También podría gustarte
- Banco de TransformadoresDocumento8 páginasBanco de TransformadoresSamuel SayAún no hay calificaciones
- Anexo - Curriculum Montajes EmeltaDocumento38 páginasAnexo - Curriculum Montajes EmeltaOscar Bravo100% (1)
- Capacitacion de Uso de ExtintoresDocumento34 páginasCapacitacion de Uso de ExtintoresDanni SevenantsAún no hay calificaciones
- Sistemas ComplejosDocumento10 páginasSistemas ComplejosalanAún no hay calificaciones
- Mapa MentalDocumento3 páginasMapa MentalElita Paulino ReyesAún no hay calificaciones
- Conexion Corta y LargaDocumento6 páginasConexion Corta y LargaMaxi VegaAún no hay calificaciones
- UnedDocumento5 páginasUnedJorgeSB91Aún no hay calificaciones
- Aih 07 1 006 PDFDocumento22 páginasAih 07 1 006 PDFmemememeAún no hay calificaciones
- Todo Sobre Integrales ImpropiasDocumento49 páginasTodo Sobre Integrales ImpropiasJaviera RiveraAún no hay calificaciones
- Guia de Examenes UNEDDocumento1 páginaGuia de Examenes UNEDmemememeAún no hay calificaciones
- Precios Ade 2019 UNEDDocumento2 páginasPrecios Ade 2019 UNEDLauAún no hay calificaciones
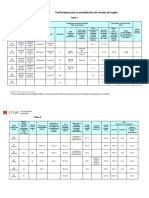
- Guia para Certificar InglesDocumento3 páginasGuia para Certificar InglesmemememeAún no hay calificaciones
- Actividades de Evaluación Estructuras Algebraicas (Modo de Compatibilidad)Documento5 páginasActividades de Evaluación Estructuras Algebraicas (Modo de Compatibilidad)memememeAún no hay calificaciones
- Intervalos de ConvergenciaDocumento49 páginasIntervalos de ConvergenciaAndrés Emiliano RodriguezAún no hay calificaciones
- Ana1 6 PDFDocumento62 páginasAna1 6 PDFJerinson J Polanco ZamudioAún no hay calificaciones
- Redes BayesianasDocumento37 páginasRedes BayesianasDenilson Casaverde QuispeAún no hay calificaciones
- DerivadasDocumento53 páginasDerivadasLuis TelloAún no hay calificaciones
- FF1 PEC2 Dic2013 SolucionDocumento5 páginasFF1 PEC2 Dic2013 SolucionmemememeAún no hay calificaciones
- Sucesiones PDFDocumento54 páginasSucesiones PDFAndresChacanaAún no hay calificaciones
- FSD - Preguntas TestDocumento48 páginasFSD - Preguntas TestmemememeAún no hay calificaciones
- Plan de Trabajo de Matemática DiscretaDocumento10 páginasPlan de Trabajo de Matemática DiscretamemememeAún no hay calificaciones
- Algebra ResoltDocumento78 páginasAlgebra ResoltmemememeAún no hay calificaciones
- PEC2 - Fisica I 17-18Documento6 páginasPEC2 - Fisica I 17-18memememeAún no hay calificaciones
- Ejercicios 01-05Documento35 páginasEjercicios 01-05memememeAún no hay calificaciones
- Examen Matemática Discreta UNEDDocumento1 páginaExamen Matemática Discreta UNEDmemememeAún no hay calificaciones
- Guia Estudio Grado Mineria Datos Parte 2-1 UNEDDocumento26 páginasGuia Estudio Grado Mineria Datos Parte 2-1 UNEDmemememeAún no hay calificaciones
- Tema 7Documento2 páginasTema 7memememeAún no hay calificaciones
- 01 - Algoritmos de División y EuclidesDocumento8 páginas01 - Algoritmos de División y EuclidesmemememeAún no hay calificaciones
- Teoría de La Evolución en La Medicina 2010Documento12 páginasTeoría de La Evolución en La Medicina 2010memememeAún no hay calificaciones
- Examen de La Revisión de Septiembre de 2016 de Álgebra Lineal I (UNED)Documento1 páginaExamen de La Revisión de Septiembre de 2016 de Álgebra Lineal I (UNED)memememeAún no hay calificaciones
- Ejercicios Propuestos Foro 4 Soluciones RevisadoDocumento5 páginasEjercicios Propuestos Foro 4 Soluciones RevisadomemememeAún no hay calificaciones
- Examen Matemática Discreta UNED.Documento1 páginaExamen Matemática Discreta UNED.memememeAún no hay calificaciones
