Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Monografia
Cargado por
Fabio Herencia CastilloDerechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Monografia
Cargado por
Fabio Herencia CastilloCopyright:
Formatos disponibles
FACULTAD DE
INGENIERA,
ARQUITECTURA Y
URBANISMO
LECTURA Y REDACCIN
ESCUELA DE
INGENIERA
MECNICA Y
ELCTRICA
13 06 - 2011
LECTURA Y REDACCIN
2011
AUTOMATISMO
ELECTRICOS.
RELS Y
CONTACTORES
Herencia Castillo Fabio
Pagina 2
LECTURA Y REDACCIN
2011
TABLA DE CONTENIDO
AUTOMATISMO ELECTRICOS. RELS Y CONTACTORES.......................5
1. Objetivos de la Automatizacin.............................................5
2. Introduccin........................................................................5
3. Historia de la Automatizacin...............................................6
4. Grado de Automatizacin......................................................8
5. Elementos de una Instalacin Automatizada..........................9
5.1.
Maquinas:.................................................................................................... 9
5.2.
Accionadores:............................................................................................... 9
5.2.1.
Accionadores Elctricos:.........................................................................10
5.2.2.
Accionadores Neumticos:......................................................................10
5.2.3.
Accionadores Hidrulicos:.......................................................................10
5.2.4.
Pre Accionadores:.................................................................................10
5.3.
Captadores:................................................................................................ 10
5.4.
Interfaz Hombre Maquina:..............................................................................10
5.5.
Elementos de Mando:....................................................................................10
5.5.1.
Parte de Mando:....................................................................................10
5.5.2.
Parte Operativa:....................................................................................10
6. Partes constituyentes de los circuitos de automatismo
elctricos................................................................................10
6.1.
Contactor:.................................................................................................. 11
6.1.1.
Clasificacin........................................................................................12
6.1.1.1. Por el tipo de accionamiento:................................................................12
6.1.1.2. Por la disposicin de los contactos:.........................................................12
6.1.1.3. Por los Lmites de Tensin....................................................................13
6.1.1.4. Por la clase de corriente.......................................................................13
6.1.2.
Partes importantes de los Contactores.........................................................13
6.1.2.1. El Electroimn:.................................................................................13
6.1.2.2. La Bobina:.......................................................................................13
6.1.2.3. Los Polos:.......................................................................................14
6.1.3.
Los Contactos Auxiliares:........................................................................14
6.1.4.
Simbologa y referenciado.......................................................................14
6.1.5.
Principios de funcionamiento del contactor electromagntico............................15
6.1.6.
Eleccin de un contactor electromagntico...................................................16
6.1.6.1. Criterios de eleccin de un contactor.......................................................16
6.2.
Rels........................................................................................................ 18
6.2.1.
Rels de Mando....................................................................................18
6.2.1.1. Rels electromecnicos:......................................................................18
6.2.1.2. Polarizados......................................................................................19
6.2.1.3. Reed inversores.................................................................................19
6.2.1.4. Rels de estado slido.........................................................................20
6.2.1.5. Rels temporizadores..........................................................................20
6.3.
Elementos de sealizacin y mando...................................................................21
6.3.1.
Elementos de sealizacin.......................................................................21
6.3.1.1. Sealizacin Luminosa:.......................................................................21
6.3.1.2. Sealizacin Acstica:........................................................................21
Herencia Castillo Fabio
Pagina 3
LECTURA Y REDACCIN
2011
6.3.1.3. Sealizacin ptica:...........................................................................21
6.3.2.
Elementos de Mando..............................................................................21
6.3.2.1. Accionamiento Manual:......................................................................22
6.3.2.2. Accionamiento Automtico:.................................................................22
7. Conclusiones......................................................................22
8. Referencias Bibliogrficas...................................................23
Herencia Castillo Fabio
Pagina 4
LECTURA Y REDACCIN
2011
AUTOMATISMO ELECTRICOS. RELS Y
CONTACTORES
1. Objetivos de la Automatizacin.
Integrar varios aspectos de las operaciones de manufactura para:
Mejorar la calidad y uniformidad del producto.
Minimizar el esfuerzo y los tiempos de produccin.
Mejorar la productividad reduciendo los costos de manufactura mediante
un mejor control de la produccin.
Mejorar la calidad mediante procesos repetitivos.
Reducir la intervencin humana, el aburrimiento y posibilidad de error
humano.
Reducir el dao en las piezas que resultara del manejo manual.
Aumentar la seguridad para el personal.
Ahorrar rea en la planta haciendo ms eficiente:
El arreglo de las mquinas.
El flujo de material.
2. Introduccin.
Automatizacin Industrial (automatizacin; del griego antiguo auto: guiado
por uno mismo) es el uso de sistemas o elementos computarizados y
electromecnicos para controlar maquinarias y/o procesos industriales
sustituyendo a operadores humanos.
El alcance va ms all que la simple mecanizacin de los procesos ya que sta
provee a operadores humanos mecanismos para asistirlos en los esfuerzos fsicos
del trabajo, la automatizacin reduce ampliamente la necesidad sensorial y
mental del humano. La automatizacin como una disciplina de la ingeniera es
ms amplia que un mero sistema de control, abarca la instrumentacin industrial,
que incluye los sensores y transmisores de campo, los sistemas de control y
supervisin, los sistema de transmisin y recoleccin de datos y las aplicaciones
de software en tiempo real para supervisar y controlar las operaciones de plantas
o procesos industriales.
Por el momento existen muchos trabajos donde no existe riesgo inmediato de la
automatizacin. Ningn dispositivo ha sido inventado que pueda competir contra
el ojo humano para la precisin y certeza en muchas tareas; tampoco el odo
humano. El menos capacitado de los seres humanos puede identificar y
distinguir mayor cantidad de esencias que cualquier dispositivo automtico. Las
habilidades para el patrn de reconocimiento humano, reconocimiento de
Herencia Castillo Fabio
Pagina 5
LECTURA Y REDACCIN
2011
lenguaje y produccin de lenguaje se encuentran ms all de cualquier
expectativa de los ingenieros de automatizacin.
