También podría gustarte
- Memoria de Acreditacion HidricaDocumento4 páginasMemoria de Acreditacion HidricaCarlos EchegarayAún no hay calificaciones
- Metrados de Inst. SanitariaDocumento1 páginaMetrados de Inst. SanitariaCarlos EchegarayAún no hay calificaciones
- Calculo de Demanda HidricaDocumento14 páginasCalculo de Demanda HidricaCarlos EchegarayAún no hay calificaciones
- Calculo Hidraulico de AguaDocumento7 páginasCalculo Hidraulico de AguaCarlos EchegarayAún no hay calificaciones
- Oficio de Entrega de DocumentosDocumento1 páginaOficio de Entrega de DocumentosCarlos EchegarayAún no hay calificaciones
- Metrados de EstructurasDocumento8 páginasMetrados de EstructurasCarlos EchegarayAún no hay calificaciones
- Memoria Descriptiva F-17Documento1 páginaMemoria Descriptiva F-17Carlos EchegarayAún no hay calificaciones
- Metas Del ProyectoDocumento1 páginaMetas Del ProyectoCarlos EchegarayAún no hay calificaciones
- Diseño de CaptacionDocumento2 páginasDiseño de CaptacionCarlos EchegarayAún no hay calificaciones
- 18.5. - Informe de Estado SituacionalDocumento23 páginas18.5. - Informe de Estado SituacionalCarlos EchegarayAún no hay calificaciones
- Panel FotograficoDocumento7 páginasPanel FotograficoCarlos EchegarayAún no hay calificaciones
- Ejercicio Alcantarilla-BadenDocumento3 páginasEjercicio Alcantarilla-BadenCarlos EchegarayAún no hay calificaciones
- Panel QuilanDocumento6 páginasPanel QuilanCarlos EchegarayAún no hay calificaciones
- Padron Consolidado - Yamango 05loc - V2Documento12 páginasPadron Consolidado - Yamango 05loc - V2Carlos EchegarayAún no hay calificaciones
- 18.5. - Informe de Estado SituacionalDocumento18 páginas18.5. - Informe de Estado SituacionalCarlos EchegarayAún no hay calificaciones
- TDR Elabor. Expediente Parque MicaelaDocumento12 páginasTDR Elabor. Expediente Parque MicaelaCarlos EchegarayAún no hay calificaciones
- 3.0 TDR Ayabaca Suyopampa Cui 2495764Documento79 páginas3.0 TDR Ayabaca Suyopampa Cui 2495764Carlos EchegarayAún no hay calificaciones
- 18.06. Plan de Seguridad y Salud OcupacionalDocumento41 páginas18.06. Plan de Seguridad y Salud OcupacionalCarlos EchegarayAún no hay calificaciones
- 18.6. - Informe de OperatividadDocumento3 páginas18.6. - Informe de OperatividadCarlos EchegarayAún no hay calificaciones
- 18.07. - Estudio de Gestion de RiesgosDocumento49 páginas18.07. - Estudio de Gestion de RiesgosCarlos EchegarayAún no hay calificaciones
- 18.4. - Informe de No DuplicidadDocumento2 páginas18.4. - Informe de No DuplicidadCarlos EchegarayAún no hay calificaciones
- Clase 25 - 26. Mayo.2019Documento61 páginasClase 25 - 26. Mayo.2019Carlos EchegarayAún no hay calificaciones
- Clase 18 - 19. Mayo.2019Documento91 páginasClase 18 - 19. Mayo.2019Carlos EchegarayAún no hay calificaciones
- 18.03. - Informe de Sostenibilidad de Los ServiciosDocumento539 páginas18.03. - Informe de Sostenibilidad de Los ServiciosCarlos EchegarayAún no hay calificaciones
- 18.1.-Manual de Operación y MantenimientoDocumento88 páginas18.1.-Manual de Operación y MantenimientoCarlos EchegarayAún no hay calificaciones
- Instructivo Formato 12B Seguimiento PDFDocumento46 páginasInstructivo Formato 12B Seguimiento PDFPaola Cecilia Gamboa RospigliosiAún no hay calificaciones
- Diseño de Canales y Obras HidraulicasDocumento100 páginasDiseño de Canales y Obras HidraulicasCarlos EchegarayAún no hay calificaciones
- 1.2.7. - Conexiones Domiciliarias - ChuripampaDocumento1 página1.2.7. - Conexiones Domiciliarias - ChuripampaCarlos EchegarayAún no hay calificaciones
- Instructivo Formato 08 EjecucionDocumento36 páginasInstructivo Formato 08 EjecucionYaneth Mendoza LermaAún no hay calificaciones
- 1.2.9. - Detalle de Reservorio de 10m3Documento3 páginas1.2.9. - Detalle de Reservorio de 10m3Carlos EchegarayAún no hay calificaciones
