También podría gustarte
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- Creación de Una Empresa de PaletasDocumento191 páginasCreación de Una Empresa de Paletasandres benitez100% (2)
- DRamaturgia Del Actor BarbaDocumento6 páginasDRamaturgia Del Actor BarbacesarAún no hay calificaciones
- Danza PrimalDocumento9 páginasDanza PrimalesperanzaAún no hay calificaciones
- El Enigma Spinoza - Irvin D. YalomDocumento16 páginasEl Enigma Spinoza - Irvin D. YalomLorenSente0% (2)
- Topología y geometría diferencial con aplicaciones a la físicaDe EverandTopología y geometría diferencial con aplicaciones a la físicaCalificación: 5 de 5 estrellas5/5 (1)
- Realismo MágicoDocumento17 páginasRealismo Mágicoapi-375610488% (8)
- Gravitación UniversalDocumento14 páginasGravitación UniversalTheSkiPzZAún no hay calificaciones
- PLATÓN - Cartas PDFDocumento129 páginasPLATÓN - Cartas PDFCristián Véliz89% (9)
- Excepcion de CompetenciaDocumento4 páginasExcepcion de CompetenciaElí Conrado Chavez PajueloAún no hay calificaciones
- Metodología para El DebateDocumento4 páginasMetodología para El DebateESTHER ARTEAGA100% (1)
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- CAPITULO VI-CONTROL I-Analisis Del Lugar Geometrico de Las RaicesDocumento41 páginasCAPITULO VI-CONTROL I-Analisis Del Lugar Geometrico de Las RaicesWalter Ernest Muñoz MedinaAún no hay calificaciones
- Grados de LibertadDocumento7 páginasGrados de LibertadAlexis Javiher100% (1)
- Definiciones MecanismosDocumento8 páginasDefiniciones Mecanismosmiguelm_295Aún no hay calificaciones
- Unidad 1 Teoria MecanismosDocumento32 páginasUnidad 1 Teoria MecanismosZack MoralesAún no hay calificaciones
- Unidad 1Documento17 páginasUnidad 1Un minuto másAún no hay calificaciones
- Calculo AvanzadoDocumento9 páginasCalculo AvanzadoLucas NievaAún no hay calificaciones
- Unidad 1 Introduccion A Los MecanismosDocumento10 páginasUnidad 1 Introduccion A Los MecanismosManzanilla Alvarez Carlos AlbertoAún no hay calificaciones
- MecanismoDocumento31 páginasMecanismoJulio Cesar Castillo DelgadoAún no hay calificaciones
- Unidad 2-Fundamentos de La CinemáticaDocumento14 páginasUnidad 2-Fundamentos de La CinemáticaNayeli EsquivelAún no hay calificaciones
- Unidad 1 Introduccion MecanismosDocumento34 páginasUnidad 1 Introduccion MecanismosCriistopher ArreolaAún no hay calificaciones
- Tarea 2Documento11 páginasTarea 2Josue Assael Peña SerafinAún no hay calificaciones
- Reporte de Características, Especificaciones y Posición de Eslabones. (Evidencia 2)Documento10 páginasReporte de Características, Especificaciones y Posición de Eslabones. (Evidencia 2)Armando HuertaAún no hay calificaciones
- Clase 1 - Introducción MecanismosDocumento17 páginasClase 1 - Introducción MecanismosDavidBecerraAún no hay calificaciones
- Unidad 1 Introducción A Los MecanismosDocumento10 páginasUnidad 1 Introducción A Los MecanismosMiguel Alexis GómezAún no hay calificaciones
- 3.1. Qué Son Los Mecanismos 2Documento27 páginas3.1. Qué Son Los Mecanismos 2Eddy Cadena GrandaAún no hay calificaciones
- Capitulo I IntroducciónDocumento34 páginasCapitulo I IntroducciónCristian Peña BorbollonAún no hay calificaciones
- MecanismosDocumento14 páginasMecanismosdavo1094Aún no hay calificaciones
- Informe de MecanismosDocumento11 páginasInforme de Mecanismosfernando castro padillaAún no hay calificaciones
- Clase #6 Movilidad y Ecuación de KutzbachDocumento18 páginasClase #6 Movilidad y Ecuación de Kutzbachboletasprimaria.uecmscAún no hay calificaciones