3. Historia de la Automatizacin.
El origen se remonta a los aos 1750, cuando surge la revolucin industrial.
1745: Mquinas de tejido controladas por tarjetas perforadas.
1817-1870: Mquinas especiales para corte de metal.
1863: Primer piano automtico, inventado por M. Fourneaux.
1856-1890: Sir Joseph Whitworth enfatiza la necesidad de piezas
intercambiables.
1870: Primer torno automtico, inventado por Christopher Spencer.
1940: Surgen los controles hidrulicos, neumticos y electrnicos para
mquinas de corte automticas.
1945-1948: John Parsons comienza investigacin sobre control numrico.
1960-1972: Se desarrollan tcnicas de control numrico directo y
manufactura computadorizada.
Para la automatizacin de procesos, se desarrollaron mquinas operadas con
Controles Programables (PLC), actualmente de gran ampliacin en industrias
como la textil y la alimentacin.
Para la informacin de las etapas de diseo y control de la produccin se
desarrollaron programes de computacin para el dibujo (CAD), para el diseo
(CADICAE), para la manufactura CAM, para el manejo de proyectos, para la
planeacin de requerimientos, para la programacin de la produccin, para el
control de calidad, etc.
La insercin de tecnologas de la informacin produccin industrial de los pases
desarrollados ha conocido un ritmo de crecimiento cada vez ms elevado en los
ltimos aos. Por ejemplo, la Informacin amplia enormemente la capacidad de
controlar la produccin con mquinas de control computarizado y permite
avanzar hacia mayores y ms complejos sistemas de automatizacin, unas de
cuyas expresiones ms sofisticadas y ms ahorradoras de trabajo humano directo
son los robots, los sistemas flexibles de produccin y los sistemas de
automatizacin integrada de la produccin (computer integrad manufacturing
CIM).
Aunque es evidente que la automatizacin sustituye a un alto porcentaje de la
fuerza laboral no calificada, reduciendo la participacin de los salarios en total
de costos de produccin, las principales razones para automatizar no incluye
necesariamente la reduccin del costo del trabajo.
Por otra parte, la automatizacin electromecnica tradicional ya ha reducido
significativamente la participacin de este costo en los costos de produccin.
Actualmente en Estados Unidos la participacin tpica el trabaj directo en el
costo de le produccin Industriales de 10 % o 15 % y en algunos productos de 5
Herencia Castillo Fabio
Pagina 6
LECTURA Y REDACCIN
2011
%. Por otra parte, existen otros costos, cuya reduccin es lo que provee
verdadera competitividad a la empresa.
Entre estos costos est trabajo indirecto, administracin control de calidad
compras de insumos, flujos de informacin, demoras de proveedores, tiempos
muertos por falta de flexibilidad y adaptabilidad etc. Estos son los costos que
pueden ser reducidos por las nuevas tecnologas de automatizacin al permitir
mayor continuidad, Intensidad y control Integrado del proceso de produccin,
mejor calidad del producto y reduccin significativa de errores y rechazos, y a la
mayor flexibilidad y adaptabilidad de la produccin a medida y en pequeos
lotes o pequeas escalas de produccin.
La mayor calidad en los productos se logra mediante exactitud de las mquinas
automatizadas y por la eliminacin de los errores propios del ser humano; lo que
a su vez repercute grandes ahorros de tiempo y materia al eliminarse la
produccin de piezas defectuosas.
La flexibilidad de las mquinas permite su fcil adaptacin tanto a una
produccin individualizadas y diferenciada en le misma linee de produccin,
como mi cambio total de la produccin. Esto posibilite una adecuacin flexible a
las diversas demandas del mercado.
La automatizacin en los procesos Industriales, se basa en la capacidad para
controlar la informacin necesaria en el proceso productivo, mediante la ex
ancle de mecanismos de medicin y evaluacin de las normas de produccin. A
travs de diversos instrumentos controlados por la informacin suministrada por
el computadora, se regula el funcionamiento de las mquinas u otros elementos
que operan el proceso productivo.
En concreto, este sistema funciona bsicamente de la siguiente manera:
Mediante la utilizacin de captadores o sensores (que son esencialmente
instrumentos de medicin, como termmetros o barmetros), se recibe la
informacin sobra el funcionamiento de las variables que deben ser controladas
(temperatura, presin, velocidad, espesor o cualquier otra que pueda
cuantificarse), esta informacin se convierte en una seal, que es comparada por
medio de la computadora con la norma, consigna, o valor deseado para
determinada variable. Si esta seal no concuerda con la norma de Inmediato se
genere una seal de control (que es esencialmente una nueva Instruccin), por la
que so acciona un actuador o ejecutante (que generalmente son vlvulas y
motores), el que convierte la seal de control en una accin sobre el proceso de
produccin capaz de alterar la seal original imprimindole el valor o la
direccin deseada.
En la prctica, la automatizacin de la industria alcanza diferentes niveles y
grados ya que la posibilidad concrete de su implementacin en los procesos de
Herencia Castillo Fabio
Pagina 7
LECTURA Y REDACCIN
2011
fabricacin industrial varia considerablemente segn se trate de procesos de
produccin continua o en serie. En efecto, en el primer caso, el primer caso, el
conducto es el resultado de una serie de operaciones secuenciales,
predeterminadas en su orden, poco numerosas, y que requieren su Integracin en
un flujo continuo de produccin.
