También podría gustarte
- Mapa Vectorial - VigoDocumento1 páginaMapa Vectorial - VigouleciaAún no hay calificaciones
- Mapa Vectorial - TorremolinosDocumento1 páginaMapa Vectorial - TorremolinosuleciaAún no hay calificaciones
- Mapa Vectorial - SantanderDocumento1 páginaMapa Vectorial - SantanderuleciaAún no hay calificaciones
- Mapa Vectorial - OurenseDocumento1 páginaMapa Vectorial - OurenseuleciaAún no hay calificaciones
- Mapa Vectorial - CastellonDocumento1 páginaMapa Vectorial - CastellonuleciaAún no hay calificaciones
- Mapa Vectorial - MalagaDocumento1 páginaMapa Vectorial - MalagauleciaAún no hay calificaciones
- Mapa Vectorial - CastellonDocumento1 páginaMapa Vectorial - CastellonuleciaAún no hay calificaciones
- Mapa Vectorial - AvilesDocumento1 páginaMapa Vectorial - AvilesuleciaAún no hay calificaciones
- Mapa de Barcelona PDFDocumento187 páginasMapa de Barcelona PDFuleciaAún no hay calificaciones
- Callejero Gijon PDFDocumento1 páginaCallejero Gijon PDFuleciaAún no hay calificaciones
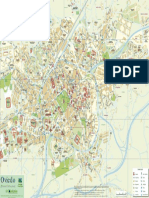
- Mapa Callejero OviedoDocumento1 páginaMapa Callejero OviedouleciaAún no hay calificaciones
- Las Minas de Cobre de Soto (Cantabria)Documento3 páginasLas Minas de Cobre de Soto (Cantabria)uleciaAún no hay calificaciones
- Cultivo Del Tomate Bajo InvernaderoDocumento24 páginasCultivo Del Tomate Bajo InvernaderouleciaAún no hay calificaciones
- Manual - HP49GDocumento891 páginasManual - HP49Gsal sal100% (2)
- Ejercicios en PHPDocumento2 páginasEjercicios en PHPGerardo GuevaraAún no hay calificaciones
- A2 Tema-2 ED-23Documento37 páginasA2 Tema-2 ED-23David CarrascalAún no hay calificaciones
- Osciladores de Onda Senoidal-1Documento20 páginasOsciladores de Onda Senoidal-1Haideliz GarcíaAún no hay calificaciones
- Viabilidad de Un Radio EnlaceDocumento6 páginasViabilidad de Un Radio EnlaceJuan Carlos Villanueva HenaoAún no hay calificaciones
- Categorías de Dispositivos MóvilesDocumento4 páginasCategorías de Dispositivos MóvilesCarlos AponteAún no hay calificaciones
- Deflectometro LWD3031Documento2 páginasDeflectometro LWD3031lsialer1517Aún no hay calificaciones
- Tema1 - El TeléfonoDocumento54 páginasTema1 - El TeléfonoKike DavilaAún no hay calificaciones
- Soldadura de PernosDocumento81 páginasSoldadura de Pernosdavih007Aún no hay calificaciones
- Cilindros Magnéticos y ElectrovalvulasDocumento4 páginasCilindros Magnéticos y Electrovalvulasjakdrive100% (1)
- Marketing Mix en IpadDocumento8 páginasMarketing Mix en IpadRodolfo Alberto Sepúlveda QuezadaAún no hay calificaciones
- INV E-749-07 Ensayode Tensión Indirecta para Determinar El Modulo Resiliente de Mezclas AsfálticasDocumento8 páginasINV E-749-07 Ensayode Tensión Indirecta para Determinar El Modulo Resiliente de Mezclas AsfálticasBlosky Valcárcel VargasAún no hay calificaciones
- Actual Manual de Chofer Repartidor Enero 2012Documento6 páginasActual Manual de Chofer Repartidor Enero 2012Leyla Contreras ChaucaAún no hay calificaciones
- Coeficientes de FiltradoDocumento4 páginasCoeficientes de Filtradovelkus2013Aún no hay calificaciones
- Bandas de Energia Tipo P y N.Documento11 páginasBandas de Energia Tipo P y N.lexarreygueAún no hay calificaciones
- Comparación de ModelosDocumento16 páginasComparación de Modelosvelkus2013Aún no hay calificaciones
- Instrumentacion Electronica - Miguel PerezDocumento12 páginasInstrumentacion Electronica - Miguel PerezDaniloAún no hay calificaciones
- T13 Maquinas de Corriente Continua PDFDocumento11 páginasT13 Maquinas de Corriente Continua PDFOshun Graciela luna choqueAún no hay calificaciones
- Access Point TareaDocumento2 páginasAccess Point TareaPaula BritoAún no hay calificaciones
- Todos Los Carros VolkswagenDocumento17 páginasTodos Los Carros VolkswagencristianAún no hay calificaciones
- Energizador - Motor - Julio 2022iDocumento6 páginasEnergizador - Motor - Julio 2022iManuel MorilloAún no hay calificaciones
- Programación Estructurada Sobre Un PLCDocumento6 páginasProgramación Estructurada Sobre Un PLCJuan Luis MerloAún no hay calificaciones
- Manual de Celda de Flotación EDEMETDocumento36 páginasManual de Celda de Flotación EDEMETAnonymous szhkKLAún no hay calificaciones
- Curso: Técnicas de Expresión Oral Y Escritas Proyecto Integrador Control de Desechos ElectronicosDocumento14 páginasCurso: Técnicas de Expresión Oral Y Escritas Proyecto Integrador Control de Desechos ElectronicosJosue Miguel Flores AlvarezAún no hay calificaciones
- Conexion DeltaDocumento27 páginasConexion DeltaSaul FloresAún no hay calificaciones
- Practica Quimica InorganicaDocumento3 páginasPractica Quimica InorganicaJose Reinaldo Olivera ChuraAún no hay calificaciones
- Historia de La Computadora - ArchivoDocumento16 páginasHistoria de La Computadora - ArchivoRusbelHuamanMAún no hay calificaciones
- 1una Vez Que Giramos La Llave de Contacto A Posición de Contacto El Circuito Primario Es Alimentado Por La Tensión de BateríaDocumento3 páginas1una Vez Que Giramos La Llave de Contacto A Posición de Contacto El Circuito Primario Es Alimentado Por La Tensión de BateríaRoger Choque FelixAún no hay calificaciones
- 81420m PDFDocumento37 páginas81420m PDFrodiju500% (1)
- Practicas - Antenas y PropagacionDocumento27 páginasPracticas - Antenas y Propagacionbpelayo789% (9)
- Nouri Pagina91Documento3 páginasNouri Pagina91Nelson Paz MoreAún no hay calificaciones