También podría gustarte
- Taller 6 Parte 1Documento27 páginasTaller 6 Parte 1Manûû PatîñôAún no hay calificaciones
- Experiencias Electrostáticas IIDocumento4 páginasExperiencias Electrostáticas IISebastian MathieurAún no hay calificaciones
- Taller Probabilidad Mayo 29 PDFDocumento1 páginaTaller Probabilidad Mayo 29 PDFNatalia Arias CastellanosAún no hay calificaciones
- ProblmagnetismoDocumento10 páginasProblmagnetismoRossana Velozo MardonesAún no hay calificaciones
- ElectromagnetismoDocumento7 páginasElectromagnetismokaty b.mAún no hay calificaciones
- Marco Teorico de Espectros de CobreDocumento2 páginasMarco Teorico de Espectros de CobreJhonatan Mallqui QuispeAún no hay calificaciones
- Diseño y Producción de Trampas Magnéticas y Ópticas para Gases Ultrafríos de Litio 6Documento100 páginasDiseño y Producción de Trampas Magnéticas y Ópticas para Gases Ultrafríos de Litio 6Ernesto CarroAún no hay calificaciones
- Ensayo HumanidadesDocumento4 páginasEnsayo HumanidadesLol AxelAún no hay calificaciones
- MALOKADocumento10 páginasMALOKAjennyAún no hay calificaciones
- Antena MA5V Vertical Multibanda HFDocumento3 páginasAntena MA5V Vertical Multibanda HFAlejandro Sunde100% (1)
- Fuerza ElectromotrizDocumento4 páginasFuerza ElectromotrizAlejandro Chancusi RamosAún no hay calificaciones
- Evaluación Interna - MatematicaDocumento13 páginasEvaluación Interna - MatematicasebasAún no hay calificaciones
- FGL 029 Guia de Laboratorio 3 - Aplicaciones Del DiodoDocumento3 páginasFGL 029 Guia de Laboratorio 3 - Aplicaciones Del DiodoJuan Diego AngelAún no hay calificaciones
- Practica 2genDocumento3 páginasPractica 2genNo mas nombresAún no hay calificaciones
- Carga y Descarga de Un CondensadorDocumento14 páginasCarga y Descarga de Un CondensadorOscar Leonardo MAún no hay calificaciones
- Eeym U1 A1 ArcnDocumento4 páginasEeym U1 A1 ArcnArmandoAún no hay calificaciones
- 1 Examen C.D 2020Documento3 páginas1 Examen C.D 2020merly100% (1)
- ElectroMaterialApoyo PDFDocumento59 páginasElectroMaterialApoyo PDFwilliam0% (1)
- 1e ElectrostáticaDocumento5 páginas1e ElectrostáticaElian david chinome leonAún no hay calificaciones
- 1 IntroduccionCEM - Ivan SabelaDocumento61 páginas1 IntroduccionCEM - Ivan SabelaYennifer TorresAún no hay calificaciones
- Trabajo Escrito Electroscopio Casero 2023Documento12 páginasTrabajo Escrito Electroscopio Casero 2023mauricio arguedas prendasAún no hay calificaciones
- ElectricidadDocumento10 páginasElectricidadRodrigo Colque QuispeAún no hay calificaciones
- Evaluacion Fundamentos de Modelos CircuitalesDocumento3 páginasEvaluacion Fundamentos de Modelos CircuitalesAlejandro AllerAún no hay calificaciones
- 6-EVEQUOZ-Rectificadores para Servicios Auxiliares en SubestacionesDocumento1 página6-EVEQUOZ-Rectificadores para Servicios Auxiliares en SubestacioneskjkljkljlkjljlkAún no hay calificaciones
- Informe Laboratorio 3Documento16 páginasInforme Laboratorio 3Sebastian CespedesAún no hay calificaciones
- TEMA-1 Repaso de Conceptos Basicos de Electricidad y Magnetismo U.Madrid PDFDocumento31 páginasTEMA-1 Repaso de Conceptos Basicos de Electricidad y Magnetismo U.Madrid PDFandresAún no hay calificaciones
- La Aromaticidad de MobiusDocumento5 páginasLa Aromaticidad de MobiusPedro MejíasAún no hay calificaciones
- Practica 2 SeñalesDocumento7 páginasPractica 2 SeñalesAndrea GiraldoAún no hay calificaciones