Los principales aportes de la microelectrnica a este tipo de automatizacin son
los mecanismos de control de las diversas fases o etapas productivas y la
creciente capacidad de control integrado de todo el proceso productivo. Por su
parte, la produccin en serle est formada por diversas operaciones productivas,
generalmente paralelas entre si o realizadas en diferentes perodos de tiempos o
sitios de trabajo, lo que ha dificultado la integracin de lneas de produccin
automatizacin. Desde mediados de los aos setenta las posibilidades de
automatizacin integrada han aumentado rpidamente gracias a lo adelantos en
la robtica, en las mquinas herramienta de control numrico, en los sistemas
flexibles de produccin, y en el diseo y manufactura asistidos por computadora
(CAD/CAM).
4. Grado de Automatizacin.
La importancia de la automatizacin, se distinguen los siguientes grados:
Aplicaciones en pequea escala como mejorar el funcionamiento de una
mquina en orden:
Mayor utilizacin de una mquina, mejorando del sistema de alimentacin.
Posibilidad de que un hombre trabaje con ms de una mquina.
Coordinar o controlar una serie de operaciones y una serie de magnitudes
simultneamente.
Realizar procesos totalmente continuos por medio de secuencias
programadas.
Procesos automticos en cadena errada con posibilidad de autocontrol y
auto correccin de desviaciones.
La automatizacin no siempre se justifica la implementacin de sistemas de
automatizacin, pero existen ciertas seales indicadoras que justifican y hacen
necesario la implementacin de estos sistemas, los indicadores principales son
los siguientes:
Requerimientos de un aumento en la produccin.
Requerimientos de una mejora en la calidad de los productos.
Necesidad de bajar los costos de produccin.
Escasez de energa.
Encarecimiento de la materia prima.
Necesidad de proteccin ambiental.
Necesidad de brindar seguridad al personal.
Desarrollo de nuevas tecnologas.
Herencia Castillo Fabio
Pagina 8
LECTURA Y REDACCIN
2011
La automatizacin solo es viable si al evaluar los beneficios econmicos y
sociales de las mejoras que se podran obtener al automatizar, estas son mayores
a los costos de operacin y mantenimiento del sistema.
La automatizacin de un proceso frente al control manual del mismo proceso,
brinda ciertas ventajas y beneficios de orden econmico, social, y tecnolgico,
pudindose resaltar las siguientes:
Se asegura una mejora en la calidad del trabajo del operador y en el
desarrollo del proceso, esta depender de la eficiencia del sistema
implementado.
Se obtiene una reduccin de costos, puesto que se racionaliza el trabajo, se
reduce el tiempo y dinero dedicado al mantenimiento.
Existe una reduccin en los tiempos de procesamiento de informacin.
Flexibilidad para adaptarse a nuevos productos (fabricacin flexible y
multifabricacin).
Se obtiene un conocimiento ms detallado del proceso, mediante la
recopilacin de informacin y datos estadsticos del proceso.
Se obtiene un mejor conocimiento del funcionamiento y performance de los
equipos y mquinas que intervienen en el proceso.
Factibilidad tcnica en procesos y en operacin de equipos.
Factibilidad para la implementacin de funciones de anlisis, optimizacin y
autodiagnstico.
Aumento en el rendimiento de los equipos y facilidad para incorporar
nuevos equipos y sistemas de informacin.
Disminucin de la contaminacin y dao ambiental.
Racionalizacin y uso eficiente de la energa y la materia prima.
Aumento en la seguridad de las instalaciones y la proteccin a los
trabajadores.
5. Elementos de una Instalacin Automatizada.
5.1. Maquinas:
Son los equipos mecnicos que realizan los procesos,
transformaciones, etc. de los productos o materia prima.
traslados,
5.2. Accionadores:
Son equipos acoplados a las mquinas, y que permiten realizar movimientos,
calentamiento, ensamblaje, embalaje. Pueden ser:
5.2.1. Accionadores Elctricos:
Usan la energa elctrica, son por ejemplo, electro vlvulas, motores,
resistencias, cabezas de soldadura, etc.
Herencia Castillo Fabio
Pagina 9
LECTURA Y REDACCIN
2011
5.2.2. Accionadores Neumticos:
Usan la energa del aire comprimido, son por ejemplo, cilindros, vlvulas,
etc.
5.2.3. Accionadores Hidrulicos:
Usan la energa de la presin del agua, se usan para controlar velocidades
lentas pero precisas.
5.2.4. Pre Accionadores:
Se usan para comandar y activar los accionadores. Por ejemplo, contactores,
switchs, variadores de velocidad, distribuidores neumticos, etc.
5.3. Captadores:
Son los sensores y transmisores, encargados de captar las seales necesarias
para conocer los estados del proceso, y luego enviarlas a la unidad de control.
5.4. Interfaz Hombre Maquina:
Permite la comunicacin entre el operario y el proceso, puede ser una interfaz
grfica de computadora, pulsadores, teclados, visualizadores, etc.
5.5. Elementos de Mando:
Son los elementos de clculo y control que gobiernan el proceso, se denominan
autmata, y conforman la unidad de control.
Los sistemas automatizados se conforman de dos partes: parte de mando y
parte operativa.
5.5.1. Parte de Mando:
Es la estacin central de control o autmata. Es el elemento principal del
sistema, encargado de la supervisin, manejo, correccin de errores,
comunicacin, etc.
5.5.2. Parte Operativa:
Es la parte que acta directamente sobre la mquina, son los elementos que
hacen que la mquina se mueva y realice las acciones. Son por ejemplo, los
motores, cilindros, compresoras, bombas, rels, etc.
6. Partes constituyentes de los circuitos de automatismo elctricos.
6.1. Contactor:
El contactor electromagntico es un aparato mecnico de conexin controlado
mediante electroimn y con funcionamiento todo o nada. Cuando la bobina del
electroimn est bajo tensin, el contactor se cierra, estableciendo a travs de
los polos un circuito entre la red de alimentacin y el receptor. El
desplazamiento de la parte mvil del electroimn que arrastra las partes
Herencia Castillo Fabio
Pagina 10
LECTURA Y REDACCIN
2011
mviles de los polos y de los contactos auxiliares o, en determinados casos, del
dispositivo de control de stos, puede ser:
Rotativo, girando sobre un eje,
Lineal, deslizndose en paralelo a las partes fijas,
Una combinacin de ambos.
