Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Control Automatico Unidad I PDF
Cargado por
AngelloTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Control Automatico Unidad I PDF
Cargado por
AngelloCopyright:
Formatos disponibles
UNIDAD I 1
UNIDAD I
INTRODUCCION A LOS SISTEMAS DE CONTROL
1.1 INTRODUCCION
El control automtico es esencial en el control numrico de las mquinas herramientas de las
industrias de manufactura, en el diseo de sistemas de pilotos automticos en la industria aeroespacial, y
en el diseo de automviles y camiones en la industria automotriz. Tambin es esencial en las
operaciones industriales como el control de presin, temperatura, humedad, viscosidad y flujo en las
industrias de proceso.
El control automtico consta de un proceso en el que se trata de ajustar un parmetro a una
referencia. Este dispositivo automtico capaz de gobernar el funcionamiento de una mquina o un
proceso se denomina controlador o regulador.
El control automtico ha sido fundamental para el desarrollo de la ingeniera y es de extrema
importancia en los siguientes temas:
Tecnologa espacial
Sistemas robticos
Sistemas blicos Control de temperatura
Procesos industriales Control de presin
Diseo automotriz Control de flujo
Sistemas econmicos Control de nivel
En la prctica el control automtico aporta medios para optimizar los sistemas dinmicos,
mejorar la productividad y encargarse de operaciones repetitivas y rutinarias.
PANORAMA HISTORICO
JAMES WATT: regulador de velocidad centrfuga, para el control de velocidad de una
mquina de vapor, en el siglo XVIII.
1922, MINORSKY trabaj en los controladores para dirigir embarcaciones.
1932, NYQUIST diseo un procedimiento relativamente simple para determinar la
estabilidad de los sistemas en lazo cerrado.
1934, HAZEN quin introdujo el trmino servomecanismo para los sistemas de control de
posicin.
DECADA DE LOS 40, mtodo de la respuesta en frecuencia.
A FINES DE LOS 40 Y COMIENZO DE LOS 50, se desarrolla por completo el mtodo
del lugar de las races.
DESDE 1960, con la disponibilidad de las computadoras digitales se hizo posible el
anlisis en el dominio del tiempo de sistemas complejos.
ENTRE 1960 y 1980, se investigaron a fondo los sistemas tanto determinsticos como
estocsticos.
Las aplicaciones recientes de la teora de control moderna incluyen sistemas ajenos a la
Ingeniera, como los Biolgicos, Econmicos y Socioeconmicos.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 2
DEFINICIONES: antes de analizar los sistemas de control, deben definirse ciertos trminos
bsicos.
VARIABLE CONTROLADA Y VARIABLE MANIPULADA: la variable controlada es la
cantidad o condicin que se mide y controla (salida). La variable manipulada es la
cantidad o condicin que el controlador modifica para afectar el valor de la variable
controlada.
PLANTAS: cualquier objeto fsico que se va a controlar (tal como un dispositivo
mecnico, un horno de calefaccin, un reactor qumico o una nave espacial).
PROCESOS: cualquier operacin que se va a controlar, como los procesos qumicos,
econmicos y biolgicos.
SISTEMAS: combinacin de componentes que actan juntos y realizan un objetivo
determinado. Un sistema no necesariamente es fsico.
PERTURBACIONES: una perturbacin es una seal que tiende a afectar negativamente
el valor de la salida de un sistema. Si la perturbacin se genera dentro del sistema se
denomina interna, en tanto que una perturbacin externa se produce fuera del sistema y
es una entrada.
CONTROL REALIMENTADO: se refiere a una operacin que en presencia de
perturbaciones, tiende a reducir la diferencia entre la salida de un sistema y alguna
entrada de referencia y lo contina haciendo con base en esta diferencia.