- La FotocopiadoraDocumento12 páginasLa FotocopiadoraPercy TamaniAún no hay calificaciones
- Diseño 2 Taller 1 PDFDocumento9 páginasDiseño 2 Taller 1 PDFKevin Johan OlarteAún no hay calificaciones
- Formulario Integración PDFDocumento1 páginaFormulario Integración PDFCarlos FreitasAún no hay calificaciones
- Laboratorio Electricidad y MagnetismoDocumento9 páginasLaboratorio Electricidad y MagnetismoFabio Alexander Cortes RodriguezAún no hay calificaciones
- Ecuaciones Maxwell WikiDocumento12 páginasEcuaciones Maxwell Wiki1SRA3LAún no hay calificaciones
- Pasa Banda y Rechaza BandaDocumento10 páginasPasa Banda y Rechaza BandaYesid Esteban Mena PantojaAún no hay calificaciones
- Estres Oxidativo Antioxidante y Enfermedad 2013Documento8 páginasEstres Oxidativo Antioxidante y Enfermedad 2013Gonzalo OrtizAún no hay calificaciones
- Electrostatica Informe PDFDocumento27 páginasElectrostatica Informe PDFyuryAún no hay calificaciones
- PicabiaDocumento20 páginasPicabiaGiovannyAún no hay calificaciones
- Diagrama de Niveles de EnergíaDocumento3 páginasDiagrama de Niveles de Energíaviviana taveraAún no hay calificaciones
- Kfis1 U3 A3 Hegr PDFDocumento7 páginasKfis1 U3 A3 Hegr PDFGerardo Castillo AguirreAún no hay calificaciones
- Aplicaciones Tecnológicas de La Emisión Electrónica de ÁtomosDocumento6 páginasAplicaciones Tecnológicas de La Emisión Electrónica de ÁtomosJORGE GABRIEL PECH CASANOVAAún no hay calificaciones
- Tarea 10Documento4 páginasTarea 10Dalia García VázquezAún no hay calificaciones
- Oscilador MeissnerDocumento5 páginasOscilador Meissnerjuanelos14Aún no hay calificaciones
- Galvanometro Ley de AmpereDocumento5 páginasGalvanometro Ley de AmpereCatherine Ortega MAún no hay calificaciones
- Taller 1Documento2 páginasTaller 1SebastianForeroAún no hay calificaciones
- Experiencia 6 (Vitacura)Documento2 páginasExperiencia 6 (Vitacura)Diego SerráAún no hay calificaciones
- Experiencia 4 Transformadores TrifasicosDocumento7 páginasExperiencia 4 Transformadores TrifasicosEIEEAún no hay calificaciones
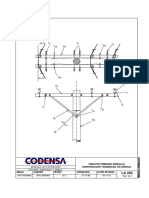
- La 203Documento2 páginasLa 203JuanDavidVargasAún no hay calificaciones
- Kedi U2 A2 Ivce PDFDocumento16 páginasKedi U2 A2 Ivce PDFIsmael ChoixAún no hay calificaciones
- Proyecto Final Electronica Analoga 1Documento6 páginasProyecto Final Electronica Analoga 1SebastianGarciaAún no hay calificaciones
- Unidad 6: Corriente Eléctrica EstacionariaDocumento16 páginasUnidad 6: Corriente Eléctrica EstacionariajuanpereAún no hay calificaciones
- Sistemas de ConstrucciónDocumento7 páginasSistemas de ConstrucciónNancy GaitanAún no hay calificaciones
- Planeación U1 - Física PDFDocumento14 páginasPlaneación U1 - Física PDFAlma Hernandez Correo TelmexAún no hay calificaciones
- Filtro Pasa BajasDocumento6 páginasFiltro Pasa BajasMiguelAún no hay calificaciones
- El Estado Del Arte en NanotecnologíaDocumento16 páginasEl Estado Del Arte en NanotecnologíaVidal Crispin Santiesteban100% (1)
- Apuntes SEP UBBDocumento110 páginasApuntes SEP UBBJosé Ignacio PastenAún no hay calificaciones
- Elect Ost Á TicaDocumento35 páginasElect Ost Á Ticacesar coronaAún no hay calificaciones
- Guias ElectromagnetismoDocumento68 páginasGuias ElectromagnetismoJoanJRamirezAún no hay calificaciones
- Fisica Informe Ley LaplaceDocumento4 páginasFisica Informe Ley LaplaceAlberto RoblesAún no hay calificaciones
- Aplicasiones Del FisicaDocumento10 páginasAplicasiones Del FisicaIver PocotaAún no hay calificaciones