Cuando se interrumpe la alimentacin de la bobina, el circuito magntico se
desmagnetiza y el contactor se abre por efecto de:
Los resortes de presin de los polos y del resorte de retorno de la armadura
mvil,
La fuerza de gravedad, en determinados aparatos (las partes mviles recuperan
su posicin de partida).
El contactor ofrece numerosas ventajas, entre las que destacan la
posibilidad de:
Interrumpir las corrientes monofsicas o polifsicas elevadas accionando
un auxiliar de mando recorrido por una corriente de baja intensidad.
Funcionar tanto en servicio intermitente como en continuo,
Controlar a distancia de forma manual o automtica, utilizando hilos de
seccin pequea o acortando significativamente los cables de potencia,
Aumentar los puestos de control y situarlos cerca del operario.
A estas caractersticas hay que aadir que el contactor:
Es muy robusto y fiable, ya que no incluye mecanismos delicados,
Se adapta con rapidez y facilidad a la tensin de alimentacin del circuito
de control (cambio de bobina),
Garantiza la seguridad del personal contra arranques inesperados en caso
de interrupcin de corriente momentnea (mediante pulsadores de control),
Facilita la distribucin de los puestos de paro de emergencia y de los
puestos esclavos, impidiendo que la mquina se ponga en marcha sin que
se hayan tomado todas las precauciones necesarias.
Protege el receptor contra las cadas de tensin importantes (apertura
instantnea por debajo de una tensin mnima).
Puede incluirse en equipos de automatismos sencillos o complejos.
6.1.1. Clasificacin.
Se puede establecer diversas clasificaciones de los contactores segn la
clase de corriente que las acciona, segn su principio de funcionamiento, la
configuracin de sus contactos y sus valores limites de tensin.
Seguidamente vamos a enumerar y estudiar algunos aspectos de su
funcionamiento, as como veremos los tipos diferenciados en cada
clasificacin.
Herencia Castillo Fabio
Pagina 11
LECTURA Y REDACCIN
6.1.1.1.
2011
Por el tipo de accionamiento:
Contactores neumticos:
Su principio de funcionamiento esta basado en la accin de gases
Contactores Neumticos y Electromecnicos:
En estos contactores su activacin se origina por medio de procesos
mecnicos (muelles, balancines, etc.), en ellos la orden para que los
medios mecnicos realicen una funcin determinada se da distancia por
medios elctricos o electromagnticos como son los electroimanes.
Contactores Hidrulicos:
Son contactores que se diferencian de los mecnicos y electromagnticos
en que el sistema de accionamiento del mbolo es un liquido, por
ejemplo aceite, agua, etc. Las instalaciones auxiliares que precisan son
costosas y de gran envergadura, hacindolos a veces antieconmicos para
los fines que se pretenden. Disponen de accionamientos por
electrovlvulas, por lo que se podran denominar contactores
electrohidrulicos.
Contactores Electromagnticos:
Son aquellos en los que su accionamiento se realiza a travs de un
electroimn. Son actualmente los mas usados, por esta razn le
dedicaremos un apartado en el que se explicaran todos sus detalles tanto
co0nstructivo como de funcionamiento.
6.1.1.2.
Por la disposicin de los contactos:
Contactores al Aire:
En ellos la ruptura se produce en el seno del aire.
Contactores al Aceite:
En este caso la ruptura se realiza dentro de aceite. Los de baja tensin y
potencia estn en desuso pero aun podemos encontrar algunos ruptores
de media tensin que realizan la ruptura en medios aceitosos.
Herencia Castillo Fabio
Pagina 12
LECTURA Y REDACCIN
2011
Contactores en Ambiente Gaseoso:
La ruptura en estos contactores se produce en ambientes gaseosos. Se
aconseja su empleo para elevadas tensiones, son usados muy
frecuentemente como seccionadores.
6.1.1.3.
Por los Lmites de Tensin.
Los lmites de tensin son los lmites que pueden aguantar sus contactos.
Los hay de dos tipos:
Contactores de Alta Tensin:
Son los que sus contactos son capaces de soportar tensiones superiores a
los 1000V.
Contactores de Baja Tensin:
En este caso sus contactos son capaces de soportar como mximo hasta
tensiones de 1000V.
6.1.1.4.
Por la clase de corriente.
Solo tienen cabida en esta clasificacin los contactores del tipo
electromagnticos; los hay de dos clases:
Contactores de Corriente Alterna:
La bobina del circuito magntico es alimentada con corriente alterna.
Contactores de Corriente Continua:
La bobina de su circuito magntico se alimenta con corriente continua.
6.1.2. Partes importantes de los Contactores.
6.1.2.1.
El Electroimn:
Es el elemento motor del contactor. Sus elementos ms importantes son
el circuito magntico y la bobina. Se presenta bajo distintas formas en
funcin del tipo de contactor e incluso del tipo de corriente de
alimentacin, alterna o continua.
6.1.2.2.
La Bobina:
Es la que genera el flujo magntico necesario para atraer la armadura
mvil del electroimn. Puede estar montada en una rama del circuito
magntico o, excepcionalmente, en dos, segn el modelo de contactor.
Est diseada para soportar los choques mecnicos que provocan el
cierre y la apertura de los circuitos magnticos y los choques
electromagnticos que se producen cuando la corriente recorre las
espiras. Para atenuar los choques mecnicos, la bobina o el circuito
magntico, y en algunos casos ambos, estn montados sobre unos
amortiguadores.
Herencia Castillo Fabio
Pagina 13
LECTURA Y REDACCIN
6.1.2.3.
