También podría gustarte
- Electrónica análoga: Diseño de circuitosDe EverandElectrónica análoga: Diseño de circuitosCalificación: 4.5 de 5 estrellas4.5/5 (15)
- La Máquina de InyecciónDocumento5 páginasLa Máquina de InyecciónCarlos Banda RodriguezAún no hay calificaciones
- S&B Programas - Matchcad 14.0 (Mega)Documento3 páginasS&B Programas - Matchcad 14.0 (Mega)Alvaro De La CruzAún no hay calificaciones
- Lab8 PLCDocumento18 páginasLab8 PLCDavid MontescoAún no hay calificaciones
- Diseño de Un Filtro Butterworth Utilizando El Método de La Transformada BilinealDocumento4 páginasDiseño de Un Filtro Butterworth Utilizando El Método de La Transformada BilinealAlex CruzAún no hay calificaciones
- Manual Acceso 2.3Documento218 páginasManual Acceso 2.3Tonatiuh Hernandez100% (1)
- Pid Con Retardo de TransporteDocumento36 páginasPid Con Retardo de TransporteRichardAún no hay calificaciones
- Laboratorio-06-FF - Comunicacion Con Handheld 375Documento14 páginasLaboratorio-06-FF - Comunicacion Con Handheld 375enrique5508Aún no hay calificaciones
- Normas de CalidadDocumento20 páginasNormas de CalidadWillians Jesus Gonzalez ColinaAún no hay calificaciones
- Otras Estructuras Industriales de PIDDocumento15 páginasOtras Estructuras Industriales de PIDGerardoAún no hay calificaciones
- 20181120-Guia para Tss - Proyectos TLF Ip Fusion - Hl5 v2Documento21 páginas20181120-Guia para Tss - Proyectos TLF Ip Fusion - Hl5 v2liliaAún no hay calificaciones
- Res 811 LDocumento45 páginasRes 811 LDaliaSanchezAún no hay calificaciones
- Implementacion de Un Alimentador ElectroneumaticoDocumento79 páginasImplementacion de Un Alimentador ElectroneumaticoAn HFAún no hay calificaciones
- PLC IntermedioDocumento70 páginasPLC IntermedioMandrake26Aún no hay calificaciones
- ControlLogix Laboratorio 01 BackupDocumento21 páginasControlLogix Laboratorio 01 Backupruben pichilingueAún no hay calificaciones
- C16 5-7 Grafcet 2018-IiDocumento62 páginasC16 5-7 Grafcet 2018-IiYsael Narciso YanavilcaAún no hay calificaciones
- Cursmo Mec ClasicaDocumento159 páginasCursmo Mec ClasicaCamilo PerezAún no hay calificaciones
- Acciones Correctivas, Acciones Preventivas y Tecnicas de Analisis de Causa RaizDocumento43 páginasAcciones Correctivas, Acciones Preventivas y Tecnicas de Analisis de Causa RaizHoruz79100% (1)
- Lab 07 - Conversión ADCDocumento10 páginasLab 07 - Conversión ADCDilman Alberto Ccotahuana HuarcaAún no hay calificaciones
- Informe de Protocolos de Comunicacion y Sus Componetes en PLCDocumento14 páginasInforme de Protocolos de Comunicacion y Sus Componetes en PLCWilson N GarciaAún no hay calificaciones
- Sistema de SecadoDocumento12 páginasSistema de Secadovicky gonzalezAún no hay calificaciones
- Curso de Instrumentos y Sistemas de Control - Clase 2Documento26 páginasCurso de Instrumentos y Sistemas de Control - Clase 2Richard FloresAún no hay calificaciones
- Lab6 Linealizacion y Punto de OperacionDocumento6 páginasLab6 Linealizacion y Punto de OperacionJohan Adrian Arcos SantacruzAún no hay calificaciones
- Problemas para La Clase de HoyDocumento94 páginasProblemas para La Clase de Hoyjuliomejia490Aún no hay calificaciones
- Manual 3com 4226t PuertosDocumento16 páginasManual 3com 4226t PuertosCesar AugustoAún no hay calificaciones
- Estadia Capitulo 2Documento33 páginasEstadia Capitulo 2walter deyaetAún no hay calificaciones
- Control Lógico Programable ProyectoDocumento24 páginasControl Lógico Programable ProyectorosaliaAún no hay calificaciones
- RCM Bomba de PistonesDocumento17 páginasRCM Bomba de PistonesJeyson Minaya PantojaAún no hay calificaciones
- Tipos Y Seleccion de Una UPSDocumento5 páginasTipos Y Seleccion de Una UPSraul1023Aún no hay calificaciones
- Diseño de Un Sistema de Control y Adquisición de Datos para Un Sistema Acuapónico ResidencialDocumento87 páginasDiseño de Un Sistema de Control y Adquisición de Datos para Un Sistema Acuapónico ResidencialXavier EduardoAún no hay calificaciones
