También podría gustarte
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Contrato de Recibo Por HonorarioDocumento31 páginasContrato de Recibo Por HonorarioKareling TerrerosAún no hay calificaciones
- Brazo RobóticoDocumento19 páginasBrazo RobóticoAndres Ochoa100% (3)
- Proyecto Brazo HidráulicoDocumento4 páginasProyecto Brazo HidráulicoOscar RinconAún no hay calificaciones
- Reporte de ConcretoDocumento20 páginasReporte de ConcretoFreddi Esqiinca LugoAún no hay calificaciones
- 7 Cosechadora A8000Documento30 páginas7 Cosechadora A8000carlos fajardo g.100% (1)
- Protocolo Brazo RobotDocumento22 páginasProtocolo Brazo RobotJose Luis EsquivelAún no hay calificaciones
- Ejercicios de Flotabilidad y Estabilidad PDFDocumento9 páginasEjercicios de Flotabilidad y Estabilidad PDFangieAún no hay calificaciones
- Delta Robot Open Source ProjectDocumento5 páginasDelta Robot Open Source ProjectMiguel Castro100% (1)
- Dispositivos de Aforo HidraulicaDocumento15 páginasDispositivos de Aforo HidraulicaGisselle AlemanAún no hay calificaciones
- 5.3 Pruebas de Viscosidad Saybolt - Furol en Cementos AsfalticosDocumento18 páginas5.3 Pruebas de Viscosidad Saybolt - Furol en Cementos AsfalticosJesus Jimenez GamezAún no hay calificaciones
- Precios unitarios de obras de infraestructura hidráulicaDocumento282 páginasPrecios unitarios de obras de infraestructura hidráulicaDiego Dionicio Rodríguez González100% (1)
- Problemas Sobre Teorema Fundamental de La HidrostáticaDocumento2 páginasProblemas Sobre Teorema Fundamental de La HidrostáticaEnder neptali fuentes sanchesAún no hay calificaciones
- Flujo laminar vs turbulentoDocumento3 páginasFlujo laminar vs turbulentoYoelcito Martines HuairaAún no hay calificaciones
- Brazo Hidraulico EmprendimientoDocumento12 páginasBrazo Hidraulico EmprendimientoMelissa DiazAún no hay calificaciones
- Principios de La Potencia HidraulicaDocumento25 páginasPrincipios de La Potencia HidraulicaEnrique MoheAún no hay calificaciones
- Carga axialDocumento4 páginasCarga axialsolpawer28Aún no hay calificaciones
- Informe de La Práctica RasantesDocumento18 páginasInforme de La Práctica RasantesCristhian PonceAún no hay calificaciones
- Mecanik D SuelossDocumento8 páginasMecanik D SuelossVivi Fienco JalcaAún no hay calificaciones
- Absorción agregado fino determinada método picnómetroDocumento2 páginasAbsorción agregado fino determinada método picnómetroLuis HernandezAún no hay calificaciones
- Ensayo Sobre HidrostaticaDocumento2 páginasEnsayo Sobre HidrostaticaDavid MaciasAún no hay calificaciones
- El Principio de Transmisibilidad Establece Que Las Condiciones de Equilibrio o Movimiento de Un Sólido Rígido Permanecerán Inalterables Si Una Fuerza FDocumento3 páginasEl Principio de Transmisibilidad Establece Que Las Condiciones de Equilibrio o Movimiento de Un Sólido Rígido Permanecerán Inalterables Si Una Fuerza FJefferson Cesar MamaniAún no hay calificaciones
- Diferencias entre gas y líquidoDocumento2 páginasDiferencias entre gas y líquidoLorena Yupanqui Condori100% (1)
- Informe Sobre Criterio de Aceptación o Rechazo de Lotes de Hormigón para Pavimento RígidoDocumento77 páginasInforme Sobre Criterio de Aceptación o Rechazo de Lotes de Hormigón para Pavimento Rígidojorgepercy1177Aún no hay calificaciones
- SDJHCBJSDCHDocumento5 páginasSDJHCBJSDCHDante Dueñas HanccoAún no hay calificaciones
- Practica 3 - Empuje y FlotaciónDocumento4 páginasPractica 3 - Empuje y FlotaciónricardoAún no hay calificaciones
- Trabajo Final FundacionesDocumento81 páginasTrabajo Final FundacionesJulian Arturo Beltran Garcia100% (1)
- Nivelacion Con MangueraDocumento12 páginasNivelacion Con MangueraNataly CarvajalAún no hay calificaciones
- Método SuperposiciónDocumento23 páginasMétodo SuperposiciónDanferd ValleAún no hay calificaciones