2011
Los Polos:
La funcin de los polos consiste en establecer o interrumpir la corriente
dentro del circuito de potencia. Estn dimensionados para que pase la
corriente nominal del contactor en servicio permanente sin
calentamientos anmalos. Consta de una parte fija y una parte mvil.
Esta ltima incluye unos resortes que transmiten la presin correcta a los
contactos que estn fabricados con una aleacin de plata con una
excepcional resistencia a la oxidacin, mecnica y al arco.
6.1.3. Los Contactos Auxiliares:
Realizan las funciones de automantenimiento, esclavizacin, enclavamiento
de los contactores y sealizacin. Existen cuatro tipos bsicos:
Contactos instantneos de cierre NA, abiertos (no pasantes) cuando el
contactor est en reposo, y cerrados (pasantes) cuando el electroimn
est bajo tensin.
Contactos instantneos de apertura NC, cerrados (pasantes) cuando el
contactor est en reposo, y abiertos (no pasantes) cuando el electroimn
est bajo tensin.
Contactos instantneos NA/NC. Cuando el contactor est en reposo, el
contacto NA se encuentra en estado no pasante y el contacto NC en
estado pasante. El estado de los contactos se invierte cuando se cierra el
contactor. Los dos contactos tienen un punto comn.
Los contactos temporizados NA o NC se establecen o se separan
cuando ha transcurrido un tiempo determinado despus del cierre o la
apertura del contactor que los activa. Este tiempo se puede regular.
6.1.4. Simbologa y referenciado.
Los bornes de conexin de los contactores se nombran mediante cifras o
cdigos de cifras y letras que permiten identificarlos, facilitando la
realizacin de esquemas y las labores de cableado.
Los contactos principales se referencian con una sola cifra, del 1 al 16.
Los contactos auxiliares estn referenciados con dos cifras. Las cifras
de unidades o cifras de funcin indican la funcin del contacto:
1 y 2, contacto normalmente cerrados (NC).
3 y 4, contacto normalmente abiertos (NA).
5 y 6, contacto de apertura temporizada.
7 y 8, contacto de cierre temporizado.
La cifra de las decenas indica el nmero de orden de cada contacto en el
contactor. En un lado se indica a qu contactor pertenece.
Las bobinas de un contactor se referencian con las letras A1 y A2. En su
parte inferior se indica a qu contactor pertenece.
Herencia Castillo Fabio
Pagina 14
LECTURA Y REDACCIN
2011
El contactor se denomina con las letras KM seguidas de un nmero de
orden.
Es necesario conocer las siguientes caractersticas del receptor:
La tensin nominal de funcionamiento, en voltios (V).
La corriente de servicio (Ie) que consume, en amperios (A).
Representacin
vertical de un
contacto
Representacin
horizontal de un
contacto
6.1.5. Principios de funcionamiento del contactor electromagntico.
A los contactos principales se conectan al circuito que se quiere gobernar.
Asegurando el establecimiento y cortes de las corrientes principales y segn
el nmero de vas de paso de corriente, ser bipolar, tripolar, tetrapolar, etc.
realizndose las maniobras simultneamente en todas las vas.
Los contactos auxiliares son de dos clases abiertos y cerrados. Estos forman
parte del circuito auxiliar del contactor y aseguran las autoalimentaciones,
los mandos, enclavamientos de contactos y sealizaciones en los equipos de
automatismo.
Cuando la bobina del contactor queda excitada por la circulacin de la
corriente, mueve el ncleo en su interior y arrastra los contactor principales
y auxiliares, estableciendo a travs de los polos el circuito entre la red y el
receptor. Este arrastre o desplazamiento puede ser:
Herencia Castillo Fabio
Pagina 15
LECTURA Y REDACCIN
2011
Por rotacin, pivote sobre su eje.
Por traslacin, deslizndose paralelamente a las partes fijas.
Combinacin de movimientos, rotacin y traslacin.
Cuando la bobina deja de ser alimentada, abre los contactos por efecto del
resorte de presin de los polos y del resorte de retorno de la armadura mvil.
La bobina est concebida para resistir los choque mecnicos provocados por
el cierre y la apertura de los contactos y los choques electromagnticos
debidos al paso de la corriente por sus espiras, con el fin de reducir los
choques mecnicos la bobina o circuito magntico, a veces los dos se
montan sobre amortiguadores.
Si se debe gobernar desde diferentes puntos, los pulsadores de marcha se
conectan en paralelo y el de parada en serie.
6.1.6. Eleccin de un contactor electromagntico.
Los fabricantes incluyen en sus catlogos tablas que permiten determinar el
calibre de los contactores en funcin del tipo general de aplicacin
(distribucin o control de motores) y de las tensiones y corrientes utilizadas.
Dichas tablas se establecen para:
Cadencias de funcionamiento < a 30 ciclos de maniobras por hora.
Una temperatura ambiente de 40 C.
Una tensin o 440 v.
En estas condiciones, un contactor puede conmutar una corriente igual a su
propia corriente asignada de empleo segn las categoras de empleo AC-1.
En los dems casos puede ser necesaria una desclasificacin, es decir,
utilizar un contactor de calibre superior que se determina consultando las
tablas o curvas correspondientes.
6.1.6.1.
Criterios de eleccin de un contactor
Elegir un contactor para una aplicacin concreta significa fijar la
capacidad de un aparato para establecer, soportar e interrumpir la
corriente en el receptor que se desea controlar, en unas condiciones de
utilizacin establecidas, sin recalentamientos ni desgaste excesivo de los
contactos. Para elegir correctamente el contactor hay que tener en cuenta:
El tipo y las caractersticas del circuito o del receptor que se desea
controlar: intensidad y tipo de corriente, tensin, regmenes transitorios
en la puesta bajo tensin, etc.
Las condiciones de explotacin:
Ciclos de maniobras/hora, factor de marcha, corte en vaco o en carga,
categora de empleo, tipo de coordinacin, durabilidad elctrica deseada,
etc.