- Metodo de Las Figuras de Enlace para Resolver Las Ecuaciones Normales en La Compesacion de Grandes RedesDocumento43 páginasMetodo de Las Figuras de Enlace para Resolver Las Ecuaciones Normales en La Compesacion de Grandes RedesDani Anto Del VaAún no hay calificaciones
- Reporte de MaquetaDocumento13 páginasReporte de MaquetaRodrigo Jesús Vázquez HerediaAún no hay calificaciones
- MecanismosDocumento27 páginasMecanismoskarla09101998100% (1)
- EX1 326 Francis LiconaDocumento3 páginasEX1 326 Francis LiconaDIOGENES HERNANDEZAún no hay calificaciones
- Lugar Geometrico de Las RaicesDocumento43 páginasLugar Geometrico de Las RaicesJaeger WillAún no hay calificaciones
- Mecanismos0 PDFDocumento138 páginasMecanismos0 PDFjoel rodriguezAún no hay calificaciones
- 4 CAPITULO 2 Modelamiento DinamicoDocumento32 páginas4 CAPITULO 2 Modelamiento DinamicoJuanManuelHurtadoValdiviaAún no hay calificaciones
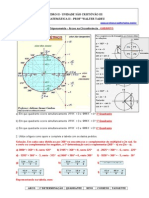
- GABarcosnacircuftrig 2010Documento7 páginasGABarcosnacircuftrig 2010deusvaldojunior6081Aún no hay calificaciones
- 2 - Elementos Finitos. Sistemas DiscretosDocumento10 páginas2 - Elementos Finitos. Sistemas DiscretosgeracuajinaiAún no hay calificaciones
- ArmadurasDocumento19 páginasArmadurasAlex Junior Rodriguez BarranzuelaAún no hay calificaciones
- Cap02 02Documento27 páginasCap02 02Bryan TiconaAún no hay calificaciones
- Experimento de EvansDocumento16 páginasExperimento de EvansAlexis LeyvaAún no hay calificaciones
- Fundamentos de CinematicaDocumento55 páginasFundamentos de CinematicaLeonel José AlvaradoAún no hay calificaciones
- Unidad 1 Introducción A Los MecanismosDocumento10 páginasUnidad 1 Introducción A Los MecanismosSamuelAún no hay calificaciones
- Ej Prop 4 SC1 2019Documento5 páginasEj Prop 4 SC1 2019Nico DomínguezAún no hay calificaciones
- Algoritmo TarjaneDocumento9 páginasAlgoritmo Tarjanevictor orlando sierra foreroAún no hay calificaciones
- Teorema de StokesDocumento5 páginasTeorema de Stokesrolg1292Aún no hay calificaciones
- Analisiscinematicodemecanismosunidad2b 160130181408Documento44 páginasAnalisiscinematicodemecanismosunidad2b 160130181408Alberto M FuentesAún no hay calificaciones
- Algoritmos Computacionales U5Documento6 páginasAlgoritmos Computacionales U5BryanMtzI11Aún no hay calificaciones
- 3022534to3022533 R3022534186223043962348c32e8ec98.93657720Documento10 páginas3022534to3022533 R3022534186223043962348c32e8ec98.93657720DianaAún no hay calificaciones
- El Cristal IdealDocumento8 páginasEl Cristal IdealRodrigoTejadaGallegosAún no hay calificaciones
- JuntasDocumento10 páginasJuntasgaaroAún no hay calificaciones
- La Condición de GrashofDocumento12 páginasLa Condición de GrashofWashigton Estacio TenorioAún no hay calificaciones
- Problema Resuelto DinámicaDocumento11 páginasProblema Resuelto DinámicaAlvaro ConchaAún no hay calificaciones
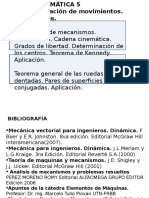
- Tema 5 Cinematica de Mecanismos - 29-09-2016Documento27 páginasTema 5 Cinematica de Mecanismos - 29-09-2016Nicolás OjedaAún no hay calificaciones
- 2 Exa - Solucionario A PREU 2006-IIDocumento2 páginas2 Exa - Solucionario A PREU 2006-IINicanor Mamani TacoAún no hay calificaciones
- S 3 EutiDocumento10 páginasS 3 EutipakoAún no hay calificaciones
- Práctica #10Documento11 páginasPráctica #10edu_manceroAún no hay calificaciones
- Grados e Libertad - Teoria Sesion 1 de 3Documento5 páginasGrados e Libertad - Teoria Sesion 1 de 3Erick González LópezAún no hay calificaciones