- La TriboelectricidadDocumento5 páginasLa Triboelectricidadalexandra CTAún no hay calificaciones
- Lab #2 Voltaje y Corriente CA Parte I CIRCUITO III PDFDocumento7 páginasLab #2 Voltaje y Corriente CA Parte I CIRCUITO III PDFJosePuga18Aún no hay calificaciones
- Serie 2cp123Documento14 páginasSerie 2cp123cristianAún no hay calificaciones
- Logica CableadaDocumento23 páginasLogica CableadaÖmär Urbina100% (1)
- Comportamiento de Componentes Ohmicos, No OhmicosDocumento9 páginasComportamiento de Componentes Ohmicos, No OhmicosDertobal100% (7)
- Abb A50-30Documento5 páginasAbb A50-30Alberto RearteAún no hay calificaciones
- Coordinacion Protecciones SummunDocumento4 páginasCoordinacion Protecciones SummunMario ZambranoAún no hay calificaciones
- Anexo 2 Consideraciones TecnicasDocumento2 páginasAnexo 2 Consideraciones TecnicasJoseCarlosGalvezParedesAún no hay calificaciones
- Ejercicio 8Documento2 páginasEjercicio 8Francisco AAún no hay calificaciones
- ResumenDocumento2 páginasResumenMilton Jô50% (2)
- A9R71425Documento2 páginasA9R71425Claudio Benites CruzAún no hay calificaciones
- Universidad Galileo Proyecto de Fuente de Poder DCDocumento5 páginasUniversidad Galileo Proyecto de Fuente de Poder DCKike RileyAún no hay calificaciones
- Gerson La Torre1 PDFDocumento85 páginasGerson La Torre1 PDFElard Gutierrez HuisaAún no hay calificaciones
- NC Ra2 1103Documento10 páginasNC Ra2 1103javier vargasAún no hay calificaciones
- Semana N°15 (Potencial Eléctrico)Documento21 páginasSemana N°15 (Potencial Eléctrico)Carlos M.Aún no hay calificaciones
- Solución Guia 5Documento9 páginasSolución Guia 5Jose MartinezAún no hay calificaciones
- Ejercicios Resueltos de Potencia 1 TareaDocumento18 páginasEjercicios Resueltos de Potencia 1 TareaRoberto PerezAún no hay calificaciones
- Guia 2 Diodos SemiconductoresDocumento18 páginasGuia 2 Diodos SemiconductoresIgnacio MarquezAún no hay calificaciones
- Pliego Bases Tecnicas1Documento29 páginasPliego Bases Tecnicas1Manel SánchezAún no hay calificaciones
- Informe de Laboratorio NDocumento15 páginasInforme de Laboratorio Nkaterine castroAún no hay calificaciones
- Metodologia Del Cuerpo CargadoDocumento9 páginasMetodologia Del Cuerpo CargadoElizabeth Gomez Noguera100% (1)
- Relé MicomDocumento3 páginasRelé Micomoscarlysvillazana742Aún no hay calificaciones
- 88d19 SubmayoDocumento2 páginas88d19 SubmayoCésar Octavio MárquezAún no hay calificaciones
- Uso Del Simulador Lineal en Mwo Guía CompletaDocumento31 páginasUso Del Simulador Lineal en Mwo Guía CompletaJUAN SEBASTIAN GUZMAN ALARCONAún no hay calificaciones
- Actividad No.8 Practica 4 Control de Velocidad de Un Motor EléctricoDocumento4 páginasActividad No.8 Practica 4 Control de Velocidad de Un Motor EléctricoLuis RangelAún no hay calificaciones
- Responsabilidad PatrimonialDocumento9 páginasResponsabilidad PatrimonialYohana TorresAún no hay calificaciones
- UTN Electrotecnia Basica1Documento32 páginasUTN Electrotecnia Basica1jhonnyAún no hay calificaciones
- Valvulas 3 TriodoDocumento8 páginasValvulas 3 TriodoJPetro100% (3)
- Xeft-04hs-Etdv Vers.01 Ficha 3Documento1 páginaXeft-04hs-Etdv Vers.01 Ficha 3Lorena PinoAún no hay calificaciones
- Autos ElectricosDocumento1 páginaAutos ElectricosPedro RamosAún no hay calificaciones
- Diferencial de BarrasDocumento33 páginasDiferencial de BarrasAnonymous ch8u7X100% (1)