También podría gustarte
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Instalaciones Industriales 3Documento108 páginasInstalaciones Industriales 3Jaime Ramirez CastroAún no hay calificaciones
- Corriente DirectaDocumento13 páginasCorriente Directalil choloAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasAún no hay calificaciones
- Tipos de MotoresDocumento28 páginasTipos de MotoresAngel ArvizuAún no hay calificaciones
- Catálogo General NTNDocumento436 páginasCatálogo General NTNapi-383347696% (24)
- Isa RepDocumento59 páginasIsa Repermap100% (1)
- S-Neveras Domesticas 213-228.unlocked PDFDocumento16 páginasS-Neveras Domesticas 213-228.unlocked PDFMarcos R. Hernández M.Aún no hay calificaciones
- Motores de Corriente AlternaDocumento11 páginasMotores de Corriente Alternamaanmoga21Aún no hay calificaciones
- Tema 41 - Sistemas ReguladosDocumento15 páginasTema 41 - Sistemas ReguladosDavidMartinezAlloAún no hay calificaciones
- Arranque de Motores Asíncronos TrifásicosDocumento10 páginasArranque de Motores Asíncronos TrifásicosAlbert Martinez100% (1)
- Motores de Corriente AlternaDocumento8 páginasMotores de Corriente AlternaFranco BustamanteAún no hay calificaciones
- Inel - Diseño y Selección de Transformadores de PotenciaDocumento74 páginasInel - Diseño y Selección de Transformadores de Potenciachris100% (1)
- U2-1 COMPONENTES SIMÉTRICAS - Mallas de SecuenciaDocumento38 páginasU2-1 COMPONENTES SIMÉTRICAS - Mallas de SecuenciaMiguel Ln100% (2)
- Capítulo 6 Control Del Voltaje y La FrecuenciaDocumento43 páginasCapítulo 6 Control Del Voltaje y La FrecuenciaBruno SamosAún no hay calificaciones
- 555Documento22 páginas555Eyvar Trejo GarridoAún no hay calificaciones
- Alecop 03 ELECTROTECNIA PDFDocumento20 páginasAlecop 03 ELECTROTECNIA PDFjulian_a_aAún no hay calificaciones
- Motores Monofasicos de Fase PartidaDocumento31 páginasMotores Monofasicos de Fase PartidaGiovanni HFAún no hay calificaciones
- U4 Motores de InducciónDocumento21 páginasU4 Motores de InducciónVictor Eduardo Alor Castillo100% (1)
- Capítulo 6 Circuitos de Corriente AlternaDocumento44 páginasCapítulo 6 Circuitos de Corriente AlternaA Liz Marjorie T. TineoAún no hay calificaciones
- Eduardo Cortes M54 T1 CP1 IldefonsoJiménezAlcalaDocumento10 páginasEduardo Cortes M54 T1 CP1 IldefonsoJiménezAlcalaLalo Cortes EspinosaAún no hay calificaciones
- Extracción Segura de RodamientosDocumento38 páginasExtracción Segura de RodamientosJesus Alberto Villadiego PeñaAún no hay calificaciones
- Construccion Motor Trifasico InduccionDocumento10 páginasConstruccion Motor Trifasico InduccionRodrigo PerezAún no hay calificaciones
- Rubrica LAB 6Documento18 páginasRubrica LAB 6Lincoln Ruiz Damian100% (1)
- Aerogenerador VerticalDocumento3 páginasAerogenerador VerticalSebastian GranadosAún no hay calificaciones
- RELEVADORES PresentaciónDocumento26 páginasRELEVADORES PresentaciónSanchezAún no hay calificaciones
- Capitulo1-Principio de Funcionamiento de Celdas de Combustible PDFDocumento15 páginasCapitulo1-Principio de Funcionamiento de Celdas de Combustible PDFjcrodriguez83Aún no hay calificaciones
- Introduccion Al Autómata Programable PLC: Universidad de Costa Rica Facultad de IngenieríaDocumento53 páginasIntroduccion Al Autómata Programable PLC: Universidad de Costa Rica Facultad de IngenieríaPedro Arias VasnegasAún no hay calificaciones
- Resistores, Capacitores e InductoresDocumento20 páginasResistores, Capacitores e InductoresCarlos V. Castro100% (1)
- Electricidad BasicaDocumento3 páginasElectricidad BasicaDiego Chávez Samaniego100% (1)
- Tipos de Motores Eléctricos en La IndustriaDocumento4 páginasTipos de Motores Eléctricos en La IndustriaRicardo Vergara MuñozAún no hay calificaciones
- Uso MeggerDocumento2 páginasUso Meggeraris09yekofAún no hay calificaciones
- Arranque de Motores de InducciónDocumento8 páginasArranque de Motores de InducciónelkmaleonAún no hay calificaciones
- MAQUINAS TERMICAS - Apuntes PDFDocumento26 páginasMAQUINAS TERMICAS - Apuntes PDFerrol meza menaAún no hay calificaciones
