También podría gustarte
- Historia Del Muelle y Su Uso ActualDocumento2 páginasHistoria Del Muelle y Su Uso Actualcast577Aún no hay calificaciones
- PROBLEMAS Cap. I - II 2020BDocumento16 páginasPROBLEMAS Cap. I - II 2020BAlexander TRAún no hay calificaciones
- Ordenanza Que Regula El Uso Temporal Del Retiro Municipal Co Ordenanza No 526 2017 MDR 1605927 1Documento2 páginasOrdenanza Que Regula El Uso Temporal Del Retiro Municipal Co Ordenanza No 526 2017 MDR 1605927 1Alexander EspinozaAún no hay calificaciones
- 1 Sau 1 100130123006873 030 Inf PericialDocumento2 páginas1 Sau 1 100130123006873 030 Inf PericialAlexander EspinozaAún no hay calificaciones
- Anexo Ii: Formulario Único de Edificación - FueDocumento12 páginasAnexo Ii: Formulario Único de Edificación - Fuerobert_salas_14100% (1)
- 06 GH 010 Alcances y ContenidosDocumento3 páginas06 GH 010 Alcances y ContenidospabloAún no hay calificaciones
- Declaracion Jurada Del Propietario - Amaro LeonDocumento1 páginaDeclaracion Jurada Del Propietario - Amaro LeonAlexander EspinozaAún no hay calificaciones
- LEV. CUNA SUB 2 Layout1Documento1 páginaLEV. CUNA SUB 2 Layout1Alexander EspinozaAún no hay calificaciones
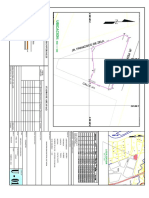
- Terreno para Donacion Tarica Cementerio A3 22Documento1 páginaTerreno para Donacion Tarica Cementerio A3 22Alexander EspinozaAún no hay calificaciones
- Comportamiento Humano y Su Influencia en La Seguridad Laboral 1Documento45 páginasComportamiento Humano y Su Influencia en La Seguridad Laboral 1Alexander EspinozaAún no hay calificaciones
- Procesos Geológicos Internos Externos YacimtsDocumento68 páginasProcesos Geológicos Internos Externos YacimtsAlexander EspinozaAún no hay calificaciones
- AdjuntoDocumento1 páginaAdjuntoAlexander EspinozaAún no hay calificaciones
- 1111Documento18 páginas1111Alexander EspinozaAún no hay calificaciones
- INFORME TECNICO Nº364 Exp. N°4737 CatacDocumento2 páginasINFORME TECNICO Nº364 Exp. N°4737 CatacAlexander EspinozaAún no hay calificaciones
- LEV. CUNA MATRIZ Layout1Documento1 páginaLEV. CUNA MATRIZ Layout1Alexander EspinozaAún no hay calificaciones
- Universidad Nacional de Ancash Santiago Antúnez de Mayolo 1Documento35 páginasUniversidad Nacional de Ancash Santiago Antúnez de Mayolo 1Alexander EspinozaAún no hay calificaciones
- PRACTICA AUTOCAD n2Documento3 páginasPRACTICA AUTOCAD n2Alexander EspinozaAún no hay calificaciones
- Titulo Del ProyectoDocumento2 páginasTitulo Del ProyectoAlexander EspinozaAún no hay calificaciones
- Medio AmbienteDocumento3 páginasMedio AmbienteAlexander EspinozaAún no hay calificaciones
- Tesis Principe UNASAM CorregidoDocumento71 páginasTesis Principe UNASAM CorregidoAlexander EspinozaAún no hay calificaciones
- CURRÍCULUM VITAE - Ingeniero Alexander Principe.Documento24 páginasCURRÍCULUM VITAE - Ingeniero Alexander Principe.Alexander EspinozaAún no hay calificaciones
- Niebla y NeblinaDocumento13 páginasNiebla y NeblinaAlexander EspinozaAún no hay calificaciones
- Tesis Principe UNASAM CorregidoDocumento71 páginasTesis Principe UNASAM CorregidoAlexander EspinozaAún no hay calificaciones
- Tesis Principe UNASAM CorregidoDocumento19 páginasTesis Principe UNASAM CorregidoAlexander EspinozaAún no hay calificaciones
- Comportamiento Humano y Su Influencia en La Seguridad Laboral 1Documento45 páginasComportamiento Humano y Su Influencia en La Seguridad Laboral 1Alexander EspinozaAún no hay calificaciones
- Informe Tecnico #05635Documento2 páginasInforme Tecnico #05635Alexander EspinozaAún no hay calificaciones
- Psicrometro TerminadoDocumento32 páginasPsicrometro TerminadoAlexander Espinoza50% (2)
- Principe Espinoza Gheyenr Alexander Krigeage 1Documento30 páginasPrincipe Espinoza Gheyenr Alexander Krigeage 1Alexander EspinozaAún no hay calificaciones
- Por Dañar Bienes de Propierdad PúblicaDocumento2 páginasPor Dañar Bienes de Propierdad PúblicaAlexander EspinozaAún no hay calificaciones