Herencia Castillo Fabio
Pagina 16
LECTURA Y REDACCIN
2011
Las condiciones del entorno:
Temperatura ambiente, altitud cuando sea necesario, etc.
Control de un circuito resistivo:
Este tipo de aplicacin (por ejemplo resistencias de calentamiento)
pertenece a la categora de empleo AC-1, con un nmero de ciclos de
maniobras reducido. El calentamiento del contactor depende
principalmente de la corriente nominal del receptor y del tiempo de paso
de esta corriente.
Control de receptores con un pico de corriente transitorio elevado en
la puesta bajo tensin:
Este es el caso de, por ejemplo, los primarios de un transformador o de
las bateras de condensadores. La corriente de cresta en la puesta bajo
tensin de estos aparatos puede llegar a ser ms de diez veces superior a
la corriente nominal. El poder de cierre asignado del contactor debe ser lo
bastante alto como para que la fuerza de repulsin de la corriente
transitoria no provoque la apertura no controlada ni la soldadura e los
contactos. Este es pues el criterio bsico para la eleccin de un contactor
en este tipo de aplicacin.
Los fabricantes elaboran las tablas de eleccin teniendo en cuenta todos
estos criterios, lo que permite elegir cmodamente el contactor ms
apropiado para cada aplicacin.
Ejemplos de eleccin en funcin de las aplicaciones:
En los siguientes ejemplos los contactores se han elegido utilizando las
tablas de eleccin que figuran en nuestro catlogo general de producto.
Para cada tipo de aplicacin, dichas tablas se han elaborado teniendo en
cuenta las condiciones de explotacin y entorno ms habituales.
Permiten elegir el contactor ms apropiado rpidamente y sin necesidad
de clculos.
Los contactores tambin se pueden elegir segn la durabilidad elctrica
deseada. En tal caso, se recomienda consultar las curvas que indican el
calibre del contactor que se debe utilizar en funcin de la corriente
cortada, y que figuran igualmente en el catlogo de producto. Dichas
curvas se han utilizado en los ejemplos de eleccin para control de
motores.
El entorno de los contactores en cada aplicacin es el mismo: montaje en
cofre y temperatura ambiente exterior = 40 C, es decir, unos 55 C en el
entorno del aparato dentro del cofre.
De este modo se aprecia mejor la diferencia del calibre elegido para cada
una de las aplicaciones.
Herencia Castillo Fabio
Pagina 17
LECTURA Y REDACCIN
2011
La potencia de los receptores es de 22 Kw en 400 V/50 Hz (230 V para
las lmparas)...
6.2. Rels.
El Rel o Relevadores es un dispositivo electromecnico. Funciona como un
interruptor controlado por un circuito elctrico en el que, por medio de una
bobina y un electroimn, se acciona un juego de uno o varios contactos que
permiten abrir o cerrar otros circuitos elctricos independientes. Fue inventado
por Joseph Henry en 1835.
Dado que el rel es capaz de controlar un circuito de salida de mayor potencia
que el de entrada, puede considerarse, en un amplio sentido, como un
amplificador elctrico. Como tal se emplearon en telegrafa, haciendo la
funcin de repetidores que generaban una nueva seal con corriente procedente
de pilas locales a partir de la seal dbil recibida por la lnea. Se les llamaba
"relevadores". De ah "Rel".
Un rel es un sistema mediante el cul se puede controlar una potencia mucho
mayor con un consumo en potencia muy reducido.
6.2.1. Rels de Mando.
6.2.1.1.
Rels electromecnicos:
Estn formados por una bobina y unos contactos los cuales pueden
conmutar corriente continua o bien corriente alterna. Vamos a ver los
diferentes tipos de rels electromecnicos.
Convencionales.
Rels de tipo armadura:
Son los ms antiguos y tambin los ms utilizados. El esquema siguiente
nos explica prcticamente su constitucin y funcionamiento. El
electroimn hace vascular la armadura al ser excitada, cerrando los
contactos dependiendo de si es N.O N.C (normalmente abierto o
normalmente cerrado).
Herencia Castillo Fabio
Pagina 18
LECTURA Y REDACCIN
2011
Rels de Ncleo Mvil:
Estos tienen un mbolo en lugar de la armadura anterior. Se utiliza un
solenoide para cerrar sus contactos, debido a su mayor fuerza atractiva
(por ello es til para manejar altas corrientes).
6.2.1.2.
Polarizados.
Rels Polarizados:
Llevan una pequea armadura, solidaria a un imn permanente. El
extremo inferior puede girar dentro de los polos de un electroimn y el
otro lleva una cabeza de contacto. Si se excita al electroimn, se mueve la
armadura y cierra los contactos. Si la polaridad es la opuesta girar en
sentido contrario, abriendo los contactos cerrando otro circuito (
varios)
6.2.1.3.
Reed inversores.
Rel tipo Reed o de Lengeta:
Formados por una ampolla de vidrio, en cuyo interior estn situados los
contactos (pueden se mltiples) montados sobre delgadas lminas
metlicas. Dichos contactos se cierran por medio de la excitacin de una
bobina, que est situada alrededor de dicha ampolla.
Herencia Castillo Fabio
Pagina 19
LECTURA Y REDACCIN
6.2.1.4.
2011
Rels de estado slido.
Un Rel de estado slido SSR (Solid State Relay), es un circuito
electrnico que contiene en su interior un circuito disparado por nivel,
acoplado a un interruptor semiconductor, un transistor o un tiristor. Por
SSR se entender un producto construido y comprobado en una fbrica,
no un dispositivo formado por componentes independientes que se han
montado sobre una placa de circuito impreso.
Estructura del SSR.
Circuito de Entrada o de Control.
Control por Tensin Continua:
El circuito de entrada suele ser un LED (Fotodiodo), solo o con una
resistencia en serie, tambin podemos encontrarlo con un diodo en
antiparalelo para evitar la inversin de la polaridad por accidente. Los
niveles de entrada son compatibles con TTL, CMOS, y otros valores
normalizados (12V, 24V, etc.).