- Analogia Mecanica de TerzaghiDocumento1 páginaAnalogia Mecanica de TerzaghiDiego JuarezAún no hay calificaciones
- Empuje HidrostáticoDocumento7 páginasEmpuje Hidrostáticogaleana21erikAún no hay calificaciones
- Proyecto FisicaaDocumento9 páginasProyecto FisicaaMelvin QPAún no hay calificaciones
- Elementos Que Conforman Un Pavimento Rigido WordDocumento3 páginasElementos Que Conforman Un Pavimento Rigido WordKatherine Pisconte ChuctayaAún no hay calificaciones
- Ensayo Presión HidrostáticaDocumento2 páginasEnsayo Presión HidrostáticaErick Rosero100% (1)
- Mapa ConceptualDocumento2 páginasMapa ConceptualMarcio Laurente100% (2)
- Licuefaccion de Los SuelosDocumento15 páginasLicuefaccion de Los SuelosWilliams CruzVillAún no hay calificaciones
- Brazo HidraulicoDocumento21 páginasBrazo HidraulicoJaneth GantuAún no hay calificaciones
- Lab3 FluidosDocumento13 páginasLab3 FluidosVange HernandezAún no hay calificaciones
- Floculadores MecanicosDocumento8 páginasFloculadores MecanicosKarlita Denisse Campoverde100% (1)
- Tipos de Cimentacion y FallasDocumento2 páginasTipos de Cimentacion y FallasMark Escalante CotrinaAún no hay calificaciones
- Informe Superficies PlanasDocumento35 páginasInforme Superficies PlanaskleinerAún no hay calificaciones
- Flujo UniformeDocumento10 páginasFlujo UniformeVictoria ItzelAún no hay calificaciones
- Fases Del SueloDocumento1 páginaFases Del SueloabiudAún no hay calificaciones
- Practica No 5 - Resistencia A Compresión Simple Del ConcretoDocumento5 páginasPractica No 5 - Resistencia A Compresión Simple Del ConcretoNayelii RamiiRezAún no hay calificaciones
- Armaduras ingeniería soporte estructurasDocumento5 páginasArmaduras ingeniería soporte estructurassobamelachota100% (1)
- Balanza HidrostaticaDocumento5 páginasBalanza HidrostaticaSomeOneAún no hay calificaciones
- Proyecto Elevador HidraulicoDocumento14 páginasProyecto Elevador HidraulicoOraldy RoldanAún no hay calificaciones
- Brazo hidráulico didácticoDocumento53 páginasBrazo hidráulico didácticoJonathan Jalil Cruz Pacheco100% (1)
- 6 5 Prevencion de Fallas de Los TaludesDocumento4 páginas6 5 Prevencion de Fallas de Los Taludesmanuel cervantes vazquezAún no hay calificaciones
- Estructura DispersaDocumento1 páginaEstructura DispersaJeffersonMartinezAún no hay calificaciones
- Características Generales Del HormigónDocumento11 páginasCaracterísticas Generales Del HormigónMaria Carolina ZambranoAún no hay calificaciones
- Ejercicios Columnas Curso VirtualDocumento4 páginasEjercicios Columnas Curso VirtualEdilberto Gálvez Barrientos100% (1)
- Practica HidraulicaDocumento12 páginasPractica HidraulicaAlejandro ReyesAún no hay calificaciones
- Presión hidrostática y principios de Arquímedes y PascalDocumento7 páginasPresión hidrostática y principios de Arquímedes y PascalDiegoAún no hay calificaciones
- Objetivos y Conclusiones Uniones AtornilladasDocumento1 páginaObjetivos y Conclusiones Uniones AtornilladasYhan GSAún no hay calificaciones
- Tarea Diagrama de Flujo, Doble IntegracionDocumento4 páginasTarea Diagrama de Flujo, Doble IntegracionAlan Chavez Garcia100% (2)
- 2.1 Compresibilidad y ConsolidaciónDocumento34 páginas2.1 Compresibilidad y ConsolidaciónYael Atzín Mendoza RamirezAún no hay calificaciones
- Diseño de Un Brazo MecanicoDocumento2 páginasDiseño de Un Brazo MecanicoGordogers CraneAún no hay calificaciones
- Brazo Robotico OmnidireccionalDocumento51 páginasBrazo Robotico OmnidireccionalAndre LlanosAún no hay calificaciones
- Brazo robot 6 grados libertad control LabView AndroidDocumento23 páginasBrazo robot 6 grados libertad control LabView AndroidRodrigoTorresMauresAún no hay calificaciones
- Estructura Mecánica de Un RobotDocumento21 páginasEstructura Mecánica de Un RobotSuspeso100% (1)