- Puente Análisis Estático 1 2Documento31 páginasPuente Análisis Estático 1 2sebastian sierraAún no hay calificaciones
- Práctica 1 Compuertas LogicasDocumento14 páginasPráctica 1 Compuertas Logicasleandro sanchezAún no hay calificaciones
- CAPITULO V - Sistema de Control en El Area - MRDocumento73 páginasCAPITULO V - Sistema de Control en El Area - MRDiego VelardeAún no hay calificaciones
- Regulación de Velocidad de Una Central A VaporDocumento39 páginasRegulación de Velocidad de Una Central A VaporCamilo AraujoAún no hay calificaciones
- Descriptor Integracion de Redes Industriales (Vii)Documento4 páginasDescriptor Integracion de Redes Industriales (Vii)Rienzi Nicolás Guzmán AravenaAún no hay calificaciones
- 01 MotivacionDocumento65 páginas01 MotivacionJorge FajardoAún no hay calificaciones
- Panel de Control Con PLC para La Obtención de Carbonato de Calcio"Documento120 páginasPanel de Control Con PLC para La Obtención de Carbonato de Calcio"ENIC-AITCGAún no hay calificaciones
- Formas Canonicas Sesion3Documento59 páginasFormas Canonicas Sesion3Alfredo Amaro R.Aún no hay calificaciones
- Manual HMI (001-100) .En - EsDocumento100 páginasManual HMI (001-100) .En - EsAngel RamosAún no hay calificaciones
- Senales Análogas y DigitalesDocumento6 páginasSenales Análogas y DigitalesSalomme Alvarez CabreraAún no hay calificaciones
- Desgaste Por OxidaciónDocumento8 páginasDesgaste Por OxidaciónDiegobetoLuistoño Cuatro Nombres0% (1)
- Fir 315Documento14 páginasFir 315Giovanni NavarroAún no hay calificaciones
- Sistema Operativo Microcontroladores Pic RtosDocumento22 páginasSistema Operativo Microcontroladores Pic RtosJean Carlos Herrera PérezAún no hay calificaciones
- Caso Therac 25Documento6 páginasCaso Therac 25Saúl PlazaAún no hay calificaciones
- Arrancadores Dado Ing PDFDocumento41 páginasArrancadores Dado Ing PDFFabiaMartinez100% (2)
- Serie de FourierDocumento21 páginasSerie de FourierJuan Javier Jara BautistaAún no hay calificaciones
- Laboratorio 1 - Tercer CicloDocumento16 páginasLaboratorio 1 - Tercer CicloFabrizzio Orellana AstoAún no hay calificaciones
- VLSM y CIDR (Características, Implementación Y/o Configuración)Documento15 páginasVLSM y CIDR (Características, Implementación Y/o Configuración)Frank Reynaldo80% (5)
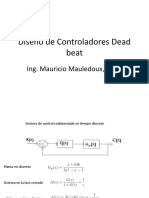
- TAC6 Diseño de Controladores Dead BeatDocumento16 páginasTAC6 Diseño de Controladores Dead BeatMiguelSAún no hay calificaciones
- Montando Servidor Turnkey LinuxDocumento153 páginasMontando Servidor Turnkey LinuxavionadoAún no hay calificaciones
- pps2014 Es Lores PDFDocumento96 páginaspps2014 Es Lores PDFNaranj'o Jos'eAún no hay calificaciones
- Mantenimiento Autonomo 2022Documento36 páginasMantenimiento Autonomo 2022André Ponce Bautista100% (1)
- Fundamentos Del Procesamiento Digital de Señal - (DSPDocumento40 páginasFundamentos Del Procesamiento Digital de Señal - (DSPAlberto Hai ReAún no hay calificaciones
- Pentesting en Entornos ControladosDocumento56 páginasPentesting en Entornos ControladosSony EscriAún no hay calificaciones
- Metodos de Muestreo de AceiteDocumento3 páginasMetodos de Muestreo de AceiteHenrry Manuel Rayme VenturaAún no hay calificaciones
- 96-ES8913A Bar PullerDocumento54 páginas96-ES8913A Bar Pullercesar_abddAún no hay calificaciones
- Manual PLC PrincipianteDocumento40 páginasManual PLC PrincipianteAlberto EsquivelAún no hay calificaciones
- IELE 2402-1 Programa - Comunicaciones - 202010 PDFDocumento4 páginasIELE 2402-1 Programa - Comunicaciones - 202010 PDFMiguel CasalinsAún no hay calificaciones
- Silabo-Programación Distribuida 2013-IDocumento7 páginasSilabo-Programación Distribuida 2013-ISaul Carrion ArevaloAún no hay calificaciones
- Analisis Variacional de EDPsDocumento5 páginasAnalisis Variacional de EDPsJosé Manuel JiménezAún no hay calificaciones
- UntitledDocumento17 páginasUntitledManuel RivasAún no hay calificaciones
- Evaluacion-DL MLDocumento1 páginaEvaluacion-DL MLManuel RivasAún no hay calificaciones