- Variograma Principe EspinozaDocumento4 páginasVariograma Principe EspinozaAlexander EspinozaAún no hay calificaciones
- Informe Tecnico #10589Documento2 páginasInforme Tecnico #10589Alexander EspinozaAún no hay calificaciones
- Dialnet MetodologiaDeProspeccionDeYacimientosTardoantiguos 3044007Documento12 páginasDialnet MetodologiaDeProspeccionDeYacimientosTardoantiguos 3044007Alexander EspinozaAún no hay calificaciones
- Unidad 6 El Agua en Los Sistemas BiológicosDocumento11 páginasUnidad 6 El Agua en Los Sistemas BiológicosArmando Aguilar0% (1)
- Análisis Modal Espectral en Estructuras Con Aisladores ElastoméricosDocumento25 páginasAnálisis Modal Espectral en Estructuras Con Aisladores ElastoméricosJenniffer SalazarAún no hay calificaciones
- Problemas de Fisica FniDocumento297 páginasProblemas de Fisica FniHerlan FloresAún no hay calificaciones
- Manual DanfosDocumento84 páginasManual DanfosKatherine G. EstradaAún no hay calificaciones
- Presentacion Sistema de UnidadesDocumento19 páginasPresentacion Sistema de UnidadesgreckoromAún no hay calificaciones
- Aportaciones de Mendeleiev A La Tabla PeriódicaDocumento3 páginasAportaciones de Mendeleiev A La Tabla PeriódicaUziel Gil25% (4)
- Caida LibreDocumento5 páginasCaida Libre42784653Aún no hay calificaciones
- Caracterizacion-C 7Documento26 páginasCaracterizacion-C 7Guido HuertaAún no hay calificaciones
- (75699457) Matemática Básica para AstronomíaDocumento10 páginas(75699457) Matemática Básica para AstronomíaMauricio SilvaAún no hay calificaciones
- Cuestionario de Neumática Unidad 1Documento3 páginasCuestionario de Neumática Unidad 1NinaLoveroAún no hay calificaciones
- Investigación PatronesDocumento4 páginasInvestigación PatronesCarlos Morales CarbajalAún no hay calificaciones
- Formulario DinamicaDocumento4 páginasFormulario DinamicaJorge QuinteroAún no hay calificaciones
- Informe 1 - Mediciones Electricas 1Documento5 páginasInforme 1 - Mediciones Electricas 1maxparionaAún no hay calificaciones
- Prac Capacidad CalorificaDocumento7 páginasPrac Capacidad CalorificaCarlos Erick De JesusAún no hay calificaciones
- Unidad2 PDFDocumento25 páginasUnidad2 PDFDesirée González CardosoAún no hay calificaciones
- Informe Fisica Leyes de Newton Semana 8Documento17 páginasInforme Fisica Leyes de Newton Semana 8Ciara XimenaAún no hay calificaciones
- Fã Sica CoinDocumento3 páginasFã Sica CoinLucia ToribioAún no hay calificaciones
- Caida LibreDocumento5 páginasCaida LibreMayerli claudia Rivero AlmanzaAún no hay calificaciones
- Pre Practica 3Documento3 páginasPre Practica 3Chacho OvalleAún no hay calificaciones
- Biografias CristallografiaDocumento2 páginasBiografias CristallografiaJOHANA LUCANO BARRIENTOSAún no hay calificaciones
- Ensayo de Medición de Relación de TransformaciónDocumento10 páginasEnsayo de Medición de Relación de Transformacióngg92Aún no hay calificaciones
- PROYECTODocumento14 páginasPROYECTOJhair Bolaños BenavidesAún no hay calificaciones
- Fisica Tarea 2 UtelDocumento6 páginasFisica Tarea 2 UtelAldair14Aún no hay calificaciones
- Cálculo de La Evapotranspiración PotencialDocumento27 páginasCálculo de La Evapotranspiración PotencialMarco Rafael DíazAún no hay calificaciones
- Mosterin (2000) Conceptos Comparativos CuantitativosDocumento21 páginasMosterin (2000) Conceptos Comparativos CuantitativosOtto GomezAún no hay calificaciones
- Espacios VectorialesDocumento15 páginasEspacios Vectorialesjosuneu7211Aún no hay calificaciones
- Clase 1 Equilibrio de Una ParticulaDocumento48 páginasClase 1 Equilibrio de Una ParticulaYulieth Palacio VanegasAún no hay calificaciones
- La Leyenda Formulario : Materia: Fisica Nombre: Fernanda Cacho Carbajal. Semestre:3Ro Grupo: A No - de Lista: 3Documento8 páginasLa Leyenda Formulario : Materia: Fisica Nombre: Fernanda Cacho Carbajal. Semestre:3Ro Grupo: A No - de Lista: 32 Fernanda Cacho carbajalAún no hay calificaciones