Control por Tensin Alterna:
El circuito de entrada suele ser como el anterior incorporando un puente
rectificador integrado y una fuente de corriente continua para polarizar el
diodo LED.
Acoplamiento:
El acoplamiento con el circuito se realiza por medio de un optoacoplador
o por medio de un transformador que se encuentra acoplado de forma
magntica con el circuito de disparo del Triac.
Circuito de Conmutacin o de salida:
El circuito de salida contiene los dispositivos semiconductores de
potencia con su correspondiente circuito excitador. Este circuito ser
diferente segn queramos conmutar CC, CA.
6.2.1.5.
Rels temporizadores.
Un rel temporizador es un componente que est diseado para
temporizar eventos en un sistema de automatizacin industrial, cerrando
o abriendo contactos antes, durante o despus del perodo de tiempo
ajustado.
Un temporizador es un aparato mediante el cual, podemos regular la
conexin desconexin de un circuito elctrico pasado un tiempo desde
que se le dio dicha orden.
Herencia Castillo Fabio
Pagina 20
LECTURA Y REDACCIN
2011
Tipos de Rels Temporizadores.
Temporizador a la Conexin:
Cuando el temporizador recibe tensin y pasa un tiempo hasta que
conmuta los contactos, se denomina Temporizador a la Conexin.
Es un rel cuyo contacto de salida conecta despus de un cierto retardo a
partir del instante de conexin de los bornes de su bobina a la red. El
tiempo de retardo es ajustable mediante un potencimetro o regulador
frontal del aparato si es electrnico.
Temporizador a la Desconexin:
Cuando el temporizador deja de recibir tensin y al cabo de un tiempo
conmuta los contactos, se denomina Temporizador a la Desconexin.
Es un rel cuyo contacto de salida conecta instantneamente al aplicar la
tensin de alimentacin en los bornes de la bobina. Al quedar sin
alimentacin, el rel permanece conectado durante el tiempo ajustado por
el potencimetro frontal o remoto, desconectndose al final de dicho
lapso.
6.3.
Elementos de sealizacin y mando.
6.3.1. Elementos de sealizacin.
Son elementos que sirven para indicar cualquier estado en que se encuentran
los elementos de mando y control, tenemos:
6.3.1.1.
Sealizacin Luminosa:
Tenemos a las lmparas incandescentes las cuales estn siendo
reemplazadas por los LEDs (Diodo emisor de luz), su utilizacin de es
para poder visualizar si los dispositivos estn funcionando.
6.3.1.2.
Sealizacin Acstica:
Las mas usuales tenemos a los timbres, sirenas y zumbadores, estas por
lo general suelen indicar de situaciones de funcionamiento peligroso.
6.3.1.3.
Sealizacin ptica:
Normalmente son adhesivos con diferentes colores y marcas o placas
indicadoras situadas alrededor del botn accionador.
6.3.2. Elementos de Mando.
Son elementos de accionamiento que sirven para cerrar o abrir un circuito
permitiendo el paso o no de la corriente a travs de ellos, tenemos:
Herencia Castillo Fabio
Pagina 21
LECTURA Y REDACCIN
6.3.2.1.
2011
Accionamiento Manual:
Entre los ms comunes tenemos:
Los Pulsadores:
Son los que conectan y desconectan mediante un pulso y posteriormente
vuelven a su posicin inicial.
Los Conmutadores:
Suelen ser botones o palancas giratorias que abren o cierran circuitos
mediante conmutacin de levas.
6.3.2.2.
Accionamiento Automtico:
Entre los ms comunes tenemos:
Finales de Carrera:
Son dispositivos situados al final del recorrido de un elemento mvil y su
accionamiento es mecnico.
Los Sensores:
Un sensor es un dispositivo capaz de detectar magnitudes fsicas o
qumicas, llamadas variables de instrumentacin, y transformarlas en
variables elctricas. Las variables de instrumentacin pueden ser por
ejemplo: temperatura, intensidad lumnica, distancia, aceleracin,
inclinacin, desplazamiento, presin, fuerza, torsin, humedad, pH, etc.
Una magnitud elctrica puede ser una resistencia elctrica (como en una
RTD), una capacidad elctrica (como en un sensor de humedad), una
Tensin elctrica (como en un termopar), una corriente elctrica (como
en un fototransistor), etc.
7. Conclusiones.
Podemos definir al Rel y Contactor como un aparato mecnico de conexin
y desconexin elctrica, accionado por cualquier forma de energa, menos
manual, capaz de establecer, soportar e interrumpir corrientes en
condiciones normales del circuito, incluso las de sobrecarga.
Existe gran variedad de dispositivos auxiliares de mando, la diferencia entre
unos y otros radica muy especialmente en el campo de aplicacin.
En cuando a los contactores, se puede notar su gran importancia en cuanto
al desarrollo de sistemas de produccin y de la industria en general.
Es muy importante la caracterstica de proteccin al operario que posee el
contactor pues la conservacin de la integridad de la vida humana debe ser
prioridad siempre.
Gracias al uso de estos dispositivos se han logrado muchos procesos que
antes no se podan imaginar por su cantidad de maniobras.
Existen gran cantidad de clases de contactor para lo cual debemos tener muy
en cuenta las caractersticas de la carga para la escogencia de estos.
Herencia Castillo Fabio
Pagina 22
LECTURA Y REDACCIN
2011
La bobina es el elemento fundamental para el funcionamiento del contactor.
Los contactos son el principal elemento en cuanto a la aplicacin del
contactor.
El arco elctrico es el principal obstculo en el diseo de instalaciones con
contactores.