- Ejercicios Propuestos Foro 1 SolucionesDocumento3 páginasEjercicios Propuestos Foro 1 SolucionesmemememeAún no hay calificaciones
- Ejercicios Tema 8Documento1 páginaEjercicios Tema 8memememeAún no hay calificaciones
- Ejercicios Propuestos - Tema 6Documento5 páginasEjercicios Propuestos - Tema 6memememeAún no hay calificaciones
- Examen de Matemática Discreta - UNEDDocumento1 páginaExamen de Matemática Discreta - UNEDmemememeAún no hay calificaciones
- 7 DesperdiciosDocumento9 páginas7 DesperdiciosEstefanía Salazar RamírezAún no hay calificaciones
- Plan de Negocio I PARTE - Uva Red GlobeDocumento35 páginasPlan de Negocio I PARTE - Uva Red GlobeEdwin ArroyoAún no hay calificaciones
- I.E.E 1278 Mixto La Molina: Indice de Masa CorporalDocumento3 páginasI.E.E 1278 Mixto La Molina: Indice de Masa CorporalInfante Ramos JackAún no hay calificaciones
- Actividad Eje 2 Estrategias GerencialesDocumento21 páginasActividad Eje 2 Estrategias GerencialesDaniel BarajasAún no hay calificaciones
- Ficha Juegos PicasDocumento3 páginasFicha Juegos PicaserkampillosAún no hay calificaciones
- Directorio Entes Reguladores BPMDocumento6 páginasDirectorio Entes Reguladores BPMEdwin Alfonso Gonzalez EscobarAún no hay calificaciones
- Determinación de Cobre en Soluciones de ElectrolitosDocumento4 páginasDeterminación de Cobre en Soluciones de ElectrolitosFranco Andres Montecinos GonzalezAún no hay calificaciones
- Taller de EstabilidadDocumento2 páginasTaller de EstabilidadAlejandroAún no hay calificaciones
- Ideas Sobre La Ciencia e Ideas Sobre El Lenguaje Sutton1997 PDFDocumento11 páginasIdeas Sobre La Ciencia e Ideas Sobre El Lenguaje Sutton1997 PDFgazton_73Aún no hay calificaciones
- Lacasadebernarda LorcaDocumento88 páginasLacasadebernarda LorcaRomi RoderaAún no hay calificaciones
- Descola. Lo Salvaje y Lo DomésticoDocumento18 páginasDescola. Lo Salvaje y Lo DomésticoDaniela GonzalezAún no hay calificaciones
- 18 Julio 2013Documento15 páginas18 Julio 2013LCMDPAún no hay calificaciones
- Plan de Trabajo Reubicacion de PostesDocumento4 páginasPlan de Trabajo Reubicacion de PostesNestor Huan LupAún no hay calificaciones
- Informe CompletoDocumento50 páginasInforme CompletogusticoncariAún no hay calificaciones
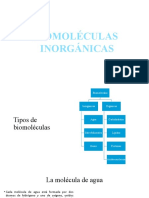
- Biomoleculas InorganicasDocumento12 páginasBiomoleculas InorganicasNicolás Fáez VillalobosAún no hay calificaciones
- Ejercicios Plan Maestro de ProduccionDocumento4 páginasEjercicios Plan Maestro de ProduccionenriqueAún no hay calificaciones
- Triptico de Las Ecorregiones Del PerúDocumento2 páginasTriptico de Las Ecorregiones Del PerúFranccesca W. RojasAún no hay calificaciones
- Plan de Manejo Ambiental para Control de RuidoDocumento12 páginasPlan de Manejo Ambiental para Control de RuidoCarlos GomezAún no hay calificaciones
- Sistema Segmentario PDFDocumento1 páginaSistema Segmentario PDFAlejandra PiedrahitaAún no hay calificaciones
- Eva. Acumulativa-8º-Cuarto PeriodoDocumento5 páginasEva. Acumulativa-8º-Cuarto Periodojose fernandoAún no hay calificaciones
- Ritual de Union Con Santa Barbara y Varios..Documento1 páginaRitual de Union Con Santa Barbara y Varios..mumusalazarAún no hay calificaciones
- Unidad II Geometria Descriptiva Yorman Morales PDFDocumento9 páginasUnidad II Geometria Descriptiva Yorman Morales PDFYorman MoralesAún no hay calificaciones
- Fallas Del Proceso Sancionatorio Ambiental en ColombiaDocumento4 páginasFallas Del Proceso Sancionatorio Ambiental en ColombiaYesica Hernandez BotiaAún no hay calificaciones
- Historia de El SalvadorDocumento7 páginasHistoria de El SalvadorFredDo GonzálezAún no hay calificaciones