- Dios Salva Pecadores Una Expos - Oskar Arocha 1 1 1 1 1 1 1 1 1 1 1 1 1 1Documento5 páginasDios Salva Pecadores Una Expos - Oskar Arocha 1 1 1 1 1 1 1 1 1 1 1 1 1 1Manuel RivasAún no hay calificaciones
- Airaos Pero No PequéisDocumento21 páginasAiraos Pero No PequéisManuel RivasAún no hay calificaciones
- Redes Artificiales PrincipalesDocumento54 páginasRedes Artificiales PrincipalesManuel RivasAún no hay calificaciones
- Calibrador de ManómetroDocumento13 páginasCalibrador de ManómetroManuel Rivas100% (1)
- Triptico COMPARACION DE FRACCIONESDocumento2 páginasTriptico COMPARACION DE FRACCIONESraquelAún no hay calificaciones
- Establecimiento Del Alcance Del SistemaDocumento28 páginasEstablecimiento Del Alcance Del SistemaElsy Z VargasAún no hay calificaciones
- Tolerancias de Forma y PosiciónDocumento12 páginasTolerancias de Forma y PosiciónJose HernandezAún no hay calificaciones
- Murj 01Documento3 páginasMurj 01Jorge Méndez PeñalverAún no hay calificaciones
- Trabajo2 - Base Fisica de La VidaDocumento12 páginasTrabajo2 - Base Fisica de La VidaRichard David Chanta MontalvoAún no hay calificaciones
- Normativa EmasesaDocumento113 páginasNormativa EmasesamessiahsAún no hay calificaciones
- Taller de Probabilidades AlumnosDocumento9 páginasTaller de Probabilidades AlumnosMISOL GALLEGUILLOS CALLEJASAún no hay calificaciones
- Bib1 U3 A2 GuglDocumento5 páginasBib1 U3 A2 GuglTavo Falcon Racho100% (2)
- TP1 ResolucionDocumento16 páginasTP1 ResolucionGabrielPeiterAún no hay calificaciones
- 4 - Clase de Practica Combinacion LinealcorregidaDocumento21 páginas4 - Clase de Practica Combinacion LinealcorregidaJose SanchezAún no hay calificaciones
- Ejemplo 4Documento23 páginasEjemplo 4Abigail Santos PinedaAún no hay calificaciones
- Prueba3 Fisica 3 C PautaDocumento8 páginasPrueba3 Fisica 3 C PautaAndres Rehbein MAún no hay calificaciones
- Previo 1 MircoondasDocumento12 páginasPrevio 1 MircoondasDónovan BacilioAún no hay calificaciones
- Roa AguileraDocumento19 páginasRoa AguileraMarco Antonio Guzmán CortésAún no hay calificaciones
- Archivo para Aplicar Normas de GordilloDocumento22 páginasArchivo para Aplicar Normas de GordilloExmaili Macz ReyAún no hay calificaciones
- Mapa Conceptual La InvestigacionDocumento2 páginasMapa Conceptual La InvestigacionKenia AtenciaAún no hay calificaciones
- Tuberias y CanalDocumento48 páginasTuberias y CanalWilson WilliamAún no hay calificaciones
- Volumen II-5 GeofisícaDocumento46 páginasVolumen II-5 GeofisícaMayane ArelyAún no hay calificaciones
- FT BarrasDocumento8 páginasFT BarrasEd GonzalesAún no hay calificaciones
- Semana 01 - GeografíaDocumento3 páginasSemana 01 - GeografíaYasser MedinaAún no hay calificaciones
- 2.-Introduccion A Diagramas de Cortantes y MomentosDocumento7 páginas2.-Introduccion A Diagramas de Cortantes y MomentosITZEL ANDREA VAZQUEZ RAFAELAún no hay calificaciones
- Prueba Autoevaluacion - ArmonicosDocumento10 páginasPrueba Autoevaluacion - ArmonicosDiego Rodríguez QuezadaAún no hay calificaciones
- 4 Coeficiente de Aporte de Materiales CorreDocumento61 páginas4 Coeficiente de Aporte de Materiales CorreRenzo Edu QuiñonesAún no hay calificaciones
- Directorio Programas CAMDocumento63 páginasDirectorio Programas CAMM DZAún no hay calificaciones
- Dinamica de Una ParticulaDocumento38 páginasDinamica de Una Particulapedro100% (1)
- Tema 1 - Materiales Utilizados en La Construcción de CalzadasDocumento310 páginasTema 1 - Materiales Utilizados en La Construcción de CalzadasGuillermina CostaAún no hay calificaciones
- Función Sales para Tercer Grado de SecundariaDocumento4 páginasFunción Sales para Tercer Grado de SecundariaJohanValleIngaAún no hay calificaciones
- Importar Datos Con Estacion TotalDocumento13 páginasImportar Datos Con Estacion TotalJesusMaguiñaAún no hay calificaciones
- Estudio Comparativo Entre Una Subestación Eléctrica Convencional Versus Una Subestación Eléctrica Digital.Documento8 páginasEstudio Comparativo Entre Una Subestación Eléctrica Convencional Versus Una Subestación Eléctrica Digital.Gilberto BejaranoAún no hay calificaciones