8. Referencias Bibliogrficas.
http://www.voltimum.es/news/1785/s/Elecci-n-de-un-contactor-paraaplicaciones-no-motor.html
http://www.profesormolina.com.ar/electromec/contactor.htm
http://www.schneider-electric.cl/documents/local/cap05.pdf
Herencia Castillo Fabio
Pagina 23
LECTURA Y REDACCIN
2011
INDICE
A
Accionadores.....................................................................................................................9
accionamiento..................................................................................................................12
Automatizacin Industrial..............................................................................................5
C
CAD...................................................................................................................................6
CADICAE.........................................................................................................................6
CAM..................................................................................................................................6
CIM....................................................................................................................................6
Contactor.........................................................................................................................11
M
Maquinas...........................................................................................................................9
R
Reed inversores................................................................................................................19
Relevadores....................................................................................................................18
revolucin industrial..........................................................................................................6
S
sensor..............................................................................................................................22
Simbologa y referenciado...............................................................................................14
SSR..................................................................................................................................20
Herencia Castillo Fabio
Pagina 24
También podría gustarte
- Procesamiento e interpretación de SEVs utilizando softwareDocumento7 páginasProcesamiento e interpretación de SEVs utilizando softwarePaul SoriaAún no hay calificaciones
- Desarrollo Guía N°3Documento5 páginasDesarrollo Guía N°3gerley quirozAún no hay calificaciones
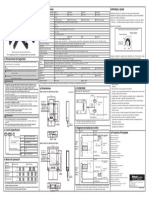
- Autonics Bup Esp ManualDocumento1 páginaAutonics Bup Esp ManualfchumpitazAún no hay calificaciones
- Ejemplos de Sistema de Lazo AbiertoDocumento7 páginasEjemplos de Sistema de Lazo AbiertoCINTHIA DEL ÁNGEL SANTIAGOAún no hay calificaciones
- Conservación Del SueloDocumento6 páginasConservación Del SuelogeraldineAún no hay calificaciones
- SEO060209C93 SAi 00093355 ASO141209F25Documento1 páginaSEO060209C93 SAi 00093355 ASO141209F25Ashley Elizabeth Urías IribeAún no hay calificaciones
- Itse Instrucciones para Llenado Del Formato DD - JJ .Documento3 páginasItse Instrucciones para Llenado Del Formato DD - JJ .Carlos GuerreroAún no hay calificaciones
- Rubrica para Evaluar Un Cuento EscritoDocumento3 páginasRubrica para Evaluar Un Cuento EscritoguadalupeAún no hay calificaciones
- Manejo Del Paciente Con Neuropatia Diabetica PerifericaDocumento43 páginasManejo Del Paciente Con Neuropatia Diabetica PerifericaEduardo MacoAún no hay calificaciones
- Restricciones en CipollettiDocumento15 páginasRestricciones en CipollettiURN Noticias OnlineAún no hay calificaciones
- PDF Cfe Caracteristicas Tecnicas Relevadores de Proteccion CompressDocumento56 páginasPDF Cfe Caracteristicas Tecnicas Relevadores de Proteccion Compresseduardo ulloaAún no hay calificaciones
- Dokumen - Tips - Partitura Completa Abba PadreDocumento26 páginasDokumen - Tips - Partitura Completa Abba PadreAlberto de jesus Macias vidalAún no hay calificaciones
- ApalancamientoDocumento14 páginasApalancamientoPerezAún no hay calificaciones
- Functional Programming With Elixir EsDocumento29 páginasFunctional Programming With Elixir Eselkinlon0930Aún no hay calificaciones
- Heridas ExposicionDocumento35 páginasHeridas ExposicionVictor Hugo Garcia CuadradoAún no hay calificaciones
- Guía para La Recolección de Semillas de Los Vegetales Más Comunes (Seed Savers' Handbook)Documento52 páginasGuía para La Recolección de Semillas de Los Vegetales Más Comunes (Seed Savers' Handbook)Mauricio Roberto Velasquez ZilvettyAún no hay calificaciones
- Informe Anual SGT 2016 Resumen Gestión Turismo TrujilloDocumento8 páginasInforme Anual SGT 2016 Resumen Gestión Turismo TrujilloValderramaGaitanVirginiaAún no hay calificaciones
- MANUAL USUARIO Rayto 7200Documento50 páginasMANUAL USUARIO Rayto 7200NOLLY PIO80% (5)
- Yacon ImprimirDocumento4 páginasYacon ImprimirmarioAún no hay calificaciones
- Manual Supervivencia EscolarDocumento20 páginasManual Supervivencia EscolarJirfunsote PayudoAún no hay calificaciones
- Area de Influencia Directa e IndirectaDocumento5 páginasArea de Influencia Directa e IndirectaWwo PlznciaAún no hay calificaciones
- Entendimiento de RetailDocumento56 páginasEntendimiento de RetailMarcela RomanAún no hay calificaciones
- Wuolah Free Tema 4 Servicio AISDocumento13 páginasWuolah Free Tema 4 Servicio AISElpana cosmicoAún no hay calificaciones
- 1 GRM 001 Manual SgcsDocumento17 páginas1 GRM 001 Manual SgcsstivenrivasAún no hay calificaciones
- Ejercicios de Celdas ABSOLUTASDocumento11 páginasEjercicios de Celdas ABSOLUTASJuan Ramón Panqueva DelgadoAún no hay calificaciones
- Mapa ProteinasDocumento1 páginaMapa ProteinasBrayan Armenta ValenzuelaAún no hay calificaciones
- Censo Electores Madrid 1858Documento30 páginasCenso Electores Madrid 1858Felipe Diez100% (1)
- Ficha Tecnica de DuchaDocumento3 páginasFicha Tecnica de DuchaAngaman Ventas SACAún no hay calificaciones
- Evaluación U2 PDFDocumento4 páginasEvaluación U2 PDFAyónPlayAún no hay calificaciones
- ANÁLISIS ManovaDocumento4 páginasANÁLISIS ManovaKaren ContrerasAún no hay calificaciones