- Cómo Conectar Un Rele Amperímetrico 2018Documento3 páginasCómo Conectar Un Rele Amperímetrico 2018Hector Marcelo FernandezAún no hay calificaciones
- Ejercicios Tema 2.ADocumento2 páginasEjercicios Tema 2.AMaria planellerAún no hay calificaciones
- 1 Automatismos Electricos PDFDocumento22 páginas1 Automatismos Electricos PDFErika PilataxiAún no hay calificaciones
- Ciclos Termodinamicos PDFDocumento4 páginasCiclos Termodinamicos PDFAle LunaAún no hay calificaciones
- Trabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoDocumento46 páginasTrabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoWalter Jesus100% (1)
- PREGUNTAS Motores EléctricosDocumento2 páginasPREGUNTAS Motores EléctricosArturo David Ubaldo HerreraAún no hay calificaciones
- UT 1 Cap1 Conceptos Basicos PDFDocumento35 páginasUT 1 Cap1 Conceptos Basicos PDFViktor StarkAún no hay calificaciones
- Unidad 1 Generadores de Corriente DirectaDocumento36 páginasUnidad 1 Generadores de Corriente DirectaAlex MeloAún no hay calificaciones
- LIBRO Problemas Resueltos de Electronica Analogica Juan Jose Galiana Juan Jose Martinez EsplaDocumento6 páginasLIBRO Problemas Resueltos de Electronica Analogica Juan Jose Galiana Juan Jose Martinez EsplaEnrique MartinezAún no hay calificaciones
- Practica Estrella TrianguloDocumento7 páginasPractica Estrella TrianguloalandeakerAún no hay calificaciones
- MME 22 Ejercicios Automatismos CableadosDocumento1 páginaMME 22 Ejercicios Automatismos CableadoscontubiciAún no hay calificaciones
- Calculo de Instalacion Industrial - ComercialDocumento73 páginasCalculo de Instalacion Industrial - ComercialIsrael Josue100% (1)
- Refrigeracion y Aire AcondicionadoDocumento19 páginasRefrigeracion y Aire AcondicionadocaprionAún no hay calificaciones
- Semana 1 - ContactoresDocumento69 páginasSemana 1 - Contactoresguillermo_f_4Aún no hay calificaciones
- Planificación Anual Taller Electrico PrimeroDocumento3 páginasPlanificación Anual Taller Electrico Primeroomar100% (1)
- Filtro Deshidratador. Reemplazo: Capítulo 1Documento37 páginasFiltro Deshidratador. Reemplazo: Capítulo 1Jon HelioAún no hay calificaciones
- Practica de TriacDocumento9 páginasPractica de TriacLizz CardenasAún no hay calificaciones
- Diagrama de MoellerDocumento3 páginasDiagrama de MoellerLuis Fernando BelloAún no hay calificaciones
- Apuntes - Metrologia - 2015 03 11 396Documento39 páginasApuntes - Metrologia - 2015 03 11 396Marcelo MamaniAún no hay calificaciones
- Bancos de CondensadoresDocumento3 páginasBancos de CondensadoresNiltonGonzalesAún no hay calificaciones
- Arranque de Motores Estrella TrianguloDocumento3 páginasArranque de Motores Estrella TrianguloshenseyAún no hay calificaciones
- Control Automatico Circuitos RLCDocumento200 páginasControl Automatico Circuitos RLCKevin PachecoAún no hay calificaciones
- La97712781 PDFDocumento78 páginasLa97712781 PDFJavier Eduardo ArguelloAún no hay calificaciones
- Eleccion de Un ContactorDocumento6 páginasEleccion de Un ContactorJosé Luis Vásquez Silva100% (15)
- Practica # 1Documento8 páginasPractica # 1Cristhian Rolando Gaona QuezadaAún no hay calificaciones
- Unidad 3 Arrancadores para Motores de Corriente Alterna TrifasicosDocumento31 páginasUnidad 3 Arrancadores para Motores de Corriente Alterna TrifasicosG Jean Manuel Alexandroo100% (1)
- Unidad 3 Arrancadores para Motores de Corriente Alterna Trifc3a1sicosDocumento31 páginasUnidad 3 Arrancadores para Motores de Corriente Alterna Trifc3a1sicosAlonso Herrera AguilarAún no hay calificaciones
- Motores ElectricosDocumento34 páginasMotores ElectricosITALO DAVID INTE SANTAFEAún no hay calificaciones
- EQUIPO 2. Motor de Corriente Alterna (Motor Síncrono)Documento26 páginasEQUIPO 2. Motor de Corriente Alterna (Motor Síncrono)Emilio Pineda ReyesAún no hay calificaciones
- Ut3.5.-Motor Asincrono o de InduccionDocumento15 páginasUt3.5.-Motor Asincrono o de InduccionJuanjoAún no hay calificaciones
- Informe Motor Jaula Ardilla-1Documento9 páginasInforme Motor Jaula Ardilla-1Kevin Muyón RiveraAún no hay calificaciones
- Informe Motor Jaula Ardilla-1Documento9 páginasInforme Motor Jaula Ardilla-1Kevin Muyón RiveraAún no hay calificaciones
