DC Torres Santome Las Razones Del CurriculumCamil SorhaburuAún no hay calificaciones
- Descripción Del Producto para JuniorDocumento2 páginasDescripción Del Producto para JuniorLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Guía de EstudioDocumento1 páginaGuía de EstudioLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Ferias y EventosDocumento9 páginasFerias y EventosLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Acto de San Martín 1Documento4 páginasActo de San Martín 1Lucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Cronograma Practica Docente 2Documento4 páginasCronograma Practica Docente 2Lucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Bioética Y Genómica: José Alberto MainettiDocumento8 páginasBioética Y Genómica: José Alberto MainettiLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Familiares A Cargo PlanillaDocumento2 páginasFamiliares A Cargo PlanillaLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Curso diseño tejido industrialDocumento9 páginasCurso diseño tejido industrialLucrecia Monica Rodriguez ZubietaAún no hay calificaciones
- Taller de Refuerzo NATURALES PRIMER PERIODODocumento3 páginasTaller de Refuerzo NATURALES PRIMER PERIODOcamilo rodriguezAún no hay calificaciones
- Plan Anual de Tutoría de AulaDocumento4 páginasPlan Anual de Tutoría de AulaMaria Tuero LlazaAún no hay calificaciones
- ALTERACIONES Hormona de CrecimientoDocumento16 páginasALTERACIONES Hormona de CrecimientoLysseth Paucarchuco Gutierrez100% (1)
- Terapia GersonDocumento38 páginasTerapia Gersonfreemancrow90% (10)
- Electrocauterizacion Estetica PravicDocumento20 páginasElectrocauterizacion Estetica PravicclauestefAún no hay calificaciones
- Caso Clinico Cirrosis HepaticaDocumento9 páginasCaso Clinico Cirrosis HepaticaJoel BurgosAún no hay calificaciones
- Teoría del desarrollo cognitivo de Piaget: estadios y pruebas PiagetanasDocumento93 páginasTeoría del desarrollo cognitivo de Piaget: estadios y pruebas PiagetanasJaviera IglesisAún no hay calificaciones
- Estados de ShokDocumento12 páginasEstados de ShokRoach SkarAún no hay calificaciones
- Antropología Filosófica: Introducción al Estudio del Ser HumanoDocumento22 páginasAntropología Filosófica: Introducción al Estudio del Ser Humanoscholasticus2Aún no hay calificaciones
- EPT-EMP-C6-Sesión 1Documento4 páginasEPT-EMP-C6-Sesión 1Elizabeth Gutierrez Huamani100% (2)
- Terapia Auditiva Verbal IDocumento34 páginasTerapia Auditiva Verbal IValentina Arriagada CorralesAún no hay calificaciones
- Capitulo 3Documento7 páginasCapitulo 3monicaAún no hay calificaciones
- PRG Teatro 1 - 2020 WEBDocumento59 páginasPRG Teatro 1 - 2020 WEBsethAún no hay calificaciones
- Psicología Evolutiva Adolescencia Cátedra IIDocumento2 páginasPsicología Evolutiva Adolescencia Cátedra IIBiblioteca EAMAún no hay calificaciones
- Funciones Sociales de La EducaciónDocumento12 páginasFunciones Sociales de La EducaciónMatiasAún no hay calificaciones
- Raz. Verbal 3ero Sec - T1 PDFDocumento4 páginasRaz. Verbal 3ero Sec - T1 PDFFranchesco mendozaAún no hay calificaciones
- Matriz de Competencias, Capacidades, Estándares y Desempeños Con Colores 2018 PrimariaDocumento63 páginasMatriz de Competencias, Capacidades, Estándares y Desempeños Con Colores 2018 PrimariaJenny Trujillo PiñaAún no hay calificaciones
- Tarea Semana 4 TeoriasDocumento5 páginasTarea Semana 4 TeoriasAbigail ChidoriAún no hay calificaciones
- Taller EJE 2 Catedra Pablo Oliveros MarmolejoDocumento9 páginasTaller EJE 2 Catedra Pablo Oliveros Marmolejooscar amayaAún no hay calificaciones
- Secundarias LeónDocumento21 páginasSecundarias LeónESTEFANIAAún no hay calificaciones
- Programa Seminario Pensamiento Nacional y LatinoamericanoDocumento9 páginasPrograma Seminario Pensamiento Nacional y Latinoamericanopeofe.taddio23Aún no hay calificaciones
- Sistema DigestivoDocumento3 páginasSistema DigestivoAlan YatacoAún no hay calificaciones
- Metodología Investigación SocialDocumento6 páginasMetodología Investigación SocialRUBEN100% (1)
- 13 Leng - Sesión 13-Vicios de Redacción-Locove-Usmp-2019 IDocumento21 páginas13 Leng - Sesión 13-Vicios de Redacción-Locove-Usmp-2019 ISergio Contreras RomeroAún no hay calificaciones
- Examen Unidad 3 Regimen FiscalDocumento7 páginasExamen Unidad 3 Regimen FiscalmariafAún no hay calificaciones
- Guia 3 Tecnicas de ConteoDocumento32 páginasGuia 3 Tecnicas de ConteoJair RamirezAún no hay calificaciones
- IntroduccionDocumento3 páginasIntroduccionElmer Jossue Caucha SondorAún no hay calificaciones
- 5 Criptosporosis y CiclosporosisDocumento6 páginas5 Criptosporosis y CiclosporosisANA MARIA TORRES LUNAAún no hay calificaciones
- MA PA 001 Manejo de Derrames Ver04Documento8 páginasMA PA 001 Manejo de Derrames Ver04Daniel Vidarte BravoAún no hay calificaciones
- CÓMO SER UN BUEN ESTUDIANTE EN LÍNEA Mapa ConceptualDocumento1 páginaCÓMO SER UN BUEN ESTUDIANTE EN LÍNEA Mapa ConceptualEsthela FloresAún no hay calificaciones