- Mecanismos-Unidad 1Documento13 páginasMecanismos-Unidad 1Oyuki MaquedaAún no hay calificaciones
- TESELACIÓN EN OpenGLDocumento8 páginasTESELACIÓN EN OpenGLf_nioAún no hay calificaciones
- Libro A4 - 09 ConjuntosDocumento16 páginasLibro A4 - 09 ConjuntosJair Cardenas JinchoAún no hay calificaciones
- Conf. 1 - Lugar Geométrico de Las RaícesDocumento3 páginasConf. 1 - Lugar Geométrico de Las RaícesClaudio GonzalezAún no hay calificaciones
- Practicas de Regulación Automática: U(s) G(S) E(s) Y(s)Documento8 páginasPracticas de Regulación Automática: U(s) G(S) E(s) Y(s)Alvaro PradesAún no hay calificaciones
- Álgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2De EverandÁlgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2Aún no hay calificaciones
- Lino LATELLA CALDERÓN. Análisis de Los Conceptos de Perdón y Promesa en Hannah ArendtDocumento13 páginasLino LATELLA CALDERÓN. Análisis de Los Conceptos de Perdón y Promesa en Hannah ArendtmarioAún no hay calificaciones
- Investigacion Educativa Deficit de AtencionDocumento33 páginasInvestigacion Educativa Deficit de AtencionGisel Lozada LandaAún no hay calificaciones
- OratoriaDocumento22 páginasOratoriaRafbal RocioAún no hay calificaciones
- Semana 2 - La Investigación CientíficaDocumento9 páginasSemana 2 - La Investigación CientíficaMarife CerronAún no hay calificaciones
- La Resiliencia. Conceptos y Modelos Aplicables Al Entorno EscolarDocumento16 páginasLa Resiliencia. Conceptos y Modelos Aplicables Al Entorno EscolarjesustxiAún no hay calificaciones
- Frases Motivadoras - AutoimpulsoresDocumento2 páginasFrases Motivadoras - AutoimpulsoresBrayan YepezAún no hay calificaciones
- Representacion de La Mujer Princesas DisneyDocumento205 páginasRepresentacion de La Mujer Princesas DisneyBelis Paola Aleman Iguaran100% (1)
- Plan de Atención Tutoríal para El 5Documento7 páginasPlan de Atención Tutoríal para El 5CarlosAndrésAún no hay calificaciones
- Falta Amor FT Ricky Martin: Sebastian YatraDocumento5 páginasFalta Amor FT Ricky Martin: Sebastian YatraAgustina SuarezAún no hay calificaciones
- Unidad II OrganizacionDocumento22 páginasUnidad II OrganizacionMartin Gabriel Miranda100% (1)
- Marco ConceptualDocumento9 páginasMarco ConceptualBeatriz Andrea Rivera LopezAún no hay calificaciones
- Tema 4 - Tipos de Respuesta (T.r.e)Documento18 páginasTema 4 - Tipos de Respuesta (T.r.e)FERNANDO CHAPADOAún no hay calificaciones
- Comentarios Iniciales A La Propiedad IntelectualDocumento2 páginasComentarios Iniciales A La Propiedad IntelectualFélix Valdivia GutiérrezAún no hay calificaciones
- Jesús Vive-El Deseo Rehabilitado PDFDocumento2 páginasJesús Vive-El Deseo Rehabilitado PDFwaliwAún no hay calificaciones
- Texto de Geometria para SecundariaDocumento50 páginasTexto de Geometria para SecundariakemquefAún no hay calificaciones
- 01 Ideas Previas y Cambio ConceptualDocumento8 páginas01 Ideas Previas y Cambio ConceptualAlejandro Salazar100% (1)
- La Invención Del Peronismo en El Interior Del PaísDocumento5 páginasLa Invención Del Peronismo en El Interior Del PaísValentina AhumadaAún no hay calificaciones
- La Teoría Del Buen Vivir - Ensayo GrupalDocumento10 páginasLa Teoría Del Buen Vivir - Ensayo GrupalmiguelAún no hay calificaciones
- Profesora MilagrosDocumento3 páginasProfesora MilagrosCésar ClenAún no hay calificaciones
- 7 Arte de Egipto, M y PDocumento38 páginas7 Arte de Egipto, M y PJulietta CondeñaAún no hay calificaciones
- Ciclo Gestión RiesgoDocumento27 páginasCiclo Gestión Riesgodaniela ayalaAún no hay calificaciones