También podría gustarte
- RSE y Modelo PESTEL BancolombiaDocumento40 páginasRSE y Modelo PESTEL BancolombiaOrfiliaAún no hay calificaciones
- Practico 2Documento39 páginasPractico 2Ronny R CabanaAún no hay calificaciones
- Informe SoDocumento12 páginasInforme SoLuis Fernando Villacres ArmasAún no hay calificaciones
- Temario DPWDocumento2 páginasTemario DPWCarlos WayneAún no hay calificaciones
- Renovación Aeropuerto El EdénDocumento25 páginasRenovación Aeropuerto El EdénJohana SarmientoAún no hay calificaciones
- Normas de Auditoria TributariaDocumento13 páginasNormas de Auditoria TributariaBELLA PRISCILA HERNANDEZ MONCADAAún no hay calificaciones
- F4415 Las Delicias Ltda 4°ADocumento3 páginasF4415 Las Delicias Ltda 4°AMoises Aguilera MartinezAún no hay calificaciones
- Agreement y Disagreement.Documento11 páginasAgreement y Disagreement.unknowncountdown167Aún no hay calificaciones
- Sesion 1ro SecDocumento3 páginasSesion 1ro Secmarlo sislaAún no hay calificaciones
- Resumen Primer Parcial PDFDocumento11 páginasResumen Primer Parcial PDFJuan Diego Amaya SaenzAún no hay calificaciones
- S3.2 - PPT - Inecuaciones Lineales y CuadráticasDocumento30 páginasS3.2 - PPT - Inecuaciones Lineales y CuadráticasBruno OjedaAún no hay calificaciones
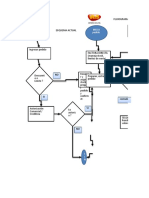
- FlujogramaDocumento2 páginasFlujogramaJazmin SánchezAún no hay calificaciones
- Tarea 6 FMHDocumento5 páginasTarea 6 FMHEsteban Lagos Koppmann100% (1)
- Administracion de Empresas y Administracion Por CompetenciasDocumento30 páginasAdministracion de Empresas y Administracion Por CompetenciasCARLOS DANIEL CASTILLO INGAAún no hay calificaciones
- Manual de Analisis y Reparacion de Teach Pendant PDFDocumento17 páginasManual de Analisis y Reparacion de Teach Pendant PDFjavier100% (1)
- Examen Geografia e HistoriaDocumento2 páginasExamen Geografia e HistoriaESTHER100% (1)
- Villanueva Villanueva PaoloDocumento2 páginasVillanueva Villanueva PaoloPaolo VillanuevaAún no hay calificaciones
- Enfermedades Laborales Asociadas Al Sistema NerviosoDocumento12 páginasEnfermedades Laborales Asociadas Al Sistema NerviosoRicardo HerreraAún no hay calificaciones
- Metodos Cuantitativos para Los NegociosDocumento204 páginasMetodos Cuantitativos para Los NegociosJuan Pablo Cano Mejia71% (7)
- Planes Actualizado 20042021 2.0Documento2 páginasPlanes Actualizado 20042021 2.0MARIA FERNANDA RODRIGUEZ RAMIREZAún no hay calificaciones
- Monografia - Mercado LaboralDocumento8 páginasMonografia - Mercado LaboralJuan Zap TeroAún no hay calificaciones
- Cadena de SuninistroDocumento2 páginasCadena de SuninistroMagaly GarciaAún no hay calificaciones
- Contrato Rita SiegelDocumento6 páginasContrato Rita SiegelLarissa ChagasAún no hay calificaciones
- Proyecto-Final DE CARRETERASDocumento17 páginasProyecto-Final DE CARRETERASJulio Carlos CondoriAún no hay calificaciones
- Ficha Cuenta EjecutivaDocumento3 páginasFicha Cuenta EjecutivaIrving GarciaAún no hay calificaciones
- Estructura Del Proyecto de TesisDocumento23 páginasEstructura Del Proyecto de TesisNicol VelezmoroAún no hay calificaciones
- Equipos Perforac - Im140ami 2017 IIDocumento166 páginasEquipos Perforac - Im140ami 2017 IICarolaimHerreraVillafuerteAún no hay calificaciones
- Caso IV La ComisionDocumento2 páginasCaso IV La ComisionStefaniNovoaAún no hay calificaciones
- Bebidas Alcohólicas - Viche Sep 2023Documento37 páginasBebidas Alcohólicas - Viche Sep 2023ing.alimentosmiguelmurciaAún no hay calificaciones
- Analisis de Las 5 Fuerzas de Poder de Porter AgvDocumento12 páginasAnalisis de Las 5 Fuerzas de Poder de Porter AgvAngelAún no hay calificaciones