También podría gustarte
- CCP LU 10 Sufrimiento y Esperanza - El Significado de La Cruz y La Resurreccion 10.02.2016 - Coverpage-2Documento15 páginasCCP LU 10 Sufrimiento y Esperanza - El Significado de La Cruz y La Resurreccion 10.02.2016 - Coverpage-2VekomaAún no hay calificaciones
- Caso de Dogma Central de La Biologia Molecular y Perdida Del RNA CircularDocumento3 páginasCaso de Dogma Central de La Biologia Molecular y Perdida Del RNA CircularSandy MendezAún no hay calificaciones
- Tema5 Sist NerviosoDocumento23 páginasTema5 Sist NerviosoAna Isabel Martin ZayasAún no hay calificaciones
- Entregable 4 - Grupo 8Documento18 páginasEntregable 4 - Grupo 8Diana ZavaletaAún no hay calificaciones
- Huaycan PlanosDocumento108 páginasHuaycan Planosliv ramirez chaconAún no hay calificaciones
- Actividad Fase 2 Responsabilidad Social Grupo 1Documento13 páginasActividad Fase 2 Responsabilidad Social Grupo 1Laurita PorrasAún no hay calificaciones
- Contrato - Caroline Yamilett Ruiz AguilarDocumento4 páginasContrato - Caroline Yamilett Ruiz AguilarRosa Pintado (Ecommerce Hotelero)Aún no hay calificaciones
- Impac Cement o Plastic oDocumento1 páginaImpac Cement o Plastic oAMMON MIBSAM MORA JIMENEZAún no hay calificaciones
- Razon y ProporcionDocumento23 páginasRazon y ProporciontottyAún no hay calificaciones
- Proporciones en La CircunferenciaDocumento8 páginasProporciones en La CircunferenciaNicolás Melgarejo SabelleAún no hay calificaciones
- Departamento de SacatepéquezDocumento10 páginasDepartamento de SacatepéquezGeorge DCAún no hay calificaciones
- Evaluacion (Circuito Digital) Corte IIIDocumento5 páginasEvaluacion (Circuito Digital) Corte IIIMariangélica Velásquez ColinaAún no hay calificaciones
- Actividad de Niños MisionesDocumento10 páginasActividad de Niños MisionesSaraAún no hay calificaciones
- Bizcocho de Naranja, Coco y Almendra (Sin Gluten y Sin Leche) - CocinaDocumento7 páginasBizcocho de Naranja, Coco y Almendra (Sin Gluten y Sin Leche) - CocinaCesar Eduardo Romo DelgadoAún no hay calificaciones
- Informe 1. Productos AgricolasDocumento10 páginasInforme 1. Productos AgricolasLeandroFuentesMedinaAún no hay calificaciones
- Pdot DauleDocumento140 páginasPdot DaulealejandraAún no hay calificaciones
- Informe de Laboratio Comunicaciones Digitales Señal AM y FMDocumento15 páginasInforme de Laboratio Comunicaciones Digitales Señal AM y FMJuan David AriasAún no hay calificaciones
- Emilio Saad - EL FAMILIARDocumento64 páginasEmilio Saad - EL FAMILIARDiscopy Dis CopyAún no hay calificaciones
- TEMA 2 - La Energia - CirculoDocumento10 páginasTEMA 2 - La Energia - CirculoCristopher SanchezAún no hay calificaciones
- Permiso de Corte y SoldaduraDocumento1 páginaPermiso de Corte y Soldadura16764488Aún no hay calificaciones
- Gráfico Análisis Pestel PEST Gratis Imprimible MulticolorDocumento1 páginaGráfico Análisis Pestel PEST Gratis Imprimible Multicolormaye28313410Aún no hay calificaciones
- El TempleDocumento15 páginasEl TempleJoseAlemanAún no hay calificaciones
- Estetica Del Perdon en El Cuento La VengDocumento16 páginasEstetica Del Perdon en El Cuento La VengLaura Alejandra Rivera SaavedraAún no hay calificaciones
- Estudio Sobre Mujeres y Feminismo-WebDocumento136 páginasEstudio Sobre Mujeres y Feminismo-WebÁyax Telamonio100% (1)
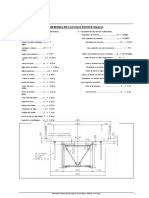
- Memoria de Calculo VigasDocumento51 páginasMemoria de Calculo VigasMick Tirado SilvaAún no hay calificaciones
- Informe Microondas ChachapoyasDocumento83 páginasInforme Microondas ChachapoyassergioabelramirezzapAún no hay calificaciones
- Uso Tecnologialimpia Ejmp ChileDocumento41 páginasUso Tecnologialimpia Ejmp Chilejavier calderon lujanAún no hay calificaciones
- Actividad AplicativaDocumento9 páginasActividad AplicativaAlexander Colqe0% (1)
- RDP 8 Pasos MANIPULACIÓN MANUAL DE CARGA SUSPENDIDA EN RETIRO DE ESTACIONES DE POLINDocumento10 páginasRDP 8 Pasos MANIPULACIÓN MANUAL DE CARGA SUSPENDIDA EN RETIRO DE ESTACIONES DE POLINCamila Alejandra GodoyAún no hay calificaciones