1.2 EJEMPLO DE UN SISTEMA DE CONTROL:
CONVERTIDOR INTERFASE
A/D
HORNO
ELECTRICO
ENTRADA
RELEVADOR AMPLIFICADOR PROGRAMADA
INTERFASE
FIGURA N 1.1 SISTEMA DE CONTROL DE TEMPERATURA
SISTEMA DE CONTROL DE TEMPERATURA
La figura muestra un diagrama esquemtico del control de temperatura de un horno elctrico.
La temperatura del horno se mide mediante un termmetro, que es un dispositivo analgico. Esta se
convierte en una temperatura digital mediante un convertidor A/D. La temperatura digital se introduce a
un controlador mediante una interface. Esta temperatura digital se compara con una temperatura que se
ingresa mediante un programa y si hay una discrepancia (error), el controlador enva una seal al
calefactor, a travs de una interface, un amplificador y un relevador, para hacer que la temperatura del
horno adquiera el valor deseado.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 3
1.3 CONTROL EN LAZO CERRADO EN COMPARACIN CON EL CONTROL EN LAZO
ABIERTO.
SISTEMAS DE CONTROL REALIMENTADOS.
Un sistema que mantiene la relacin prescrita entre la salida y la entrada de referencia,
comparndolas y usando la diferencia como medio de control, se denomina sistema de control
realimentado.
SISTEMAS DE CONTROL EN LAZO CERRADO
Los sistemas de control realimentados se denominan tambin sistemas de control en lazo
cerrado. El termino control en lazo cerrado siempre implica el uso de una accin de control realimentado
para reducir el error del sistema.
SISTEMAS DE CONTROL EN LAZO ABIERTO
Los sistemas en los cuales la salida no afecta la accin de control se denominan sistemas de
control en lazo abierto en otras palabras en un sistema de control en lazo abierto no se mide la salida ni
se realimenta para comparar con la entrada.
VENTAJAS DE LOS SISTEMAS DE CONTROL EN LAZO ABIERTO
1. Una construccin sencilla y un mantenimiento fcil.
2. Son menos costosos que un sistema equivalente en lazo cerrado.
3. No existe el problema de estabilidad.
4. Son convenientes cuando es difcil medir la salida o no son factibles en el aspecto
econmico.
DESVENTAJAS DE LOS SISTEMAS DE CONTROL EN LAZO ABIERTO
1. Las perturbaciones y los cambios en la calibracin provocan errores y la salida puede ser
diferente de lo que se busca.
2. Para conservar la calidad requerida en la salida, es necesaria una recalibracin de vez en
cuando.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 4
1.4 REPASO NUMEROS COMPLEJOS
X +1 = 0, no tiene solucin en
2
X2 = 1 /
X= ( 1)
X = i, unidad imaginaria [j en ingeniera]
1.4.1 POTENCIAS
j= ( 1)
2 En general tenemos:
j = -1
3
j = -j j 4 k + n = j n
j4 = 1
1.4.2 DESCRIPCIN GRAFICA
Z = a+jb
Z = Magnitud fase
(a )
Z(a,b)
b
Z = 2
+ b2
( )
= tg 1 b a
Z = Z cos + j Z sen
a
1.4.3 PROPIEDADES
Z = a jb , conjugado Ejemplo: sea Z1 = 3+4j y Z2=2 - j
Z 1
=Z Z 1 = 3 - 4j
Z Z1 Z2 = 5+3j
Si Z1 = a+jb, y Z2 = c+jd Z1 Z2 = 10 + 5j
Z1
Z1 Z2 = (a c)+j(b d) = Z1 Z 21 = Z1 Z 2 = 0.4+2.2j
Z2 Z2
Z1 Z2 = (ac - bd)+j(ad + bc) Z1 = 5
= 53.1
Z1
= Z1 Z 21 grfico plano z
Z2
1.5 INTRODUCCIN A LA TRANSFORMADA DE LAPLACE
1.5.1 VARIABLE COMPLEJA
s= + j
Variable Compleja Parte real Parte Imaginaria
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 5
1.5.2 FUNCIN COMPLEJA
F ( s) = (F
2
X + FY2 )
= tg 1 FY F
F(s) = FX + j FY
X
Las funciones complejas generalmente se encuentran en el anlisis de sistemas de control
lineales. [Una funcin compleja G(s) es analtica en el plano s, si G(s) y todas sus derivadas existen en
tal regin]
1.5.3 TEOREMA DE EULER
Expansin de series de potencia de cos y sen :
2 4 6
cos = 1 + +K
2! 4! 6!