- Tarea PersepcionDocumento14 páginasTarea PersepcionKevin CastroAún no hay calificaciones
- Nuevo Iph Just Civica 2020 EditableDocumento5 páginasNuevo Iph Just Civica 2020 EditableFARIV3115100% (5)
- Principales ciudades de VenezuelaDocumento6 páginasPrincipales ciudades de VenezuelaLuisMercaderAún no hay calificaciones
- Soluciones Del Personal Del Trabajo en Un TelarDocumento6 páginasSoluciones Del Personal Del Trabajo en Un TelarJesus GoycocheaAún no hay calificaciones
- Funciones del dinero: medio de pago, unidad de cuenta y depósito de valorDocumento1 páginaFunciones del dinero: medio de pago, unidad de cuenta y depósito de valorCARLOS XAVIEL PEREZ PUJOLSAún no hay calificaciones
- Procesos EstructuralesDocumento30 páginasProcesos EstructuralesLuis Sima83% (6)
- Bolsa de TrabajoDocumento1 páginaBolsa de TrabajoArturo Cortes MirandaAún no hay calificaciones
- Principio de Legalidad PresupuestarioDocumento24 páginasPrincipio de Legalidad PresupuestarioBryan SalazarAún no hay calificaciones
- Check List Verificacion 5S TallerDocumento9 páginasCheck List Verificacion 5S TallerEdinho1980Aún no hay calificaciones
- Inventario Puerto Montt SPWDocumento20 páginasInventario Puerto Montt SPWMaría Laura Zapata RomeroAún no hay calificaciones
- Ejercicios Resueltos de Programacion LinealDocumento68 páginasEjercicios Resueltos de Programacion LinealArthuro EscuderoAún no hay calificaciones
- Actividad 1 1er Corte - Algebra LinealDocumento34 páginasActividad 1 1er Corte - Algebra LinealKevin Yadir MARTINEZ RAMONAún no hay calificaciones
- Manual Del Constructor Polpaico 40 287 1Documento40 páginasManual Del Constructor Polpaico 40 287 1Catalina Soto FernándezAún no hay calificaciones
- Atención cliente mantención vehículoDocumento1 páginaAtención cliente mantención vehículoandresAún no hay calificaciones
- Generación de Código IntermedioDocumento9 páginasGeneración de Código IntermedioWilliam Samuel Vazquez MirandaAún no hay calificaciones
- Compendio FlorezDocumento294 páginasCompendio FlorezERNESTOAún no hay calificaciones
- Ensayo Del Balance de Situacion (Balance General)Documento4 páginasEnsayo Del Balance de Situacion (Balance General)LUIS ALBERTO APARICIO SALCEDOAún no hay calificaciones
- El Procedimineto Trilateral-Hugo Gómez ApacDocumento22 páginasEl Procedimineto Trilateral-Hugo Gómez ApacANREPEHU100% (1)
- GFPI-F-019 Guias 04 de Aprendizaje Ejecucion Actividad Exhibición e Impulso 4 Agosto 14 2015Documento15 páginasGFPI-F-019 Guias 04 de Aprendizaje Ejecucion Actividad Exhibición e Impulso 4 Agosto 14 2015AlejandroAún no hay calificaciones
- Proforma ImpresorasDocumento1 páginaProforma Impresorasmiltonsan83Aún no hay calificaciones
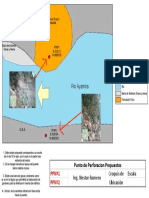
- Formacion Pozo (P-poz) Roca fracturada Rio AyamiraDocumento1 páginaFormacion Pozo (P-poz) Roca fracturada Rio AyamiraJunior Andia CarbajalAún no hay calificaciones
- PC1 Estructuras determinar fuerzas cables candelabro vigasDocumento2 páginasPC1 Estructuras determinar fuerzas cables candelabro vigasJorge Valverde OlivaAún no hay calificaciones
- P&idDocumento19 páginasP&idIsamar Salas MirandaAún no hay calificaciones
- Aaaa PDFDocumento2 páginasAaaa PDFKenny AlbertAún no hay calificaciones
- Manual Gestion y Facturación XLDocumento134 páginasManual Gestion y Facturación XLextradamesAún no hay calificaciones
- Tractores agrícolas e implementos para la cosecha de cultivosDocumento43 páginasTractores agrícolas e implementos para la cosecha de cultivosEuler Portilla CarrascoAún no hay calificaciones
- Triptico Importancia Al ClienteDocumento2 páginasTriptico Importancia Al ClienteFrank Jeffrey Pillpe RiverosAún no hay calificaciones
- Especificaciones Tecnicas CantuDocumento75 páginasEspecificaciones Tecnicas CantuCarlos A. Martínez BenaventeAún no hay calificaciones