- Informe 8 Motor de Induccion de Rotor BobinadoDocumento6 páginasInforme 8 Motor de Induccion de Rotor BobinadoGuillermo AQxpz100% (1)
- Motores de Corriente AlternaDocumento9 páginasMotores de Corriente Alternacristianespinola9Aún no hay calificaciones
- Calculo de Velocidades de Piston y CaudalDocumento47 páginasCalculo de Velocidades de Piston y CaudalWalter Sarango0% (1)
- Composicion Optima Arena FundicionDocumento184 páginasComposicion Optima Arena FundicionPaco RotenAún no hay calificaciones
- CadenaDocumento5 páginasCadenaantonyoxAún no hay calificaciones
- Ion Por Moldeo I - Cristobal de MonroyDocumento8 páginasIon Por Moldeo I - Cristobal de Monroyantoniogh2Aún no hay calificaciones
- Capitulo 2 Introduccion A Las LevasDocumento16 páginasCapitulo 2 Introduccion A Las Levasantonyox100% (1)
- Semana 06 Arranque de Un Motor de Inducción 1Ø Con Capacitor y La InversiónDocumento75 páginasSemana 06 Arranque de Un Motor de Inducción 1Ø Con Capacitor y La InversiónYordi Ramos CaveroAún no hay calificaciones
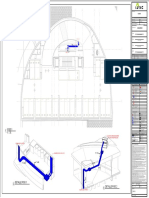
- Aluna - Comunicaciones-Piso 1Documento1 páginaAluna - Comunicaciones-Piso 1julianAún no hay calificaciones
- Informe Generador Sincrono-Maquinas IIDocumento13 páginasInforme Generador Sincrono-Maquinas IIEnrique Rivera Santos100% (2)
- Plantilla D Eluces de EmergenciaDocumento2 páginasPlantilla D Eluces de EmergenciaPresly QuiAún no hay calificaciones
- Resumen EjecutivoDocumento54 páginasResumen EjecutivoMagdiel Chiok NoblejasAún no hay calificaciones
- Cálculo de Líneas y Redes Eléctricas: Ramón M. MujalDocumento271 páginasCálculo de Líneas y Redes Eléctricas: Ramón M. Mujalnaiara garciaAún no hay calificaciones
- Arranque Motor SincronoDocumento6 páginasArranque Motor SincronoPaul Guillen PeñarretaAún no hay calificaciones
- El Convertidor Boost IndustrialDocumento5 páginasEl Convertidor Boost IndustrialJoselyn Rosario SincheAún no hay calificaciones
- Informe Fuerza ElectromotrizDocumento16 páginasInforme Fuerza ElectromotrizHenry RiveraAún no hay calificaciones
- Anexo 1 Formato PAPER ESTUDIANTE 5 Yudi-Santafe.Documento5 páginasAnexo 1 Formato PAPER ESTUDIANTE 5 Yudi-Santafe.yudi lorena santafe peñaAún no hay calificaciones
- Simbolos ElectricosDocumento23 páginasSimbolos ElectricosjarckledAún no hay calificaciones
- Cuaderno de Informes Semana 05 Iii SemestreDocumento10 páginasCuaderno de Informes Semana 05 Iii SemestrealbertoAún no hay calificaciones
- 06 - Instalaciones de Transmisión de ConexiónDocumento99 páginas06 - Instalaciones de Transmisión de ConexiónEduardoAún no hay calificaciones
- Motores de Inducción MonofásicosDocumento6 páginasMotores de Inducción MonofásicosMadelaine Caro CocaAún no hay calificaciones
- Correccion Lab 14Documento3 páginasCorreccion Lab 14Roderick LopezAún no hay calificaciones
- Analisis Vectorial de Transf.Documento19 páginasAnalisis Vectorial de Transf.Cristhian AFAún no hay calificaciones
- Normalización Topologia Zona Guayaquil v2Documento8 páginasNormalización Topologia Zona Guayaquil v2paul gutierrezAún no hay calificaciones
- Actividad N°4 Gianpiero ZecchettiDocumento20 páginasActividad N°4 Gianpiero ZecchettiGianpieroZecchettiAún no hay calificaciones
- 8 - Potencia, Energia y EficienciaDocumento15 páginas8 - Potencia, Energia y EficienciaKarely GarcíaAún no hay calificaciones
- Práctica 2 Sistemas de PotenciaDocumento10 páginasPráctica 2 Sistemas de Potenciaedgard_gonzález_3Aún no hay calificaciones
- Aplicación en Matlab para La Programación Del Despacho EconómicoDocumento12 páginasAplicación en Matlab para La Programación Del Despacho Económicoluisalbert7777Aún no hay calificaciones
- Informe Circuito RLDocumento7 páginasInforme Circuito RLHans HuamanAún no hay calificaciones
- Investigación SCR E.I.Documento35 páginasInvestigación SCR E.I.José SantanaAún no hay calificaciones
- DOC-CBC-ETG-Especificaciones Ténicas Eléctricas GeneralesDocumento48 páginasDOC-CBC-ETG-Especificaciones Ténicas Eléctricas GeneralesJosé Ignacio J. Sarria MartínezAún no hay calificaciones