3 5 7
sen = + +K
3! 5! 7!
2 3 4 5
Entonces cos +j sen = 1 + j j +K + + j
2! 4! 5! 3!
= 1 + j +
( j )2 + ( j )3 + ( j )4 + K
2! 3! 4!
Por otro lado:
e =
X
1+ X +
( X )2 + ( X )3 + ( X )4 + K
2! 3! 4!
TEOREMA DE EULER:
e = cos +j sen
j
e-j = cos - j sen , complejo conjugado de ej
Se deduce del teorema de Euler:
cos =
1 J
2
(
e + e J )
sen =
1 J
(
e e J )
2j
1.5.4 LA TRANSFORMADA DE LAPLACE
f(t) = funcin en dominio del tiempo t tal que f(t) =0 t<0
s = Variable compleja
= Operador lineal que indica que la cantidad que la antecede se va a transformar
mediante la integral de laplace
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 6
F(s) = Transformada de laplace de f(t)
DEFINICION DE LA TRANSFORMADA DE LAPLACE
st
[ f(t) ] = F(s) = f (t ) e
0
dt
DEFINICION DE LA TRANSFORMADA INVERSA DE LAPLACE
1
F ( s) e st dt
-1
[ F(s) ] = f(t) =
2j
PROPIEDADES
[ A f(t) ] = A [ f(t) ]
[ f1(t) + f2(t)] = [f1(t)]+ [f2(t)]
TEOREMA DE DIFERENCIACIN
d
[ f(t)] = s F(s) f(0), donde f(0) es el valor inicial de f(t) evaluado en t = 0
dt
d2 2
[ f(t)] = s F(s) s f(0) f (0)
dt 2
Generalizando:
dn
[ n
f(t)] = sn F(s) sn-1 f(0) sn-2 f(0) K s f(n-2) (0) f(n-1) (0)
dt
1.5.4.1 FUNCION ESCALN
0 t < 0
f(t)
A t > 0, A = Cte., no est definida en t = 0
1
st A
[ f(t) ] = A e
0
dt =
s t
1
A = 1, funcin escaln unitario [ (t) ] =
s
1.5.4.2 FUNCION RAMPA
0 t < 0
r(t)
At t 0 m=A
st A
[ r(t) ] = At e
0
dt =
s2 t
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 7
1.5.4.3 FUNCION SENO y COSENO
A As
[ A sen (wt)] = , [ A cos (wt)] =
s +2
2
s +22
1.5.4.4 FUNCION PULSO
A 0 < t < t0 A
f(t) t0
0 t < 0, t > t0
[ f(t) ] =
A
t0 s
(1 e st0 ) t0 t
1.5.4.5 FUNCION IMPULSO UNITARIO
1 0t< t
(t )
t
f(t)
t t + t
0 t 0
La altura del impulso (magnitud) es A/ t, donde t es la duracin del impulso
El rea del impulso es 1. Si t 0 => la altura A / t , pero el rea sigue siendo 1
[ (t) ] = 1
1.5.4.6 FUNCION DESPLAZAMIENTO
[ f (t ) ] = e s F (s )
[ e t f (t ) ] = e t f (t )e st dt = F ( s + )
0
EJEMPLO:
[ e t sen(t ) ] =
(s + )2 + 2
1.5.5 LA TRANSFORMADA INVERSA DE LAPLACE
No se recomienda el uso de la integral de inversin para determinar transformadas inversas de
Laplace de funciones que generalmente se encuentran en ingeniera de control.