- Anc - IntangiblesDocumento8 páginasAnc - IntangiblesAnthony RiveraAún no hay calificaciones
- Redes TallerDocumento7 páginasRedes TallerAndreqsAún no hay calificaciones
- El Computador Es Una Herramienta Completa y Compleja Debido A Sus Infinidades de UsosDocumento8 páginasEl Computador Es Una Herramienta Completa y Compleja Debido A Sus Infinidades de UsosYairEdwardSantiagoAún no hay calificaciones
- Manual Mantenimiento de Una LaptopDocumento5 páginasManual Mantenimiento de Una Laptopapi-721847160Aún no hay calificaciones
- Documentación Tema 2 - ALV Con Módulos de FuncionesDocumento21 páginasDocumentación Tema 2 - ALV Con Módulos de FuncionesSaritha RomeroAún no hay calificaciones
- Informe de Modelacion HidraulicaDocumento22 páginasInforme de Modelacion HidraulicaGustavo torrezAún no hay calificaciones
- Ocam 2021 775 223 0Documento2 páginasOcam 2021 775 223 0Paul H. Departamento de VentasAún no hay calificaciones
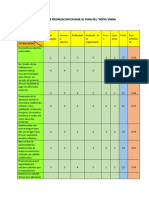
- Matriz de Prioridad Foda Hotel VinisaDocumento2 páginasMatriz de Prioridad Foda Hotel VinisaDiana RiosAún no hay calificaciones
- Centro de Transformacion de Intemperie Sobre ApoyoDocumento12 páginasCentro de Transformacion de Intemperie Sobre ApoyoElisa Rojas GirettAún no hay calificaciones
- Nervio Vago Resdes Neuron AlesDocumento28 páginasNervio Vago Resdes Neuron AlesHernan Dario Garcia BastidasAún no hay calificaciones
- Contenidos Fundamentales MatematicaDocumento2 páginasContenidos Fundamentales MatematicaMacarena GalvanAún no hay calificaciones
- Investigacion de Sistemas DigitalesDocumento5 páginasInvestigacion de Sistemas DigitalesAdán frqncoAún no hay calificaciones
- Amplificador OperacionalDocumento6 páginasAmplificador OperacionalEric Dueñas TrujilloAún no hay calificaciones
- Business Footprint DiagramDocumento2 páginasBusiness Footprint DiagramEduardo CoronaAún no hay calificaciones
- UPS2019Documento15 páginasUPS2019Gerardo D. AguilarAún no hay calificaciones
- Diodos Transistores Ics JocDocumento10 páginasDiodos Transistores Ics JocMarianaFridaAún no hay calificaciones
- INTRODUCCIÓN Dibujo TecnicoDocumento14 páginasINTRODUCCIÓN Dibujo TecnicoIvanAún no hay calificaciones
- CALCULO 1 Ing. BazanDocumento256 páginasCALCULO 1 Ing. BazanFRANKLIN QUELCAAún no hay calificaciones
- Actividad 3. MétodosDocumento9 páginasActividad 3. MétodosCarmen Cánova ValladaresAún no hay calificaciones
- Sesión de Aprendizaje #1 (7 de Marzo)Documento2 páginasSesión de Aprendizaje #1 (7 de Marzo)jese jeff gutierrez cardenasAún no hay calificaciones
- Relé Electrónicos (EXPOSICIÓN)Documento36 páginasRelé Electrónicos (EXPOSICIÓN)Ernesto GonzalezAún no hay calificaciones
- PDFDocumento2 páginasPDFVictor ZbAún no hay calificaciones
- C13 C15 ElectrogeneradoresDocumento277 páginasC13 C15 Electrogeneradoresalan gonzalez100% (3)
- ErgonomiaDocumento2 páginasErgonomialuisa21bejaranoAún no hay calificaciones
- PLAN DE VALIDACION (Edinson Carrasco) - 1Documento3 páginasPLAN DE VALIDACION (Edinson Carrasco) - 1Edison CarrascoAún no hay calificaciones
- Sistema de Información de Recursos Humanos DefiniciónDocumento4 páginasSistema de Información de Recursos Humanos DefiniciónRoberto Carlos Rengifo FigueroaAún no hay calificaciones
- REGISTRO AUXILIAR 2C II Trimestre Segundo GrupoDocumento16 páginasREGISTRO AUXILIAR 2C II Trimestre Segundo GrupoAnonymous gMMaFQr5CAún no hay calificaciones
- 2022 - Elaboración de Citas y Referencias Con APA 7.a Ed. - YNVDocumento44 páginas2022 - Elaboración de Citas y Referencias Con APA 7.a Ed. - YNVleideru100% (1)
- Evidencia Cuadro Comparativo Reconocer Diferentes Topologias Redes y CaracteristicasDocumento2 páginasEvidencia Cuadro Comparativo Reconocer Diferentes Topologias Redes y CaracteristicasDiego Jimenez IbañezAún no hay calificaciones
- Cuadro Comparativo Tic, Tac y TepDocumento3 páginasCuadro Comparativo Tic, Tac y TepMizraim Jiménez100% (1)