También podría gustarte
- Guia Del Trotamundos - El HierroDocumento20 páginasGuia Del Trotamundos - El HierroBernardo LizardiAún no hay calificaciones
- Allanamiento Demanda 2Documento2 páginasAllanamiento Demanda 2Efrain CardenasAún no hay calificaciones
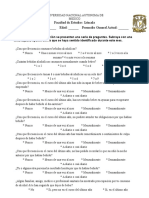
- Test de Alcoholismo & Atoestima Fes Iztacala. PPTX Con InstruccionesDocumento2 páginasTest de Alcoholismo & Atoestima Fes Iztacala. PPTX Con InstruccionesBetty GarciaAún no hay calificaciones
- Proyecto SocialDocumento11 páginasProyecto SocialEdson Depaz ReyesAún no hay calificaciones
- Normativa para El Manejo de Ropa en El LavaderoDocumento3 páginasNormativa para El Manejo de Ropa en El LavaderoBety SconzaAún no hay calificaciones
- Reforma Ord de DeporteDocumento29 páginasReforma Ord de DeporteNaymar LastraAún no hay calificaciones
- Reparacion Freno EstacionamientoDocumento13 páginasReparacion Freno EstacionamientoARANAún no hay calificaciones
- El HesicasmoDocumento4 páginasEl HesicasmoPbro Esteban DíazAún no hay calificaciones
- Fase 3 - Colaborativo - Grupo 170.Documento12 páginasFase 3 - Colaborativo - Grupo 170.Darwin BurbanoAún no hay calificaciones
- Personalidad Rigida y TAGDocumento427 páginasPersonalidad Rigida y TAGnymhushAún no hay calificaciones
- BPM (Sesión 4 - Patrones de Procesos de Negocios)Documento19 páginasBPM (Sesión 4 - Patrones de Procesos de Negocios)gaston6711Aún no hay calificaciones
- Preguntas para El Análisis de Video Audiencia SimuladaDocumento4 páginasPreguntas para El Análisis de Video Audiencia SimuladaJorge Smith Paz SocolaAún no hay calificaciones
- Desarrollo Humano en Estudios de PosgradoDocumento10 páginasDesarrollo Humano en Estudios de PosgradoTemistoclesAún no hay calificaciones
- Ecosistemas Acuaticos. OCEANOGRAFIA. Aspectos GeneralesDocumento38 páginasEcosistemas Acuaticos. OCEANOGRAFIA. Aspectos GeneralesAldair FukcencioAún no hay calificaciones
- Evaluación Lectura Un Viejo Que Leía Novelas de AmorDocumento4 páginasEvaluación Lectura Un Viejo Que Leía Novelas de AmorYovi Iturriaga ParraAún no hay calificaciones
- Hoja de Vida DEIBER TUNJANO AUXILIAR ADMINISTRATIVO PDFDocumento4 páginasHoja de Vida DEIBER TUNJANO AUXILIAR ADMINISTRATIVO PDFjose ovalleAún no hay calificaciones
- SociologíaDocumento8 páginasSociologíasayri rojasAún no hay calificaciones
- 1.-Industrias Mecanicas Continental PDFDocumento27 páginas1.-Industrias Mecanicas Continental PDFJavier Hector Caya100% (1)
- Química Orgánica 1104Documento5 páginasQuímica Orgánica 1104Juan Esteban Hurtado HernándezAún no hay calificaciones
- Orientacion e Insercion LaboralDocumento30 páginasOrientacion e Insercion LaboralJencarlosdj Yin Hurtado BerrospiAún no hay calificaciones
- TESTIMONAL Y Pliego de Posiciones para La Prueba Testimonial Del Juicio de Reconocimiento de PaternidadDocumento3 páginasTESTIMONAL Y Pliego de Posiciones para La Prueba Testimonial Del Juicio de Reconocimiento de PaternidadomarvvelardeAún no hay calificaciones
- Balance Social Versión FinalDocumento50 páginasBalance Social Versión FinalcredicoopAún no hay calificaciones
- LadrilloDocumento9 páginasLadrillocristina herreraAún no hay calificaciones
- Modelo de Ficha y Presupuesto Obras 2023Documento10 páginasModelo de Ficha y Presupuesto Obras 2023Dhenys RamosAún no hay calificaciones
- Taller Probabilidad 2 CorteDocumento25 páginasTaller Probabilidad 2 CorteLuis Gerardo Tequia TequiaAún no hay calificaciones
- Aloe Vera HemorroidesDocumento8 páginasAloe Vera HemorroidesElmaAún no hay calificaciones
- Tarea #3 de Psicologia Social y ComunitariaDocumento7 páginasTarea #3 de Psicologia Social y ComunitariaYissel RosaAún no hay calificaciones
- Presupuesto de EfectivoDocumento9 páginasPresupuesto de EfectivoDulce OjedaAún no hay calificaciones
- Andy 16 de NoviembreDocumento194 páginasAndy 16 de NoviembreĈamilo PİñeręṣAún no hay calificaciones
- Ex 20210908Documento8 páginasEx 20210908ggamflAún no hay calificaciones
- Tus Zonas Erroneas: Guía Para Combatir las Causas de la InfelicidadDe EverandTus Zonas Erroneas: Guía Para Combatir las Causas de la InfelicidadCalificación: 4.5 de 5 estrellas4.5/5 (1833)
- Los Secretos De La Mente Millonaria: Domina el juego de la riquezaDe EverandLos Secretos De La Mente Millonaria: Domina el juego de la riquezaCalificación: 5 de 5 estrellas5/5 (457)
- Fuerza de voluntad: Cómo practicar y dominar el autocontrolDe EverandFuerza de voluntad: Cómo practicar y dominar el autocontrolCalificación: 4.5 de 5 estrellas4.5/5 (91)
- El juego de la vida y cómo jugarloDe EverandEl juego de la vida y cómo jugarloCalificación: 5 de 5 estrellas5/5 (4)
- Más vida con hábitos saludablesDe EverandMás vida con hábitos saludablesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- El Monje Que Vendio Su Ferrari: Una Fábula EspiritualDe EverandEl Monje Que Vendio Su Ferrari: Una Fábula EspiritualCalificación: 4.5 de 5 estrellas4.5/5 (1699)
- Mujeres de luz: Guía para descubrir el poder de tu alma y su propósitoDe EverandMujeres de luz: Guía para descubrir el poder de tu alma y su propósitoCalificación: 4.5 de 5 estrellas4.5/5 (39)
- Resetea tu mente. Descubre de lo que eres capazDe EverandResetea tu mente. Descubre de lo que eres capazCalificación: 5 de 5 estrellas5/5 (196)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- ¡Tómate un respiro! Mindfulness: El arte de mantener la calma en medio de la tempestadDe Everand¡Tómate un respiro! Mindfulness: El arte de mantener la calma en medio de la tempestadCalificación: 5 de 5 estrellas5/5 (199)
- Sistema nervioso y osteopatía: Nervios periféricos, meninges craneales y espinales, y sistema nervioso vegetativo (Color)De EverandSistema nervioso y osteopatía: Nervios periféricos, meninges craneales y espinales, y sistema nervioso vegetativo (Color)Calificación: 5 de 5 estrellas5/5 (9)