Se recomienda el uso de tablas expandir la funcin F(s) en fracciones parciales y escribir en
trminos de funciones simples de s para las cuales ya se conocen las trasformadas inversas de laplace.
Num( s ) B( s )
Se tiene F(s) = =
Den( s ) A( s )
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 8
Donde Num (s) y Den (s) son polinomios en funcin de la variable s. La potencia ms alta de s
Den(s) debe ser mayor que la potencia ms alta de s en Num(s), de lo contrario se debe dividir para
producir un polinomio de s ms un residuo.
Num( s ) k ( s + z1 )( s + z 2 ) K ( s + z m )
F(s) = = , m<n
Den( s ) ( s + p1 )( s + p 2 ) K ( s + p n )
C1 C2 Cn
F(s)= + +K+ ,
s + p1 s + p 2 s + pn
B (s )
Donde C k = (s + p k )
A (s )
s = pk
Ck
-1
[ ] = C k e pk t
s + pk
EJEMPLO
s+3
1. F(s) = , determinar f(t)
(s + 1)(s + 2)
La expansin en fracciones parciales de F(s) es:
s+3 C1 C2
F ( s) = = +
(s + 1)(s + 2) (s + 1) (s + 2)
s+3 s + 3
C1 = (s + 1) = =2
(s + 1) (s + 2) s = 1
s + 2
s = 1
s+3 s + 3
C 2 = (s + 2) = = 1
(s + 1) (s + 2) s = 2
s +1
s = 2
-1
Luego: f (t) = [F(s)] =
-1 2 -1 1
= (s +1) - (s + 2 )
Finalmente: = 2 e t e 2t
Nota: races complejas conjugadas no se recomienda expandir en fracciones parciales. Se
recomienda expandirla en la suma de una funcin seno y coseno amortiguada.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 9
Tabla N 1.1: Pares de Transformadas de Laplace
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 10
Tabla N 1.2: Propiedades de la Transformada de Laplace
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
También podría gustarte
- Tabla de Fracciones Pulgada, Decimales de Pulgada, MilímetrosDocumento1 páginaTabla de Fracciones Pulgada, Decimales de Pulgada, MilímetrosAngelloAún no hay calificaciones
- Despiece MP1000Documento200 páginasDespiece MP1000Angello100% (3)
- Sikagard - 720 EpocemDocumento5 páginasSikagard - 720 EpocemAngelloAún no hay calificaciones
- EnerpacDocumento232 páginasEnerpacMarco Abarca100% (1)
- Lab. N°4 Diagrama de Bode (Magnitud y Fase)Documento25 páginasLab. N°4 Diagrama de Bode (Magnitud y Fase)AngelloAún no hay calificaciones
- Manual PowerStar W7 - ESDocumento7 páginasManual PowerStar W7 - ESAngello67% (6)
- Fundamento de La Motricidad en El Rendimientos Deportivo. Fernandez RomeroDocumento573 páginasFundamento de La Motricidad en El Rendimientos Deportivo. Fernandez RomeroJordi Cañadas LopezAún no hay calificaciones
- Luna de XelajúDocumento3 páginasLuna de XelajúGerson IcoAún no hay calificaciones
- Examenes Soma 2021Documento9 páginasExamenes Soma 2021Edinson Cotrina PiaAún no hay calificaciones
- Aristóteles Padre de La Lógica OkDocumento25 páginasAristóteles Padre de La Lógica OksoledadAún no hay calificaciones
- Canciones Del 20 Mayo 2018Documento6 páginasCanciones Del 20 Mayo 2018Samuel Noriega LeccaAún no hay calificaciones
- Triptico Gelatina AloeDocumento2 páginasTriptico Gelatina AloeJorge Rojas33% (3)
- Valoracion Dietetica 2.1Documento12 páginasValoracion Dietetica 2.1Aidee AguilarAún no hay calificaciones
- Identificacion de Los Factores Que AfectanDocumento18 páginasIdentificacion de Los Factores Que AfectanenersolicAún no hay calificaciones
- Distribucion de PlantasDocumento15 páginasDistribucion de PlantasHENRY LOPEZAún no hay calificaciones
- Hoja RecomendacionesDocumento11 páginasHoja Recomendacionesmargarita morales gonzalesAún no hay calificaciones
- CNC LASer 2.0Documento43 páginasCNC LASer 2.0Nando Martinez Sandoval100% (1)
- Simulacro Residentado Medico Parte B Con ClavesDocumento8 páginasSimulacro Residentado Medico Parte B Con ClavesKellyMarTegraAún no hay calificaciones
- Actividad Mecanica Indusrial 2234653Documento7 páginasActividad Mecanica Indusrial 2234653Luis FraileAún no hay calificaciones
- Sumas de Riemann Y TFCDocumento6 páginasSumas de Riemann Y TFCDiego VasquezAún no hay calificaciones
- Museo Mitre - Documentos de Su Archivo Colonial 1514-1810 - 1906Documento314 páginasMuseo Mitre - Documentos de Su Archivo Colonial 1514-1810 - 1906BibliotecarioAún no hay calificaciones
- C 189 Innovateperu Adtc2 2020.docx Distribuidora TulipanDocumento8 páginasC 189 Innovateperu Adtc2 2020.docx Distribuidora TulipanWizeri Zegarra GálvezAún no hay calificaciones
- Fase 1 Gomez Yuli Andrea FinalDocumento63 páginasFase 1 Gomez Yuli Andrea FinalFREDIS AGUASAún no hay calificaciones
- El Termistor NTCDocumento16 páginasEl Termistor NTCHugo CarhuallanquiAún no hay calificaciones
- MASA23 - U1 - IT1 (Trabajo Taller 1)Documento4 páginasMASA23 - U1 - IT1 (Trabajo Taller 1)juago9Aún no hay calificaciones
- Analisis Bromatologico Del AguacateDocumento16 páginasAnalisis Bromatologico Del AguacateDIANA VERAAún no hay calificaciones
- Stellaria MediaDocumento5 páginasStellaria MediaOzzyel CrowleyAún no hay calificaciones
- Palabras en ItalianoDocumento52 páginasPalabras en ItalianoDaniel Bolivar100% (1)
- Biologia Unam 2022Documento35 páginasBiologia Unam 2022Rodrigo Karim DiazAún no hay calificaciones
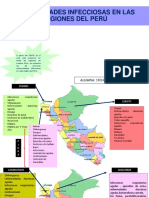
- Enfermedades Infecciosas en El PerúDocumento9 páginasEnfermedades Infecciosas en El PerúStefannie Elizabeth Quispe LorenzoAún no hay calificaciones
- Ebook PDFDocumento234 páginasEbook PDFJoao SalazarAún no hay calificaciones
- Apunte de Conceptos Basicos Parte 1Documento58 páginasApunte de Conceptos Basicos Parte 1isidroAún no hay calificaciones
- Infección Por El Virus Del Dengue - Patogénesis - UpToDateDocumento28 páginasInfección Por El Virus Del Dengue - Patogénesis - UpToDateSusana PastoraAún no hay calificaciones
- CalorimetriaDocumento42 páginasCalorimetriaMALCA HIDALGO MARYCIELO ELIZABETHAún no hay calificaciones
- Significado de A1, ..... AaashtoDocumento4 páginasSignificado de A1, ..... AaashtoFernandezMendozaBrayanValentin 5to AAún no hay calificaciones
- Piscina NiveladaDocumento30 páginasPiscina NiveladaYhesy Anavi LAún no hay calificaciones